雷达测速应用多普勒效应。 当无线电波碰到一个静止的物体时,被反射回来的电 波频率与发射的电波频率一样,其差频为零;而当无线电 波碰到一个移动的物体时(不论该物体是迎着发射源还是 背离发射源),被反射回来的电波频率与发射的电波频率 不一样,其差频(多普勒频率)与移动物体的速度成正比, 并与雷达辐射方向和移动物体方向间的夹角有关。 雷达测速的工作原理如图2-18所示
雷达测速应用多普勒效应。 当无线电波碰到一个静止的物体时,被反射回来的电 波频率与发射的电波频率一样,其差频为零;而当无线电 波碰到一个移动的物体时(不论该物体是迎着发射源还是 背离发射源),被反射回来的电波频率与发射的电波频率 不一样,其差频(多普勒频率 )与移动物体的速度成正比, 并与雷达辐射方向和移动物体方向间的夹角有关。 雷达测速的工作原理如图2-18所示
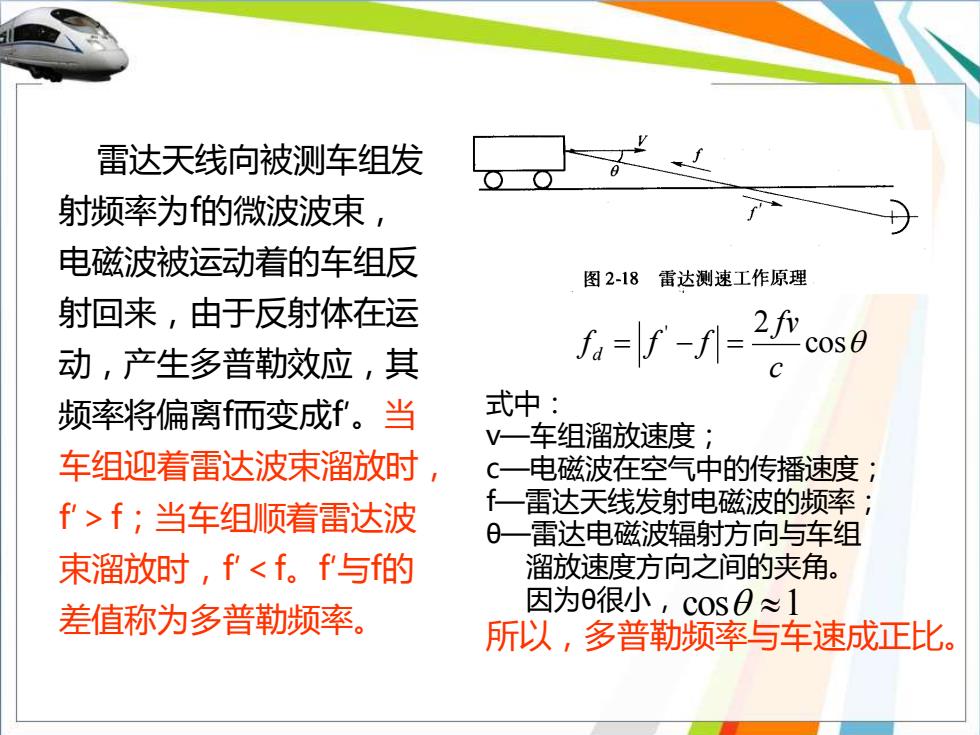
雷达天线向被测车组发 射频率为的微波波束 电磁波被运动着的车组反 图2-18雷达测速工作原理 射回来,由于反射体在运 动,产生多普勒效应,其 方=f-=2 cos0 频率将偏离而变成。当 式中: V一车组溜放速度; 车组迎着雷达波束溜放时, c一电磁波在空气中的传播速度; f>千;当车组顺着雷达波 f一雷达天线发射电磁波的频率; 日一雷达电磁波辐射方向与车组 束溜放时,f<f。f与f的 溜放速度方向之间的夹角。 差值称为多普勒频率。 因为很小,c0s0≈1 所以,多普勒频率与车速成正比
cos ' 2 c fv f f f d = − = 雷达天线向被测车组发 射频率为f的微波波束, 电磁波被运动着的车组反 射回来,由于反射体在运 动,产生多普勒效应,其 频率将偏离f而变成f′。当 车组迎着雷达波束溜放时, f′>f;当车组顺着雷达波 束溜放时,f′<f。f′与f的 差值称为多普勒频率。 式中: v—车组溜放速度; c—电磁波在空气中的传播速度; f—雷达天线发射电磁波的频率; θ—雷达电磁波辐射方向与车组 溜放速度方向之间的夹角。 因为θ很小, 所以,多普勒频率与车速成正比。 1 cos 1
二、 测长设备 1.测长设备的作用 测长设备是用来测量被控车组将要溜放的距离,作为 目的制动车辆减速器出口速度的设定值的主要依据。 (丨)编组线空闲长度是自动化驼峰确定目的制动减速器 出口速度设定值的主要依据。 (2)对于减速器打靶控制来说,它表示被控车组将要溜放 的距离
1.测长设备的作用 测长设备是用来测量被控车组将要溜放的距离,作为 目的制动车辆减速器出口速度的设定值的主要依据。 ( l)编组线空闲长度是自动化驼峰确定目的制动减速器, 出口速度设定值的主要依据。 ( 2)对于减速器打靶控制来说,它表示被控车组将要溜放 的距离。 二、测长设备

(3)编组线内安装减速顶时,还可以知道将有多少减速顶 对被控车组起作用。当编组线安装推送小车时,已知 空闲长度和小车计程,可以判断小车是否接近车辆, 从而确定追车自动转为推送的时机。 (4)长度信息经过一次差分运算,可以获得车组在编组线 内溜放的实际速度,系统借此可以预测车组待停点, 作为后车控制的依据。进一步可以推算车组在编组线 内自由溜放的实际阻力,经过大量数据积累和统计运 算,修改打靶控制数学模型中的参数。 (5)可以推算“天窗”长度(编组线总长度一编组线内存 车数×14.5一测长设备测得的空闲长度),以此决 定机车是否要下峰整理
( 3)编组线内安装减速顶时,还可以知道将有多少减速顶 对被控车组起作用。当编组线安装推送小车时,已知 空闲长度和小车计程,可以判断小车是否接近车辆, 从而确定追车自动转为推送的时机。 ( 4)长度信息经过一次差分运算,可以获得车组在编组线 内溜放的实际速度,系统借此可以预测车组待停点, 作为后车控制的依据。进一步可以推算车组在编组线 内自由溜放的实际阻力,经过大量数据积累和统计运 算,修改打靶控制数学模型中的参数。 ( 5)可以推算“天窗”长度(编组线总长度一编组线内存 车数 x 14 . 5 一测长设备测得的空闲长度),以此决 定机车是否要下峰整理

2.调速系统对测长设备的基本要求 (丨)要有足够的精度测长误差。 在控制难行车时测长误差对系统影响较大。一般测长 误差应在±20m左右,这样的精度对打靶控制系统来说已 不是问题。但在点连式系统中,如果误差太大,侧会影响 对减速顶调速能力的估算;当编组线安装推送小车时,测 长误差将会影响追车时机判断的准确性
2 .调速系统对测长设备的基本要求 ( l)要有足够的精度测长误差。 在控制难行车时测长误差对系统影响较大。一般测长 误差应在±20m 左右,这样的精度对打靶控制系统来说已 不是问题。但在点连式系统中,如果误差太大,则会影响 对减速顶调速能力的估算;当编组线安装推送小车时,测 长误差将会影响追车时机判断的准确性