实验二测试系统静态特性测定 (一)力传感器标定及称重实验 一、实验目的 通过本实验让学生了解用应变片测力环制作电子称进行物品承重,掌握对称重实验台进 行定标和测量误差修正的方法。 二、实验内容和原理 DCZ-A型称重台由应变式力传感器、底座、支架和托盘构成,如图2-1所示。其中, 力传感器由测力环和4个应变片构成的全桥电路组成。当物料加到载物台后,4个应变片会 发生变形,通过电桥放大后产生电压输出。 图21称重实验台结构示意图 DRC☑-A型称重台具有精度高、复现性好的特点。需要特别强调的是:由于力传感器的 过载能力有限(150%),所以,在实际使用过程中应尽量避免用力压传感器的头部或冲击传 感器。否则,极易导致传感器因过载而损坏! 电阻应变片是利用物体线性长度发生变形时其阻值会发生改变的原理制成的,其电阻丝 般用康铜材料,它具有高稳定性及良好的温度、蠕变补偿性能。测量电路普遍采用惠斯通 电桥(如图2-2所示),利用欧姆定律,测试输出量是电压差。 图2-2电阻应变片惠斯通电桥测量电路 本实验采用的电阻应变计采用的是惠斯通全桥电路,当物料加到载物台后,4个应变片 会发生变形,产生电压输出,经采样后送到计算机由DV快速可重组虚拟仪器平台软件处 理。因为电桥在生产时有一些误差,不可能保证每一个电桥的电阻阻值和斜率保持一致。所 0
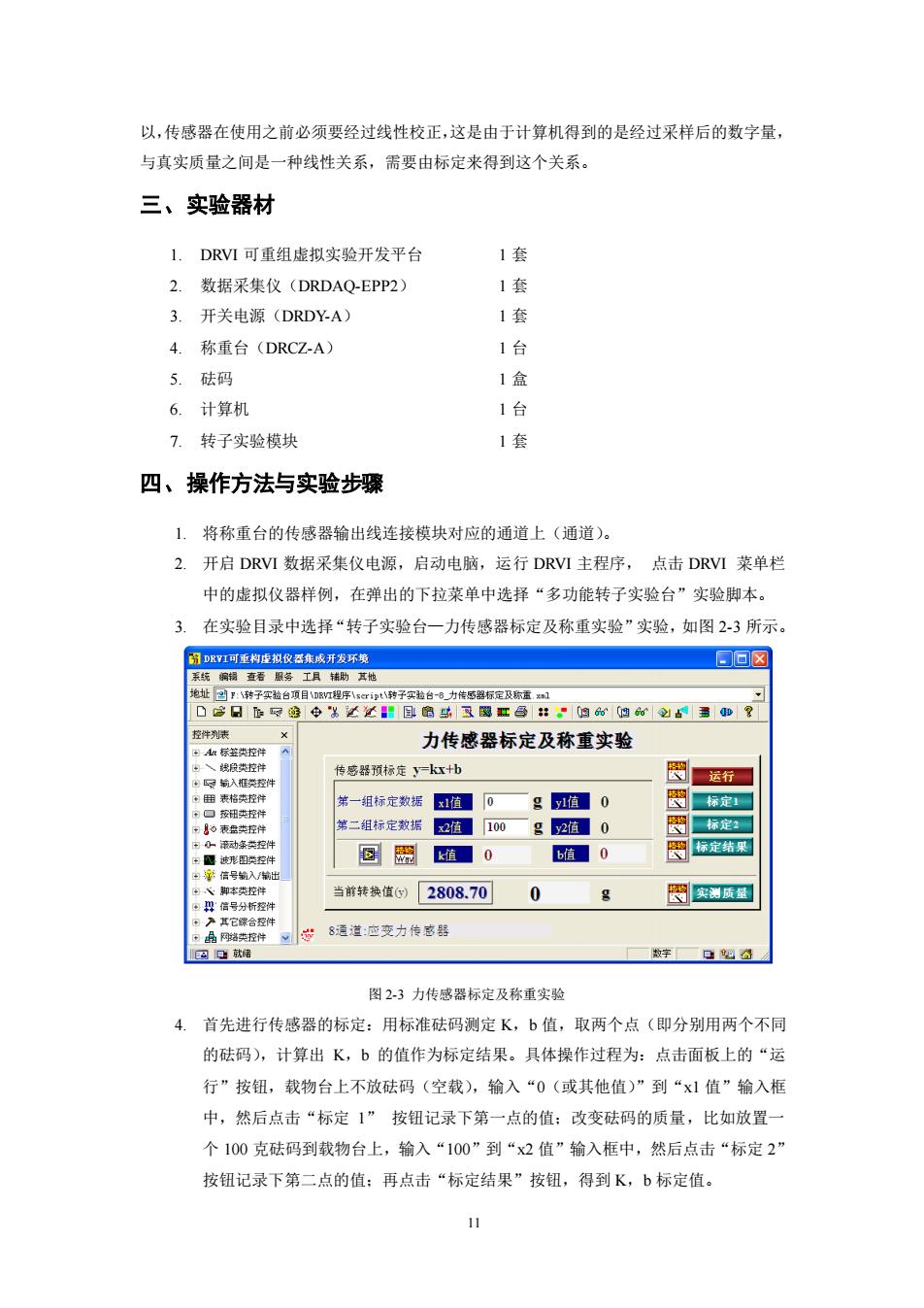
10 实验二 测试系统静态特性测定 (一) 力传感器标定及称重实验 一、实验目的 通过本实验让学生了解用应变片测力环制作电子称进行物品承重,掌握对称重实验台进 行定标和测量误差修正的方法。 二、实验内容和原理 DRCZ-A 型称重台由应变式力传感器、底座、支架和托盘构成,如图 2-1 所示。其中, 力传感器由测力环和 4 个应变片构成的全桥电路组成。当物料加到载物台后,4 个应变片会 发生变形,通过电桥放大后产生电压输出。 图 2-1 称重实验台结构示意图 DRCZ-A 型称重台具有精度高、复现性好的特点。需要特别强调的是:由于力传感器的 过载能力有限(150%),所以,在实际使用过程中应尽量避免用力压传感器的头部或冲击传 感器。否则,极易导致传感器因过载而损坏! 电阻应变片是利用物体线性长度发生变形时其阻值会发生改变的原理制成的,其电阻丝 一般用康铜材料,它具有高稳定性及良好的温度、蠕变补偿性能。测量电路普遍采用惠斯通 电桥(如图 2-2 所示),利用欧姆定律,测试输出量是电压差。 图 2-2 电阻应变片惠斯通电桥测量电路 本实验采用的电阻应变计采用的是惠斯通全桥电路,当物料加到载物台后,4 个应变片 会发生变形,产生电压输出,经采样后送到计算机由 DRVI 快速可重组虚拟仪器平台软件处 理。因为电桥在生产时有一些误差,不可能保证每一个电桥的电阻阻值和斜率保持一致。所
以,传感器在使用之前必须要经过线性校正,这是由于计算机得到的是经过采样后的数字量, 与真实质量之间是一种线性关系,需要由标定来得到这个关系。 三、实验器材 1.DRVI可重组虚拟实验开发平台 1套 2.数据采集仪(DRDAQ-EPP2) 1套 3.开关电源(DRDY-A) 1套 4.称重台(DRCZ-A) 1台 5.砝码 1盒 6.计算机 1台 7.转子实验模块 1套 四、操作方法与实验步骤 1.将称重台的传感器输出线连接模块对应的通道上(通道)。 2.开启DRVI数据采集仪电源,启动电脑,运行DRVI主程序,点击DRVI莱单栏 中的虚拟仪器样例,在弹出的下拉菜单中选择“多功能转子实验台”实验脚本 3 在实验目录中选择“转子实验台一力传感器标定及称重实验”实验,如图23所示 1可重构仪器年成开发环 回回☒ 工具他 力传感器标定及称重实验 感器预标定y一k红 图运轩 笑一组标定数据1值0一g1值0 等扬定 100 g 0 @密值■0 6值■0 图 标定结果 当前转换值2808.70 0 g 图实测质量 8道道:应变力传感 数字 口如公 图23力传感器标定及称重实验 4.首先进行传感器的标定:用标准砝码测定K,b值,取两个点(即分别用两个不同 的砝码),计算出K,b的值作为标定结果。具体操作过程为:点击面板上的“运 行”按钮,载物台上不放砝码(空载),输入“0(或其他值)”到“x1值”输入框 中,然后点击“标定1”按钮记录下第一点的值:改变砝码的质量,比如放置 个100克砝码到载物台上,输入“100”到“x2值”输入框中,然后点击“标定2 按钮记录下第二点的值:再点击“标定结果”按钮,得到K,b标定值。 11
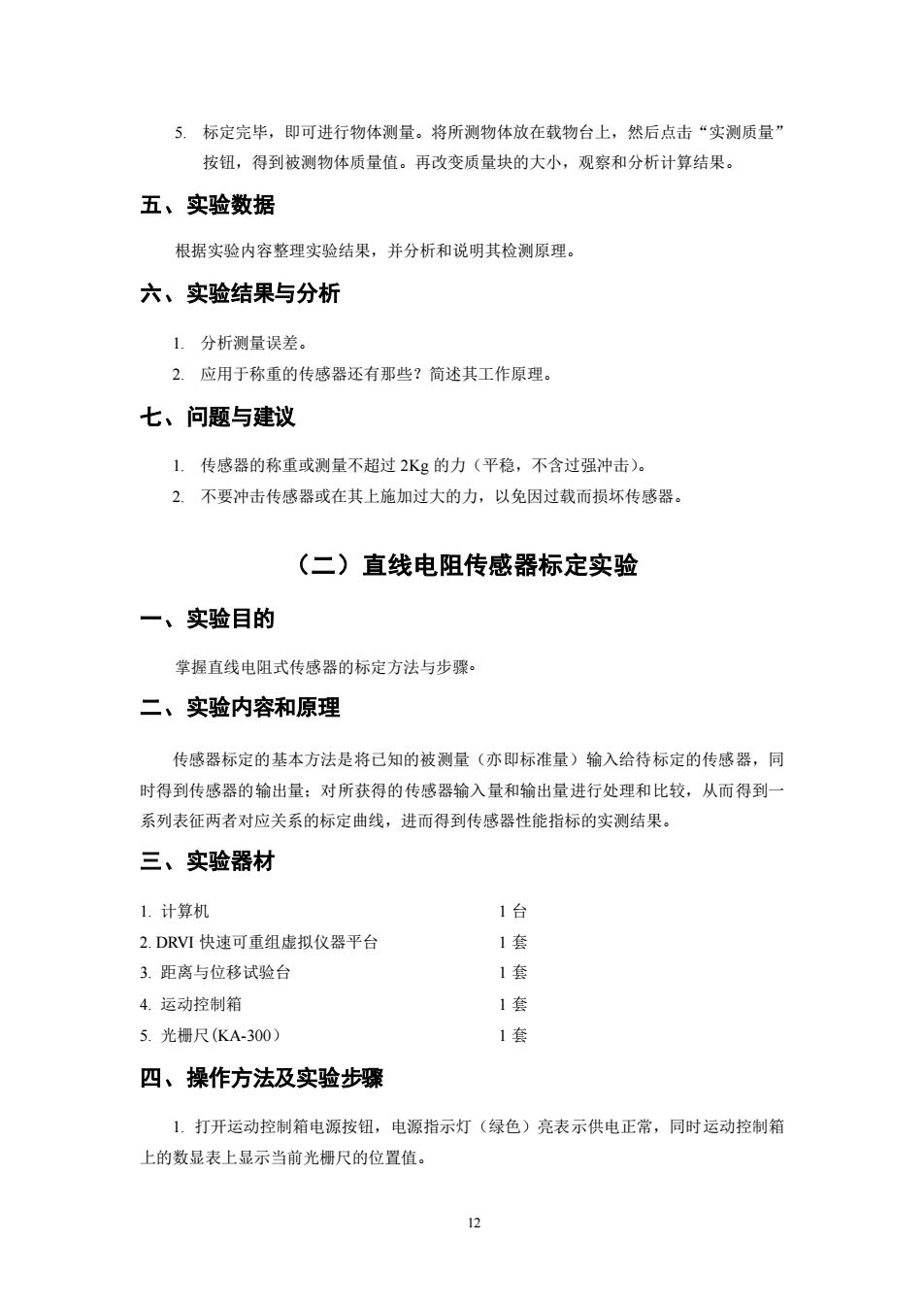
11 以,传感器在使用之前必须要经过线性校正,这是由于计算机得到的是经过采样后的数字量, 与真实质量之间是一种线性关系,需要由标定来得到这个关系。 三、实验器材 1. DRVI 可重组虚拟实验开发平台 1 套 2. 数据采集仪(DRDAQ-EPP2) 1 套 3. 开关电源(DRDY-A) 1 套 4. 称重台(DRCZ-A) 1 台 5. 砝码 1 盒 6. 计算机 1 台 7. 转子实验模块 1 套 四、操作方法与实验步骤 1. 将称重台的传感器输出线连接模块对应的通道上(通道)。 2. 开启 DRVI 数据采集仪电源,启动电脑,运行 DRVI 主程序, 点击 DRVI 菜单栏 中的虚拟仪器样例,在弹出的下拉菜单中选择“多功能转子实验台”实验脚本。 3. 在实验目录中选择“转子实验台—力传感器标定及称重实验”实验,如图 2-3 所示。 图 2-3 力传感器标定及称重实验 4. 首先进行传感器的标定:用标准砝码测定 K,b 值,取两个点(即分别用两个不同 的砝码),计算出 K,b 的值作为标定结果。具体操作过程为:点击面板上的“运 行”按钮,载物台上不放砝码(空载),输入“0(或其他值)”到“x1 值”输入框 中,然后点击“标定 1” 按钮记录下第一点的值;改变砝码的质量,比如放置一 个 100 克砝码到载物台上,输入“100”到“x2 值”输入框中,然后点击“标定 2” 按钮记录下第二点的值;再点击“标定结果”按钮,得到 K,b 标定值
5.标定完毕,即可进行物体测量。将所测物体放在载物台上,然后点击“实测质量 按钮,得到被测物体质量值。再改变质量块的大小,观察和分析计算结果。 五、实验数据 根据实验内容整理实验结果,并分析和说明其检测原理, 六、实验结果与分析 1.分析测量误差。 2.应用于称重的传感器还有那些?简述其工作原理 七、问题与建议 1,传感器的称重或测量不超过2Kg的力(平稳,不含过强冲击)。 2.不要冲击传感器或在其上施加过大的力,以免因过载而损坏传感器 (二)直线电阻传感器标定实验 一、实验目的 掌握直线电阻式传感器的标定方法与步骤。 二、实验内容和原理 传感器标定的基本方法是将己知的被测量(亦即标准量)输入给待标定的传感器,同 时得到传感器的输出量:对所获得的传感器输入量和输出量进行处理和比较,从而得到一 系列表征两者对应关系的标定曲线,进而得到传感器性能指标的实测结果。 三、实验器材 1.计算机 1台 2.DRVI快速可重组虚拟仪器平台 1套 3.距离与位移试验台 1套 4.运动控制箱 1套 5.光栅尺(KA.300 1袋 四、操作方法及实验步骤 1.打开运动控制箱电源按钮,电源指示灯(绿色)亮表示供电正常,同时运动控制箱 上的数显表上显示当前光橱尺的位置值。 2
12 5. 标定完毕,即可进行物体测量。将所测物体放在载物台上,然后点击“实测质量” 按钮,得到被测物体质量值。再改变质量块的大小,观察和分析计算结果。 五、实验数据 根据实验内容整理实验结果,并分析和说明其检测原理。 六、实验结果与分析 1. 分析测量误差。 2. 应用于称重的传感器还有那些?简述其工作原理。 七、问题与建议 1. 传感器的称重或测量不超过 2Kg 的力(平稳,不含过强冲击)。 2. 不要冲击传感器或在其上施加过大的力,以免因过载而损坏传感器。 (二)直线电阻传感器标定实验 一、实验目的 掌握直线电阻式传感器的标定方法与步骤。 二、实验内容和原理 传感器标定的基本方法是将已知的被测量(亦即标准量)输入给待标定的传感器,同 时得到传感器的输出量;对所获得的传感器输入量和输出量进行处理和比较,从而得到一 系列表征两者对应关系的标定曲线,进而得到传感器性能指标的实测结果。 三、实验器材 1. 计算机 1 台 2. DRVI 快速可重组虚拟仪器平台 1 套 3. 距离与位移试验台 1 套 4. 运动控制箱 1 套 5. 光栅尺(KA-300) 1 套 四、操作方法及实验步骤 1. 打开运动控制箱电源按钮,电源指示灯(绿色)亮表示供电正常,同时运动控制箱 上的数显表上显示当前光栅尺的位置值