
机械工程测试技术基础习题集 第一章信号及其描述 1-1求如图1-1所示的周期方波的傅里叶级数(复指数形式),画出c-0和0。-o图, ) 图1-1 1-2求正弦信号x)=osin的绝对均值4,和均方根值xm· 1-3求指数函数x(t)=Ae"(a>0,1之0)的频谱。 14求如图12所示的技截断余弦函数0=人os可/M< 10 的傅里叶变换。 ≥T 图1-2 1-5设有一时间函数f()及其频谱如图1-3所示,现乘以余弦型振荡cos0,t(o。>0), f() () 图1-3
机械工程测试技术基础习题集 第一章 信号及其描述 1-1 求如图 1-1 所示的周期方波的傅里叶级数(复指数形式),画出 cn − 和 n− 图。 1-2 求正弦信号 x(t) x sin t = 0 的绝对均值 x 和均方根值 rms x 。 1-3 求指数函数 ( ) = ( 0, 0) − x t Ae a t at 的频谱。 1-4 求如图 1-2 所示的被截断余弦函数 = t T t t T x t 0 cos ( ) 0 的傅里叶变换。 1-5 设有一时间函数 f (t) 及其频谱如图 1-3 所示,现乘以余弦型振荡 cos ( ) 0 0 m t
在这个关系中,函数∫)叫做调制信号,余弦型振荡c0s0,叫做载波。试求调幅信号 f()cos。1的傅里叶变换,示意画出调幅信号及其频谱。,又问:若。<o时将会出现 什么情况? 1-6求正弦信号x0=xsim(ol+p)的均值4,、均方值w和概率密度函数p(x)
在这个关系中,函数 f (t) 叫做调制信号,余弦型振荡 t 0 cos 叫做载波。试求调幅信号 f t t 0 ( )cos 的傅里叶变换,示意画出调幅信号及其频谱。,又问:若 0 m 时将会出现 什么情况? 1-6 求正弦信号 ( ) sin( ) x t = x0 t + 的均值 x 、均方值 2 x 和概率密度函数 p(x)
第二章测试装置的基本特性 21用一个时间常数为0.35s的一阶装置去测量周期分别为15、2s和5s的正弦信号,问 幅值误差将是多少? 2-2试求周期信号x(0)=0.5cos101+0.2c0s(100-45)通过一个系统传递函数为 @=00O5+的装置后所得到的稳态响位。 2-3想用一个一阶系统作100H正弦信号的测量,如要求限制幅值误差在5%以内,则时间 常数应取多少?若用该系统测试50正弦信号,问此时的振幅误差和相角差是多少? 2-4试说明二阶装置阻尼比5多采用5=(0.6~0.7刀的原因。 25将信号c0s6以输入一个传递函数为H⑤)=云示十的一阶装置后,试求其包搭瞬态过程 在内的输出)的表达式
第二章 测试装置的基本特性 2-1 用一个时间常数为 0.35 s 的一阶装置去测量周期分别为 1 s 、2 s 和 5 s 的正弦信号,问 幅值误差将是多少? 2-2 试求周期 信号 x(t) = 0.5cos10t + 0.2cos(100t − 45) 通过 一个 系统 传递 函数为 0.005 1 1 ( ) + = s H s 的装置后所得到的稳态响应。 2-3 想用一个一阶系统作 100Hz 正弦信号的测量,如要求限制幅值误差在 5%以内,则时间 常数应取多少?若用该系统测试 50Hz 正弦信号,问此时的振幅误差和相角差是多少? 2-4 试说明二阶装置阻尼比 多采用 = (0.6 ~ 0.7) 的原因。 2-5 将信号 cost 输入一个传递函数为 1 1 ( ) + = s H s 的一阶装置后,试求其包括瞬态过程 在内的输出 y(t) 的表达式
第三章常用的传感器 31在机械式传感器中,影响线性度的主要因素是什么?举例说明。 3-2试举出熟悉的五种的机械式传感器,并说明它们的变换原理。 33电阻丝应变片与半导体应变片在工作原理上有何区别?各有何优缺点?应如何针对具 体情况选用? 34电感传感器(自感型)的灵敏度与哪些因素有关?要提高灵敏度可采用哪些措施?采取 这些措施会带来什么样的后果? 35电容式、电感式、电阻应变式传感器的测量电路有何异同?举例说明。 36试按接触式与非接触式区分传感器,列出它们的名称、变换原理和使用场合 37选用传感器的基本原则是什么?在实际中如何运用这些原则?试举例说明
第三章 常用的传感器 3-1 在机械式传感器中,影响线性度的主要因素是什么?举例说明。 3-2 试举出熟悉的五种的机械式传感器,并说明它们的变换原理。 3-3 电阻丝应变片与半导体应变片在工作原理上有何区别?各有何优缺点?应如何针对具 体情况选用? 3-4 电感传感器(自感型)的灵敏度与哪些因素有关?要提高灵敏度可采用哪些措施?采取 这些措施会带来什么样的后果? 3-5 电容式、电感式、电阻应变式传感器的测量电路有何异同?举例说明。 3-6 试按接触式与非接触式区分传感器,列出它们的名称、变换原理和使用场合。 3-7 选用传感器的基本原则是什么?在实际中如何运用这些原则?试举例说明
第四章信号调理、处理与记录 41以阻值R=1202、灵敏度S=2,的电阻丝应变片与阻值为1202的固定电阻组成电 桥,供桥电压为3V,并假定负载电阻为无穷大,当应变片为2s和20004s时,分别求 出单臂、双臂电桥的输出电压,并比较两种情祝下的灵敏度。 42为什么在动态应变仪上除了设有电阻平衡旋钮外,还设有电容平衡旋钮? 4-3已知调幅波 x0)=(100+30cos2I+20cos32r)cos0,1) 其中:6=10k止, =500H 试求:1)x()所包含的各分量的频率及幅值: 2)绘出调制信号与调幅波的频谱。 44什么是滤波器的分辨力?与哪些因素有关? 45已知RC低通滤波器,R=,C=1F,如图4-1所示 试求:1)确定各函数式H(s)、H()、A()、(o): 2)当输入信号4,=10sn10001时,求输出信号“,并比较其幅值及相位关系。 u.G= 图4-1 46已知低通滤器的频率响应函数H)1+r 式中t=0.05s,当输入信号 x()=0.5cos101+0.2cos(100-45)时,求其输出y),并比较y()和x(0的幅值与相 位有何区别
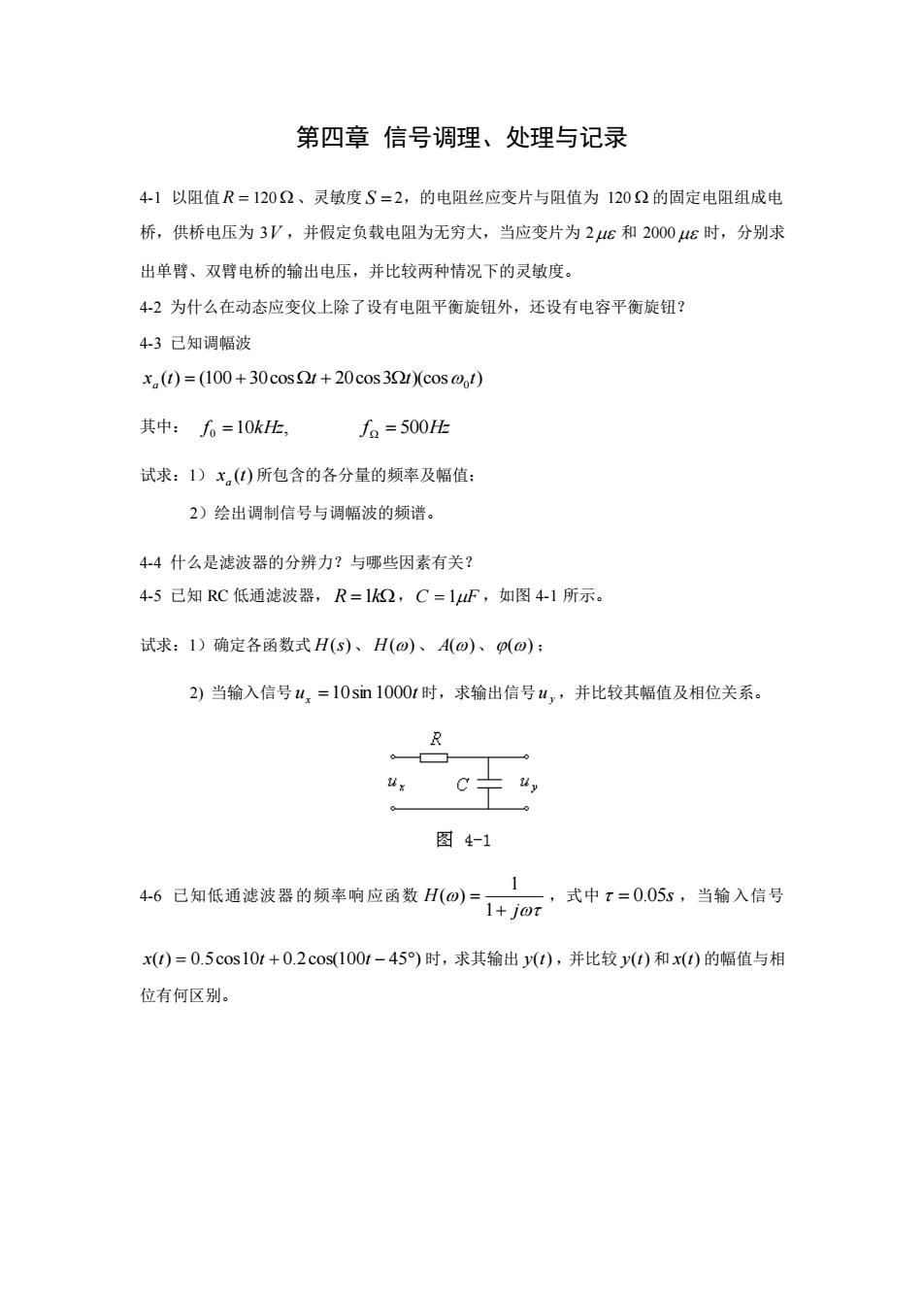
第四章 信号调理、处理与记录 4-1 以阻值 R = 120 、灵敏度 S = 2,的电阻丝应变片与阻值为 120 的固定电阻组成电 桥,供桥电压为 3 V ,并假定负载电阻为无穷大,当应变片为 2 和 2000 时,分别求 出单臂、双臂电桥的输出电压,并比较两种情况下的灵敏度。 4-2 为什么在动态应变仪上除了设有电阻平衡旋钮外,还设有电容平衡旋钮? 4-3 已知调幅波 ( ) (100 30cos 20cos3 )(cos ) 0 x t t t t a = + + 其中: 10 , 0 f = kHz f = 500Hz 试求:1) x (t) a 所包含的各分量的频率及幅值; 2)绘出调制信号与调幅波的频谱。 4-4 什么是滤波器的分辨力?与哪些因素有关? 4-5 已知 RC 低通滤波器, R =1k,C = 1F ,如图 4-1 所示。 试求:1)确定各函数式 H(s) 、 H() 、 A()、() ; 2) 当输入信号 u t x =10sin 1000 时,求输出信号 y u ,并比较其幅值及相位关系。 4-6 已知低通滤波器的频率响应函数 j H + = 1 1 ( ) ,式中 = 0.05s ,当输入信号 x(t) = 0.5cos10t + 0.2cos(100t − 45) 时,求其输出 y(t) ,并比较 y(t) 和 x(t) 的幅值与相 位有何区别