细台形z幸院 antai Institute of Technology 原城台好火维年院 第五章速度和静力 四5.1时变位置和姿态的符号表示 四5.2刚体的线速度和角速度 四5.3机器人连杆的运动 四5.4雅可比矩阵 四5.5机械臂中的静力 2
2 5.1 时变位置和姿态的符号表示 5.2 刚体的线速度和角速度 5.3 机器人连杆的运动 5.4 雅可比矩阵 5.5 机械臂中的静力 第五章 速度和静力
细台程2幸优 antai Institute of Technology 时变位置和姿态的符号表示 原城台好父维年能 >位置失量PQ的微分 BVQ二dt BPo(t+At)-BPo(t) △t-→0 △t 位置失量BPo相对于坐标系B}的微分 0=是 表达在坐标系{A)中 =BRB(BVQ)=BRBVO 当两个坐标系是同一个坐标系时 UVC ORG 坐标系{C}的原点相对于世界参考坐标系的速度
3 时变位置和姿态的符号表示 Ø 位置矢量 的微分 位置矢量 相对于坐标系{B}的微分 表达在坐标系{A}中 当两个坐标系是同一个坐标系时 坐标系{C}的原点相对于世界参考坐标系的速度
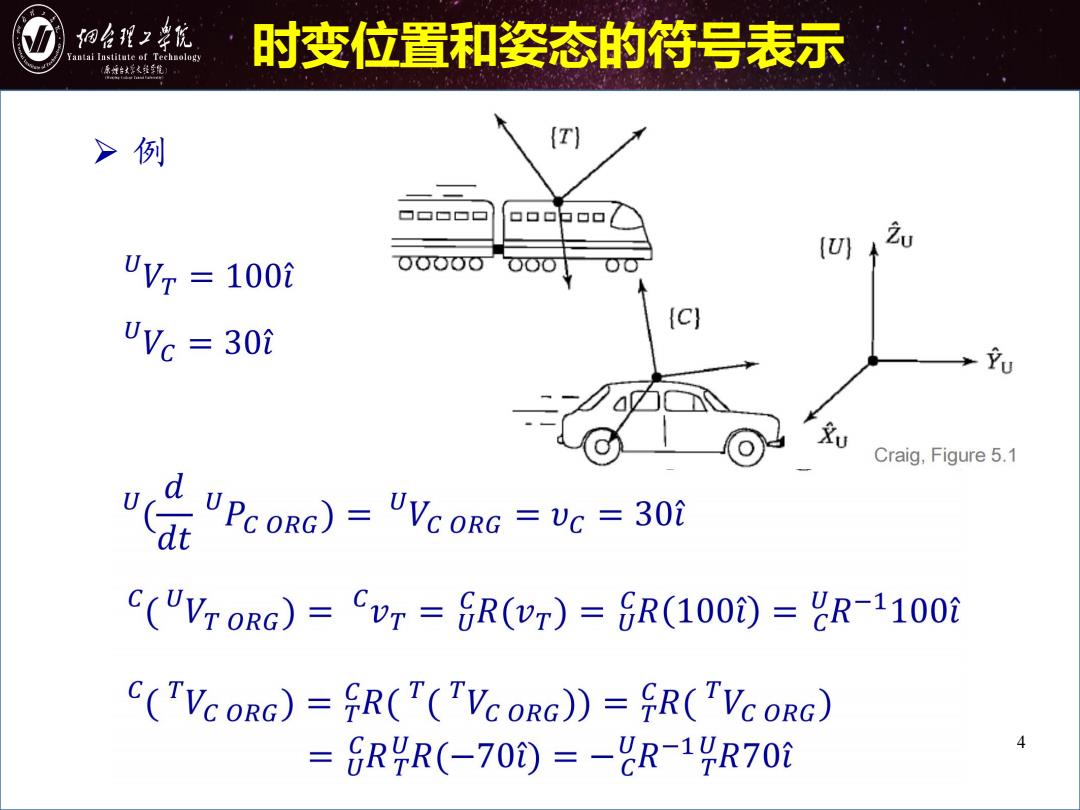
细台程2幸优 antai Institute of Technology 时变位置和姿态的符号表示 原城台好火维年馆 >例 (T □口口口口 (U) 1000 0000o UVc 30i [c] u Craig,Figure 5.1 d UPcORG)=VVeORG-vc=30 v(at C("V7oRG)=Cv7=R(r)=R(100)=&R-1100i C(TVCORG)=fR(T(TVCORG))=fR(VCORG) = SRR(-70)=-光R-14R70i 4
4 时变位置和姿态的符号表示 Ø 例
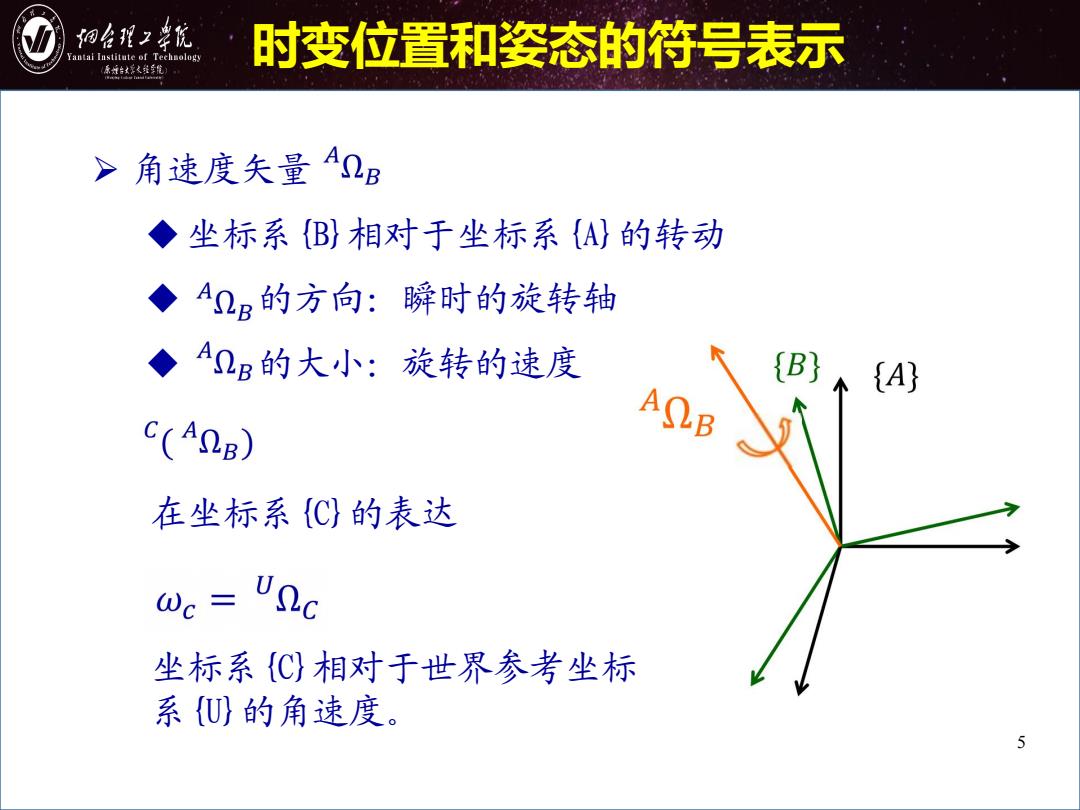
细台程2幸优 antai Institute of Technology 时变位置和姿态的符号表示 原城台家之维能 >角速度夫量A2B ◆坐标系{B)相对于坐标系{A的转动 ◆ A2B的方向:瞬时的旋转轴 A2g的大小:旋转的速度 B {A} C(AOB) 在坐标系(C)的表达 wc USc 坐标系{C)相对于世界参考坐标 系{U}的角速度。 5
5 时变位置和姿态的符号表示 Ø 角速度矢量 u坐标系{B}相对于坐标系{A}的转动 u 的方向:瞬时的旋转轴 u 的大小:旋转的速度 在坐标系{C}的表达 坐标系{C}相对于世界参考坐标 系{U}的角速度
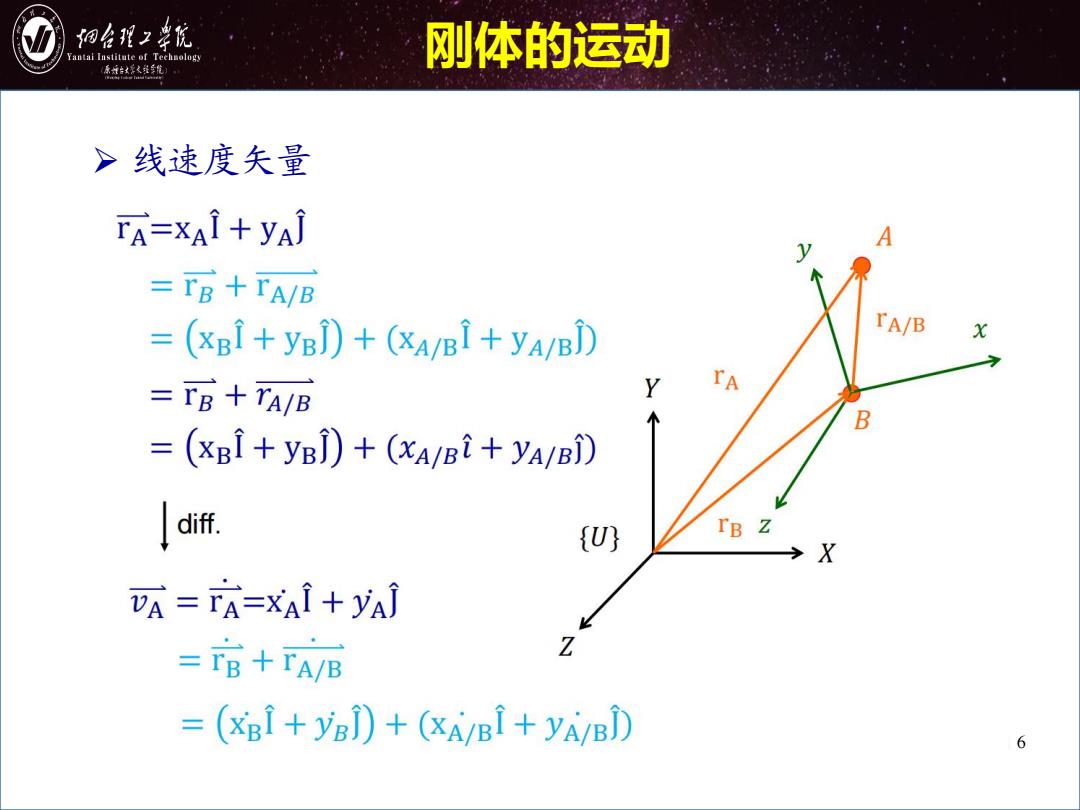
细台形2幸院 antai Institute of Technology 刚体的运动 原城台好火维年馆 >线速度失量 TA=xAI+yAJ A TB TA/B =(xBI+yB])+(XA/Bi+ya/Bj) TA/B X =TB +TA/B Y B =(xBi+yB])+(xa/Bi+yA/Bj) diff. U仍 TB Z X VA TA=XA1+yAJ =亩+TA/B Z =(xBI+yB])+(XA/BI+yA/BJ) 6
6 刚体的运动 Ø 线速度矢量