13机橘扳对解答 13-1 0可通过关系式心一三确定。报子运动的速度 和加速度的计算仍与质点运功学中的计算方法 相. 解因四-,则运动方程 Av 积据震中给出的爱据得 x=()cos[2ay+0.75] 雨子的速度和加速度分别为 p-在1i-4r×10'mg)sm2s'y+0.75网 a-子x/h2--8r2×102mscs2mw+05 rt、t及t图如图13-1所示 132若前谐运动方程为x=0,01m)c20'+引求:()振,危半,同期 初相:(2)12s时的位移、速度和加速度。 代入(战后,即可求得结果。 解(1)将=0.10es2Dr+0.251与-ad+)比较后可得,报相A=0.10 ,角车8=20,制相=025x,则期T-21-01s,领率-1T-10。 (2》=2s时的他移、建度、加建度分别为 x-0.10m)0s40+0.25g1-7.07×102m
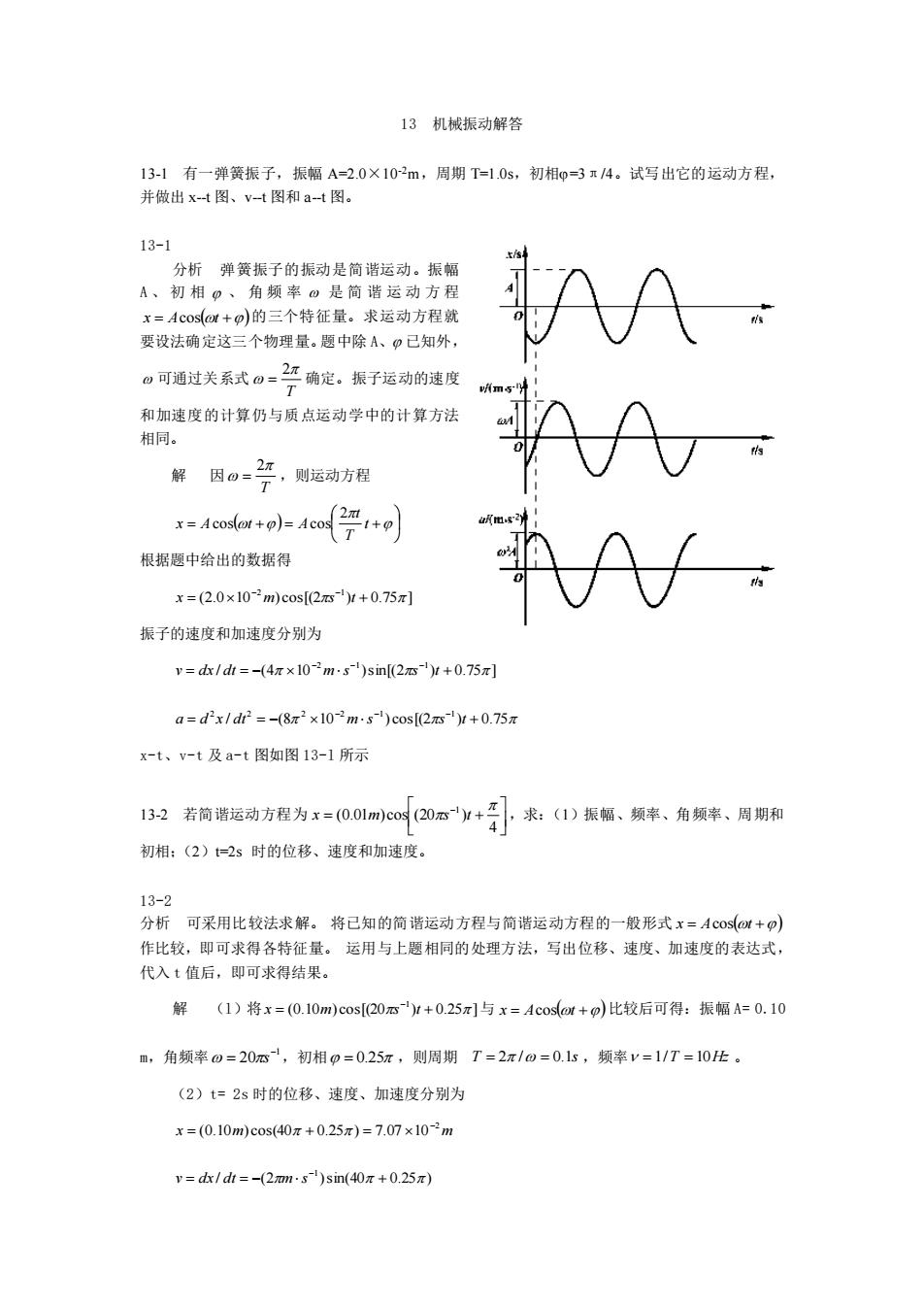
13 机械振动解答 13-1 有一弹簧振子,振幅 A=2.0×10-2m,周期 T=1.0s,初相=3π/4。试写出它的运动方程, 并做出 x--t 图、v--t 图和 a--t 图。 13-1 分析 弹簧振子的振动是简谐运动。振幅 A 、 初 相 、 角 频 率 是 简 谐 运 动 方 程 x = Acos(t +) 的三个特征量。求运动方程就 要设法确定这三个物理量。题中除 A、 已知外, 可通过关系式 T 2 = 确定。振子运动的速度 和加速度的计算仍与质点运动学中的计算方法 相同。 解 因 T 2 = ,则运动方程 ( ) = + = + t T t x A t A 2 cos cos 根据题中给出的数据得 (2.0 10 ) cos[(2 ) 0.75 ] 2 1 = + − − x m s t 振子的速度和加速度分别为 / (4 10 )sin[(2 ) 0.75 ] 2 1 1 = = − + − − − v dx dt m s s t / (8 10 ) cos[(2 ) 0.75 2 2 2 2 1 1 = = − + − − − a d x dt m s s t x-t、v-t 及 a-t 图如图 13-l 所示 13-2 若简谐运动方程为 = + − 4 (0.01 )cos (20 ) 1 x m s t ,求:(1)振幅、频率、角频率、周期和 初相;(2)t=2s 时的位移、速度和加速度。 13-2 分析 可采用比较法求解。 将已知的简谐运动方程与简谐运动方程的一般形式 x = Acos(t +) 作比较,即可求得各特征量。 运用与上题相同的处理方法,写出位移、速度、加速度的表达式, 代入 t 值后,即可求得结果。 解 (l)将 (0.10 ) cos[(20 ) 0.25 ] 1 = + − x m s t 与 x = Acos(t +) 比较后可得:振幅 A= 0.10 m,角频率 1 20 − = s ,初相 = 0.25 ,则周期 T = 2 / = 0.1s ,频率 = 1/T = 10Hz 。 (2)t= 2s 时的位移、速度、加速度分别为 x m m 2 (0.10 ) cos(40 0.25 ) 7.07 10 − = + = / (2 )sin(40 0.25 ) 1 = = − + − v dx dt m s
a=dx/h=-40r2m-g9)6(40x+025x} 133没地绿是一个半径为R的均匀球体,密度P5.5×10kg■”。现假定沿直径带一条隧道, 看有一质量为■的质点在此魔道内做无摩擦运动:《1)正明此质点的运动是商请据动:(2)计算 其周期, 13-3 分析正明方法与上题相叙,分析质点在随道内运动时的受力特任围可, 证《1》取图13-3所示坐标。当质量为■的质点位于1处时,它受地保的明力为 F=-G四m 式中G为引力常量,画,是以玉为半轻的球体频量,即围,=4p3。令素=4Gm3,则顺点受 力 F=-4XGim /3=-kx 因此,质点作简谐话动, 《2)质点量功的周期为 T=2mlk =3/Gp =5.07x10'x 13-4如图所示,两个轻弹簧的动度系数分别为k,和k,物体在光滑料面上振动。(1)证明其 运动仍是简错振动:(2)采系统的振动频率。 0 a ) 13-4
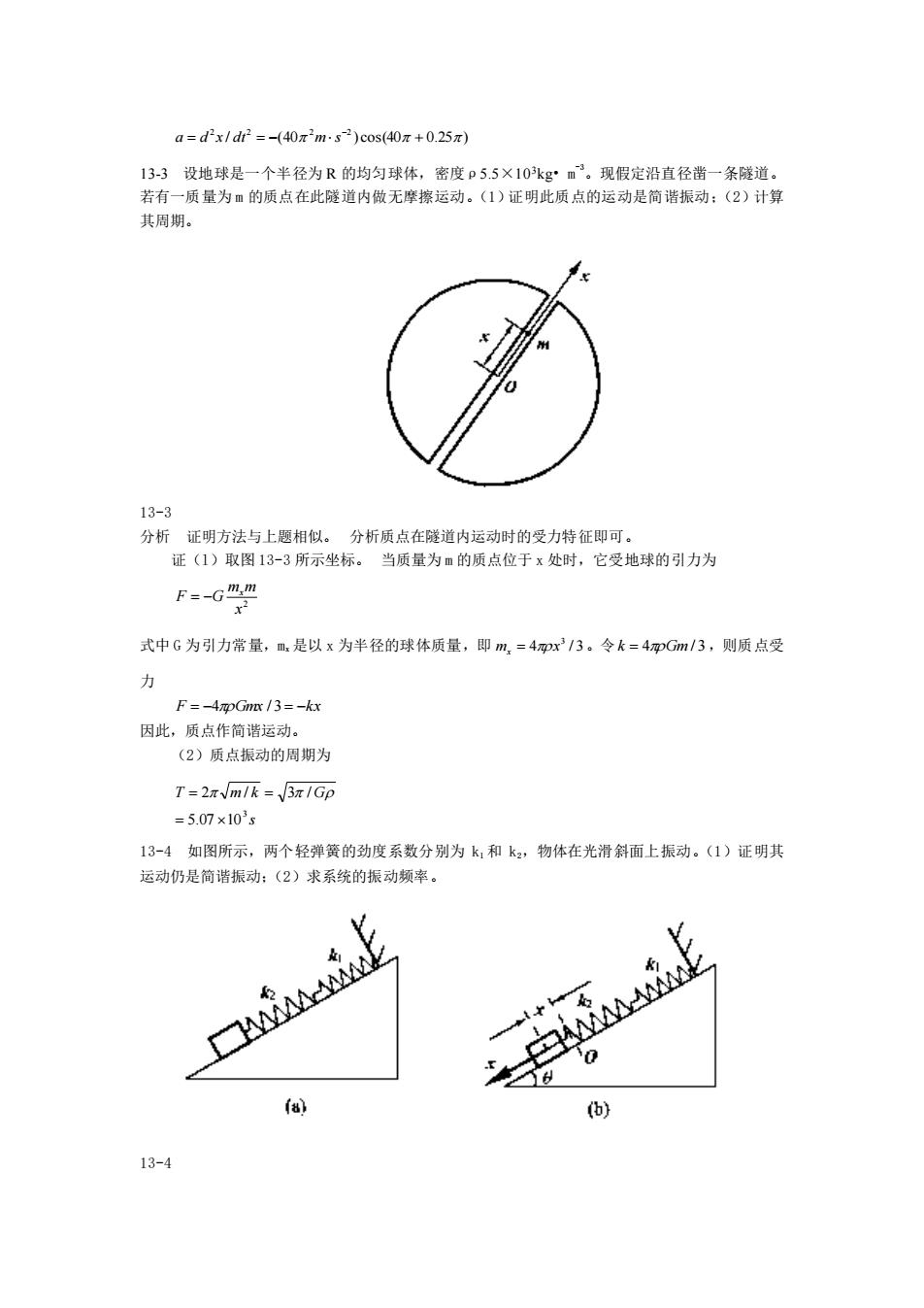
/ (40 ) cos(40 0.25 ) 2 2 2 2 = = − + − a d x dt m s 13-3 设地球是一个半径为 R 的均匀球体,密度ρ5.5×103kg• m -3。现假定沿直径凿一条隧道。 若有一质量为 m 的质点在此隧道内做无摩擦运动。(1)证明此质点的运动是简谐振动;(2)计算 其周期。 13-3 分析 证明方法与上题相似。 分析质点在隧道内运动时的受力特征即可。 证(l)取图 13-3 所示坐标。 当质量为 m 的质点位于 x 处时,它受地球的引力为 2 x m m F G x = − 式中 G 为引力常量,mx 是以 x 为半径的球体质量,即 4 / 3 3 m x x = 。令 k = 4Gm / 3 ,则质点受 力 F = −4Gmx / 3 = −kx 因此,质点作简谐运动。 (2)质点振动的周期为 s T m k G 3 5.07 10 2 / 3 / = = = 13-4 如图所示,两个轻弹簧的劲度系数分别为 k1 和 k2,物体在光滑斜面上振动。(1)证明其 运动仍是简谐振动;(2)求系统的振动频率。 13-4
分析从上两愿的零解知道,要旺明一个系统作简谐运动,首先要分析受力情况,然后看是否端 足简请运动的受力特征《或简谐运动微分方程.为此,建立如图13-4《6)所示的坐标。设 系统平衡时物体所在位置为坐标原点0,0x轴正向沿斜面向下,由受力分新可知,沿0x轴,物 体受弹性力及重力分力的作用,其中弹性力是变力。利用串颗时各弹簧受力相等。分析物体在 任一位置时受力与位移的关系,即可正得物体作箭谐运动,并可求出绳率。 证设物体平衡时两弹簧伸长分别为,:则由物体受力平衡,有 gsn0=k=k高 按图()所取坐标,物体沿x轴移动位移x时,两弹簧又分别枝拉伸'和',即x=无+': 则物体受力为 F=限sn8-k(馬1+无)=wsnB-k(馬+高) 将式(1)代人式(2)得 下=k=-k 由式(3)得=-F/h、=-下/气,而x=+x。则得到 F■-kkk+k灯■-红 式中=,人风人+k》为觉数,则物体作简请运动,振动频率 -a2-名-立帖+6m 讨论(1)由本题的求证可知,斜面领角对弹簧是否作简诱运动以及量动的顿率均不产生 影响。事实上,无论弹簧水平放置、斜置还是极直是挂,物体均作前萧运动。面且可以证明它 们的期零相同。均由弹簧振子的国有性质决定,这就是称为固有频率的原因。(2)如零振动系 统如图13-4(©》(弹簧并联)或如图13-4(d)所示,也可通过物体在某一位置的受力分析得出 其作简谐运功,且佩功频常均为= 244 e d 读者可以一试。通过这些例子可以知道,证明物体是否作简请运动的思路是相同的 135为了测得一物体得质量m,将其挂在一弹簧上让其白由振动。测得振动顿率片=10比。 而将另一质量w一0幼g的物体单独挂在该弹簧上时,测得振动频率一20壮。设据动均在弹 需的弹性限度内走行,求被测物体的质量。 13-6 分析物体挂在弹簧上组成弹责扳子系统。其银动顿率=、需,即x网。采用比较 须常?的方法可求出来知物体的质量, 解由分析可知,Px√m,则有叫华一√侧/网。根据题中给指的数据可得物体的质
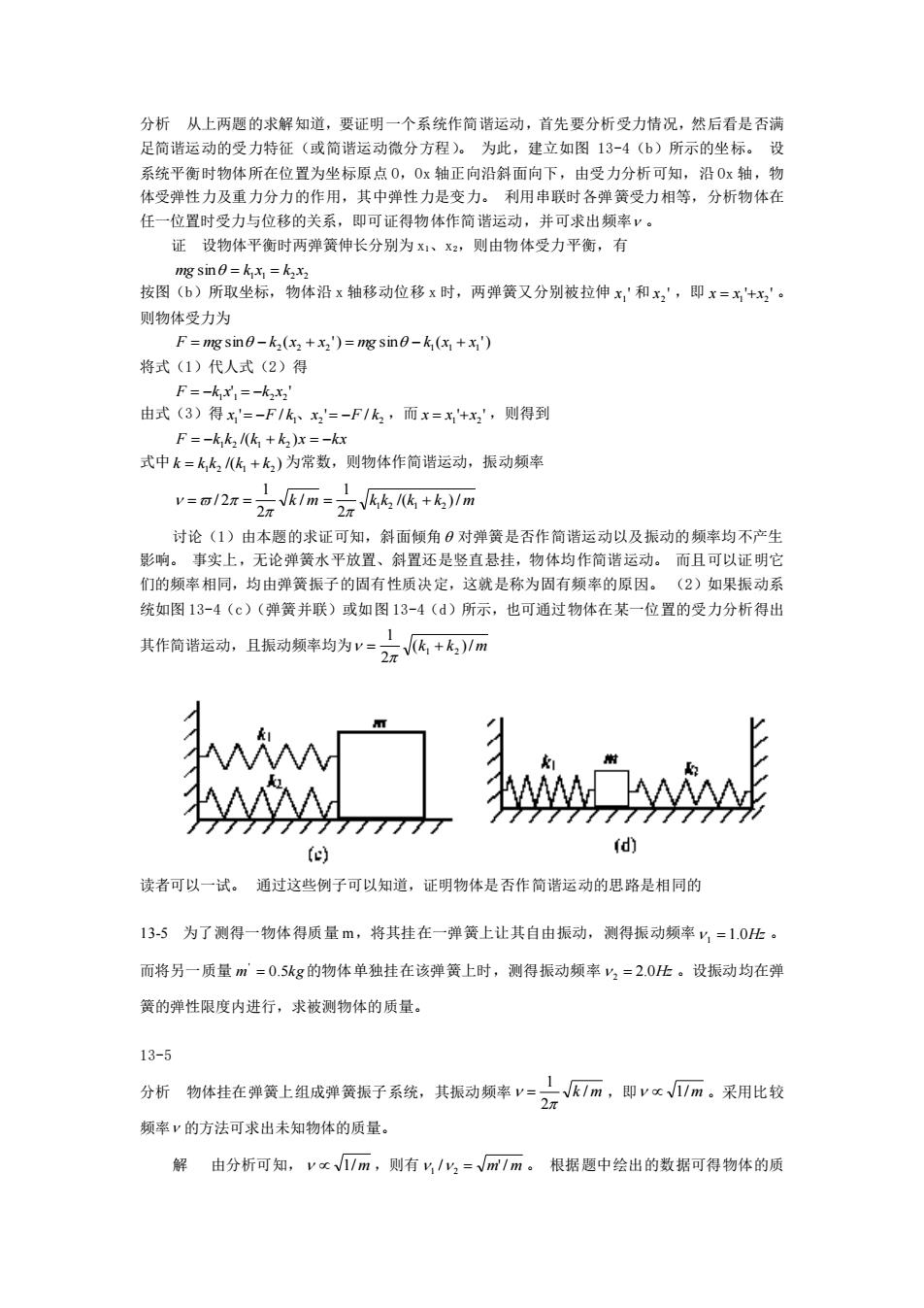
分析 从上两题的求解知道,要证明一个系统作简谐运动,首先要分析受力情况,然后看是否满 足简谐运动的受力特征(或简谐运动微分方程)。 为此,建立如图 13-4(b)所示的坐标。 设 系统平衡时物体所在位置为坐标原点 O,Ox 轴正向沿斜面向下,由受力分析可知,沿 Ox 轴,物 体受弹性力及重力分力的作用,其中弹性力是变力。 利用串联时各弹簧受力相等,分析物体在 任一位置时受力与位移的关系,即可证得物体作简谐运动,并可求出频率 。 证 设物体平衡时两弹簧伸长分别为 x1、x2,则由物体受力平衡,有 1 1 2 2 mg sin = k x = k x 按图(b)所取坐标,物体沿 x 轴移动位移 x 时,两弹簧又分别被拉伸 ' 1 x 和 ' 2 x ,即 ' ' 1 2 x = x +x 。 则物体受力为 sin ( ') sin ( ') 2 2 2 1 1 1 F = mg − k x + x = mg − k x + x 将式(1)代人式(2)得 ' ' 1 1 2 2 F = −k x = −k x 由式(3)得 1 1 2 2 x ' = −F / k、x ' = −F / k ,而 ' ' 1 2 x = x +x ,则得到 F = −k k /(k + k )x = −kx 1 2 1 2 式中 /( ) 1 2 1 2 k = k k k + k 为常数,则物体作简谐运动,振动频率 k m k k /(k k )/ m 2 1 / 2 1 = / 2 = = 1 2 1 + 2 讨论(1)由本题的求证可知,斜面倾角 对弹簧是否作简谐运动以及振动的频率均不产生 影响。 事实上,无论弹簧水平放置、斜置还是竖直悬挂,物体均作简谐运动。 而且可以证明它 们的频率相同,均由弹簧振子的固有性质决定,这就是称为固有频率的原因。 (2)如果振动系 统如图 13-4(c)(弹簧并联)或如图 13-4(d)所示,也可通过物体在某一位置的受力分析得出 其作简谐运动,且振动频率均为 (k k )/m 2 1 = 1 + 2 读者可以一试。 通过这些例子可以知道,证明物体是否作简谐运动的思路是相同的 13-5 为了测得一物体得质量 m,将其挂在一弹簧上让其自由振动,测得振动频率 1.0Hz 1 = 。 而将另一质量 m 0.5kg ' = 的物体单独挂在该弹簧上时,测得振动频率 2.0Hz 2 = 。设振动均在弹 簧的弹性限度内进行,求被测物体的质量。 13-5 分析 物体挂在弹簧上组成弹簧振子系统,其振动频率 k / m 2 1 = ,即 1/m 。采用比较 频率 的方法可求出未知物体的质量。 解 由分析可知, 1/m ,则有 1 / 2 = m'/ m 。 根据题中绘出的数据可得物体的质
量为 周=时(5/)2-20k家 136在如图所示的装置中,一动度系数为k的弹簧。一端固定在塘上,另一编连接一质量为 m,的物体A,置于光滑水平桌面上。现通过一质量为m、半径为R的定滑轮B(可棍为匀质圆 盘)用细绳连接另一质量为一:的物体C,设细绳不可种长,且与滑轮间无相对滑动,象系统的 探动角频事。 13-6 分析这是一个由弹簧、物体A、C和滑轮B粗成的简语运动系统。求解系统的雨动频事 可采用两种方法。(1)从受力分析着手。如图13-6()所示,设系统处于平衡状态时,与 物体A相连的弹簧一端所在位置为坐标原点0,此时弹簧已种长:且气=网g。当弹爵沿0: 轴正向从原点D钟长x时,分析物体A,及滑轮B的受力情况,并分别列出它们的动力学方程, 可解得系统作简谐运动的微分方程。(2》从系统机械能守恒看于。列出系统机械能守恒方程, 然后求得系绕作简谐运动的做分方程。 e 解1在图13-6(6)的状志下,各物棒受力如图13-5(c)所示。其中F=-Mx+F。 考虑到绳子不可伸长,对物体A,B,分别方程,有 dx B,-+)=m (1 典82-偶 (20 39 作-FnR-e-号m (3) 气思8 (4) 方程(3)中用到了Fn=F,'、F:=F:'./=成2,及a=g/R。联立式(1)-式(4) 可得
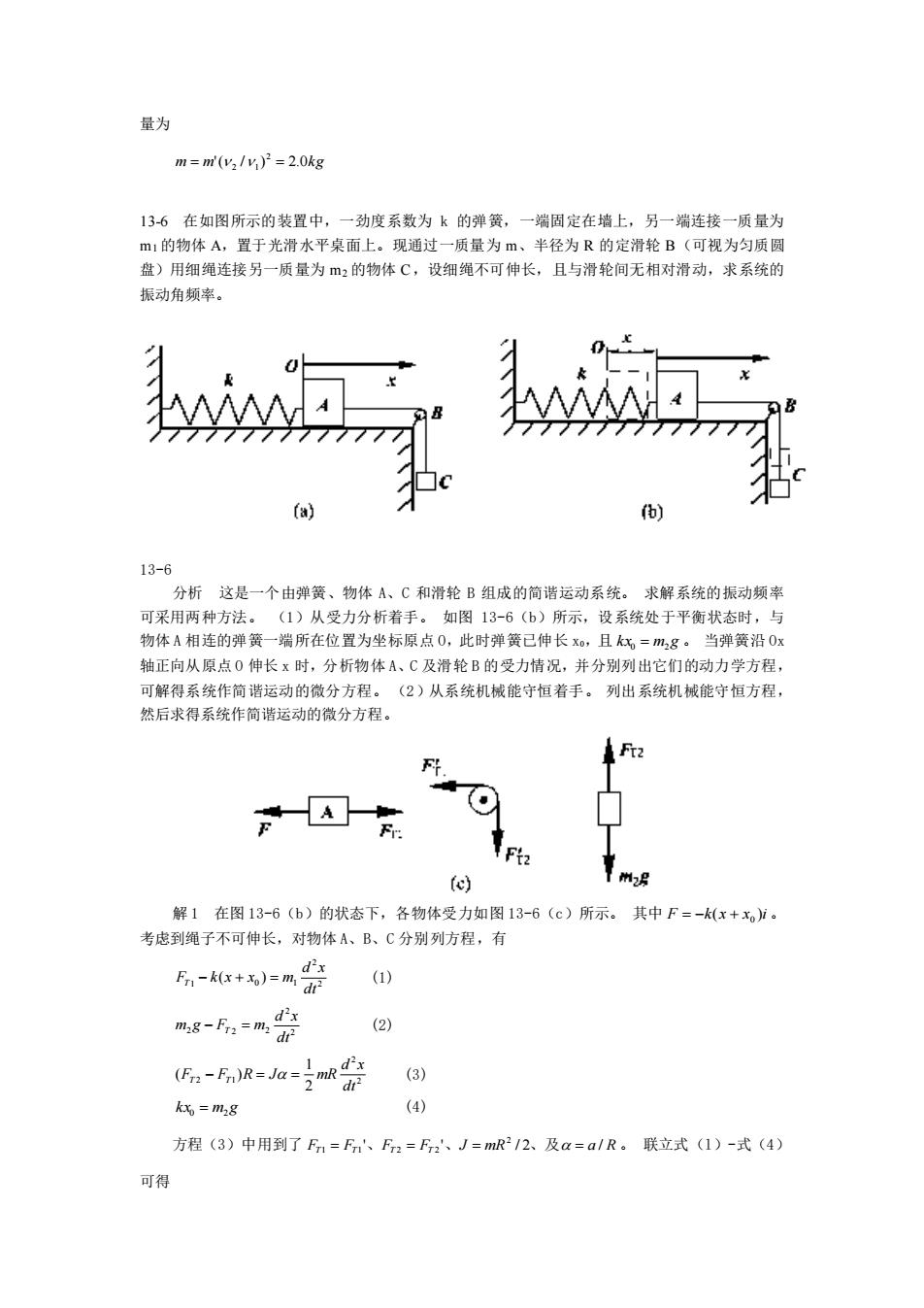
量为 m m'( / ) 2.0k g 2 = 2 1 = 13-6 在如图所示的装置中,一劲度系数为 k 的弹簧,一端固定在墙上,另一端连接一质量为 m1 的物体 A,置于光滑水平桌面上。现通过一质量为 m、半径为 R 的定滑轮 B(可视为匀质圆 盘)用细绳连接另一质量为 m2 的物体 C,设细绳不可伸长,且与滑轮间无相对滑动,求系统的 振动角频率。 13-6 分析 这是一个由弹簧、物体 A、C 和滑轮 B 组成的简谐运动系统。 求解系统的振动频率 可采用两种方法。 (1)从受力分析着手。 如图 13-6(b)所示,设系统处于平衡状态时,与 物体 A 相连的弹簧一端所在位置为坐标原点 O,此时弹簧已伸长 x0,且 kx0 = m2 g 。 当弹簧沿 Ox 轴正向从原点 O 伸长 x 时,分析物体 A、C 及滑轮 B 的受力情况,并分别列出它们的动力学方程, 可解得系统作简谐运动的微分方程。 (2)从系统机械能守恒着手。 列出系统机械能守恒方程, 然后求得系统作简谐运动的微分方程。 解 1 在图 13-6(b)的状态下,各物体受力如图 13-6(c)所示。 其中 F k(x x )i = − + 0 。 考虑到绳子不可伸长,对物体 A、B、C 分别列方程,有 2 2 1 0 1 ( ) dt d x FT − k x + x = m (1) 2 2 2 2 2 dt d x m g − FT = m (2) 2 2 2 1 2 1 ( ) dt d x FT − FT R = J = mR (3) kx0 = m2 g (4) 方程(3)中用到了 FT FT ' FT FT ' J mR / 2 a / R 2 1 = 1 、 2 = 2 、 = 、及 = 。 联立式(l)-式(4) 可得

dx 网+隔+2-0 则系统氟动的角频事为 四三√km+网3+m/2) 解2取整个量动装置和地球为研究系统,国没有外力和非保守内力作功,系统机械能守恒。 设物体平衡时为初始代志,物体向右偏移距离X(此时速度为对?·如速度为)为末状老,则 由机板能守恒定律,有 现+广公2+红+ 2 在列出上述方程时应注意势能《重力势能和弹性势伦》罗点的选取。为运算方便,选初始状古 下物体C所在位置为重力势能零点:弹簧原长时为弹性势能的零点。将上述方程对时间求导得 0=-偶gT+偶 +周 +a +制x+离月 h 将J-m/2.成-h/山-dx/r和Lg=k代人上式,可得 式(6》与式(5)相同,表明再种解法结果一致, 17-7一成置在水平桌面上的弹簧最子。佩幅A-20×102m周用T05054当0时,(1)物体 在正方向端点:(2)物体在平衡位置向负方向国动:(3)物体在3x-10×10m处,向负方向运 动:(4)物体在x■-1,0×102m处,向正方向运动。求以上各种情况的运动方程。 13-7 分析在板幅A和周期T已知的条件下,确定初相中是求解简语运动方程的关键。初相的确定通 常有两种方法。(1)解析法由振动方程出发,根据初始条件,即”0时,x无和v三,米 确定e值。(2)旋转失量法:如图13-7《a)所示,将质点P在0轴上据动的橱如位置x 和速度的方向与旋转失量图相对应米确定单,旋转天量法比较直观、方便,在分析中常采用: 解由圆给条件知A=20x10团,可一2x/T=4西,而初相e可采用分析中的两种不同 方法来观。 解法:根据简话超动方程x■AG+),当t■0时有玉=As9,0==A国sn停。 当
0 1 2 / 2 2 2 = + + + x m m m k dt d x 则系统振动的角频率为 /( / 2) = k m1 + m2 + m 解 2 取整个振动装置和地球为研究系统,因没有外力和非保守内力作功,系统机械能守恒。 设物体平衡时为初始状态,物体向右偏移距离 X(此时速度为对 v 、加速度为 a)为末状态,则 由机械能守恒定律,有 2 0 2 2 2 2 2 1 2 0 ( ) 2 1 2 1 2 1 2 1 2 1 k x = −m gx + m v + m v + J + k x + x 在列出上述方程时应注意势能(重力势能和弹性势能)零点的选取。 为运算方便,选初始状态 下物体 C 所在位置为重力势能零点;弹簧原长时为弹性势能的零点。 将上述方程对时间求导得 2 2 1 2 0 0 k(x x ) dt dv J dt dv m v dt dv = −m gv + m v + + + + 将 2 0 2 2 2 J = mR / 2、R = v、dv / dt = d x / dt 和m g = k x 代人上式,可得 0 1 2 / 2 2 2 = + + + x m m m k dt d x 式(6)与式(5)相同,表明两种解法结果一致。 17-7 一放置在水平桌面上的弹簧振子,振幅 A=2.0×10-2m,周期 T=0.50s。当 t=0 时,(1)物体 在正方向端点;(2)物体在平衡位置向负方向运动;(3)物体在..x=1.0×10-2m 处,向负方向运 动;(4)物体在..x= -1.0×10-2m 处,向正方向运动。求以上各种情况的运动方程。 13-7 分析 在振幅 A 和周期 T 已知的条件下,确定初相中是求解简谐运动方程的关键。初相的确定通 常有两种方法。(1)解析法:由振动方程出发,根据初始条件,即 t= 0 时, x= xo 和 0 v = v 来 确定 值。 (2)旋转矢量法:如图 13-7(a)所示,将质点 P 在 Ox 轴上振动的初始位置 x0 和速度 v0 的方向与旋转矢量图相对应来确定 。 旋转矢量法比较直观、方便,在分析中常采用。 解 由题给条件知 A m 2 2.0 10− = , 1 2 / 4 − = T = s ,而初相 可采用分析中的两种不同 方法来求。 解析法:根据简谐运动方程 x = Acos(t +) ,当 t=0 时有 x0 = Acos ,v0 = −A sin 。 当