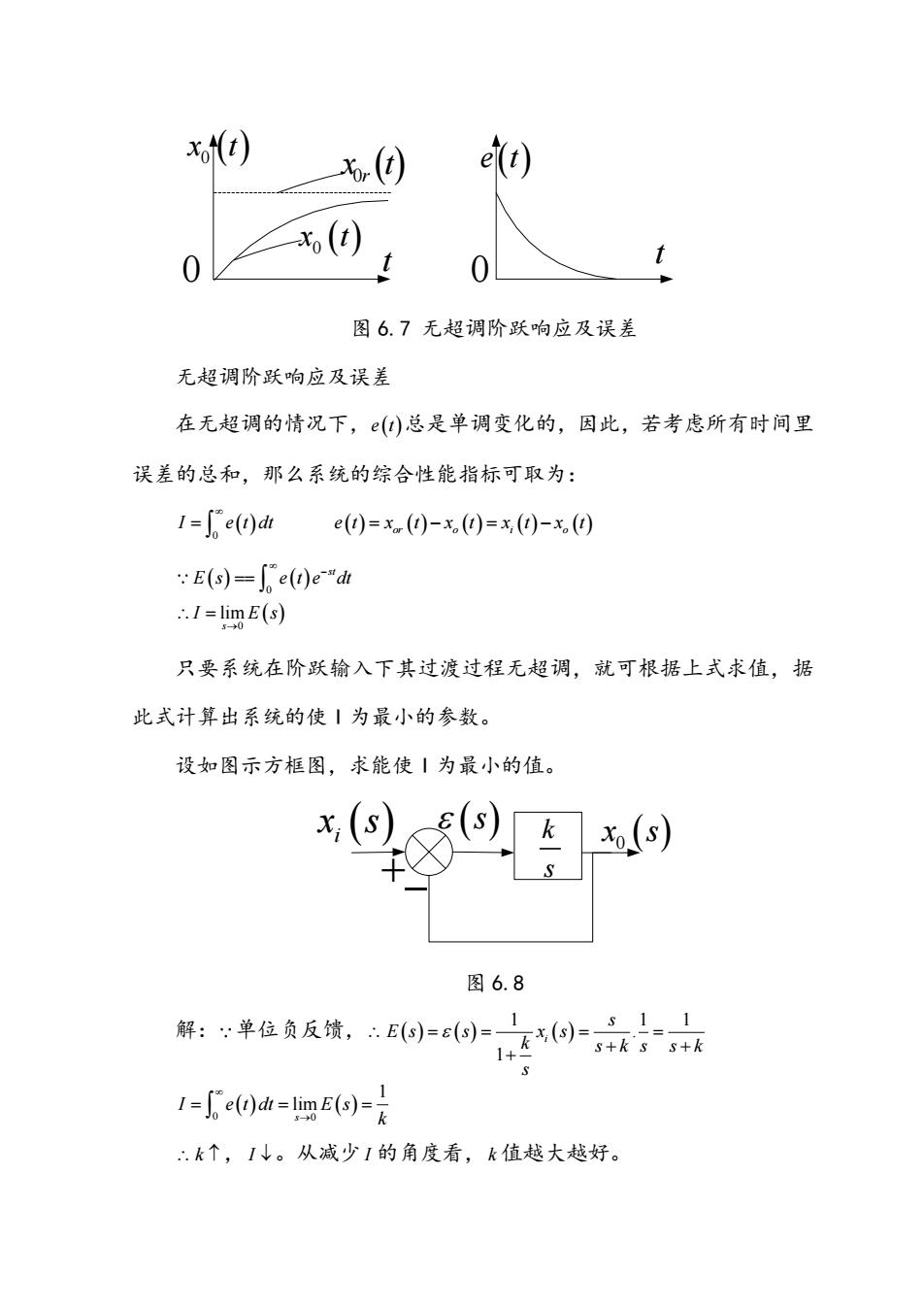
xo(t) t) x() 04 0 图6.7无超调阶跃响应及误差 无超调阶跃响应及误差 在无超调的情况下,()总是单调变化的,因此,若考虑所有时间里 误差的总和,那么系统的综合性能指标可取为: 1=0dhe0=x()-x0=x0-x0 :E(s)=[e(t)e-"dt :.I=limE(s) 只要系统在阶跃输入下其过渡过程无超调,就可根据上式求值,据 此式计算出系统的使丨为最小的参数。 设如图示方框图,求能使1为最小的值。 x(s)(5)) 图6.8 解单我反线。0-0甘动 1=e0h=g)-是 k↑,1↓。从减少1的角度看,k值越大越好
x t 0r x t 0 t x t 0 0 0 t e t 图 6.7 无超调阶跃响应及误差 无超调阶跃响应及误差 在无超调的情况下, e t 总是单调变化的,因此,若考虑所有时间里 误差的总和,那么系统的综合性能指标可取为: 0 I e t dt e t x t x t x t x t or o i o 0 0 lim st s E s e t e dt I E s 只要系统在阶跃输入下其过渡过程无超调,就可根据上式求值,据 此式计算出系统的使 I 为最小的参数。 设如图示方框图,求能使 I 为最小的值。 k s x s i s x s 0 图 6.8 解: 单位负反馈, 1 1 1 . 1 i s E s s x s k s k s s k s 0 0 1 lim s I e t dt E s k k ,I 。从减少 I 的角度看, k 值越大越好
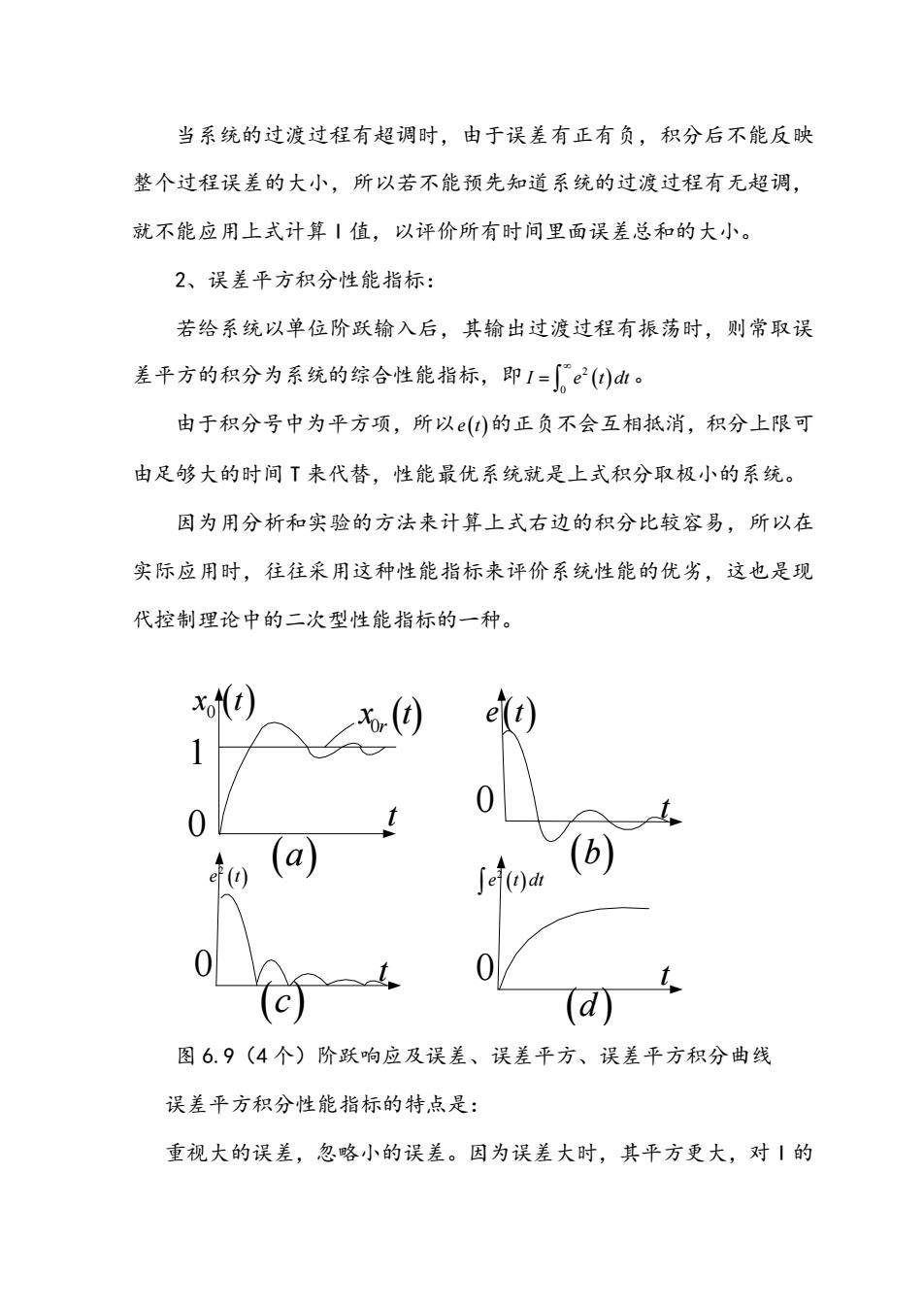
当系统的过渡过程有超调时,由于误差有正有负,积分后不能反映 整个过程误差的大小,所以若不能预先知道系统的过渡过程有无超调 就不能应用上式计算〡值,以评价所有时间里面误差总和的大小。 2、误差平方积分性能指标: 若给系统以单位阶跃输入后,其输出过渡过程有振荡时,则常取误 差平方的积分为系统的综合性能指标,即1=∫e()d。 由于积分号中为平方项,所以()的正负不会互相抵消,积分上限可 由足够大的时间T来代替,性能最优系统就是上式积分取极小的系统。 因为用分析和实验的方法来计算上式右边的积分比较容易,所以在 实际应用时,往往采用这种性能指标来评价系统性能的优劣,这也是现 代控制理论中的二次型性能指标的一种。 xt) 0 0 (b) 0 c d 图6.9(4个)阶跃响应及误差、误差平方、误差平方积分曲线 误差平方积分性能指标的特点是: 重视大的误差,忽略小的误差。因为误差大时,其平方更大,对〡的
当系统的过渡过程有超调时,由于误差有正有负,积分后不能反映 整个过程误差的大小,所以若不能预先知道系统的过渡过程有无超调, 就不能应用上式计算 I 值,以评价所有时间里面误差总和的大小。 2、误差平方积分性能指标: 若给系统以单位阶跃输入后,其输出过渡过程有振荡时,则常取误 差平方的积分为系统的综合性能指标,即 2 0 I e t dt 。 由于积分号中为平方项,所以 e t 的正负不会互相抵消,积分上限可 由足够大的时间 T 来代替,性能最优系统就是上式积分取极小的系统。 因为用分析和实验的方法来计算上式右边的积分比较容易,所以在 实际应用时,往往采用这种性能指标来评价系统性能的优劣,这也是现 代控制理论中的二次型性能指标的一种。 x t 0r x t 0 t 0 0 t e t 1 0 t 2 e t 0 t 2 e t dt a b c d 图 6.9(4 个)阶跃响应及误差、误差平方、误差平方积分曲线 误差平方积分性能指标的特点是: 重视大的误差,忽略小的误差。因为误差大时,其平方更大,对 I 的
影响大,所以根据这种指标设计的系统,能使大的误差迅速减小,但系 统易产生振荡 3、广义误差平方积分性能指标 取:1=e)+ae回u α→给定的加权系数 所以最优系统就是使此性能指标/取极小的系统 此指标的特点是既不允许大的动态误差)长期存在,又不允许大的 误差变化率e()长期存在。 所以按此准则设计的系统,不仅过渡过程结束得快,且过渡过程的变 化也较平稳
影响大,所以根据这种指标设计的系统,能使大的误差迅速减小,但系 统易产生振荡。 3、广义误差平方积分性能指标 取: ' 2 2 0 I e t e t dt 给定的加权系数 所以最优系统就是使此性能指标 I 取极小的系统 此指标的特点是既不允许大的动态误差 e t 长期存在,又不允许大的 误差变化率 ' e t 长期存在。 所以按此准则设计的系统,不仅过渡过程结束得快,且过渡过程的变 化也较平稳
§6.2系统的校正 性能指标通常是由控制系统的用户提出。一个具体系统对指标的要 求应有所侧重,如调速系统对平稳性和稳态精度要求严格,而随动系统 对快速性期望很高。 性能指标的提出要有根据,不能脱离实际的可能性,比如要求响应快, 则必须有足够好的能量供给系统和能量转化系统,以保证运动部件具有 较好的加速度,运动部件要能承受产生的离心载荷和惯性载荷等。性能 指标决定于系统的设计水平和工艺水平。此外,由于它的性能指标常需 要昂贵的元件,因此成本高。 另一方面,几个性能指标的要求也经常互相矛盾。例如,减小系统的 稳态误差往往会降低系统的相对稳定性,甚至导致系统不稳定。在这种 情况下,就要考虑哪个性能时主要的,首先加以满足:有时,在另一些 情况下就要采取折中的方案,并加上必要的校正,使两方面的性能都能 得到部分满足。 一、校正的概念: 所谓校正(或称补偿调节),就是指在系统中增加新的环节,以改善系 统的性能的方法。 -1.d b
§6.2 系统的校正 性能指标通常是由控制系统的用户提出。一个具体系统对指标的要 求应有所侧重,如调速系统对平稳性和稳态精度要求严格,而随动系统 对快速性期望很高。 性能指标的提出要有根据,不能脱离实际的可能性,比如要求响应快, 则必须有足够好的能量供给系统和能量转化系统,以保证运动部件具有 较好的加速度,运动部件要能承受产生的离心载荷和惯性载荷等。性能 指标决定于系统的设计水平和工艺水平。此外,由于它的性能指标常需 要昂贵的元件,因此成本高。 另一方面,几个性能指标的要求也经常互相矛盾。例如,减小系统的 稳态误差往往会降低系统的相对稳定性,甚至导致系统不稳定。在这种 情况下,就要考虑哪个性能时主要的,首先加以满足;有时,在另一些 情况下就要采取折中的方案,并加上必要的校正,使两方面的性能都能 得到部分满足。 一、校正的概念: 所谓校正(或称补偿调节),就是指在系统中增加新的环节,以改善系 统的性能的方法。 m I R e ① ② ③ 2 1, jo 0 1 ' k jo , 0 k jo , ① w1 w w2 w 0 1 1, jo a b

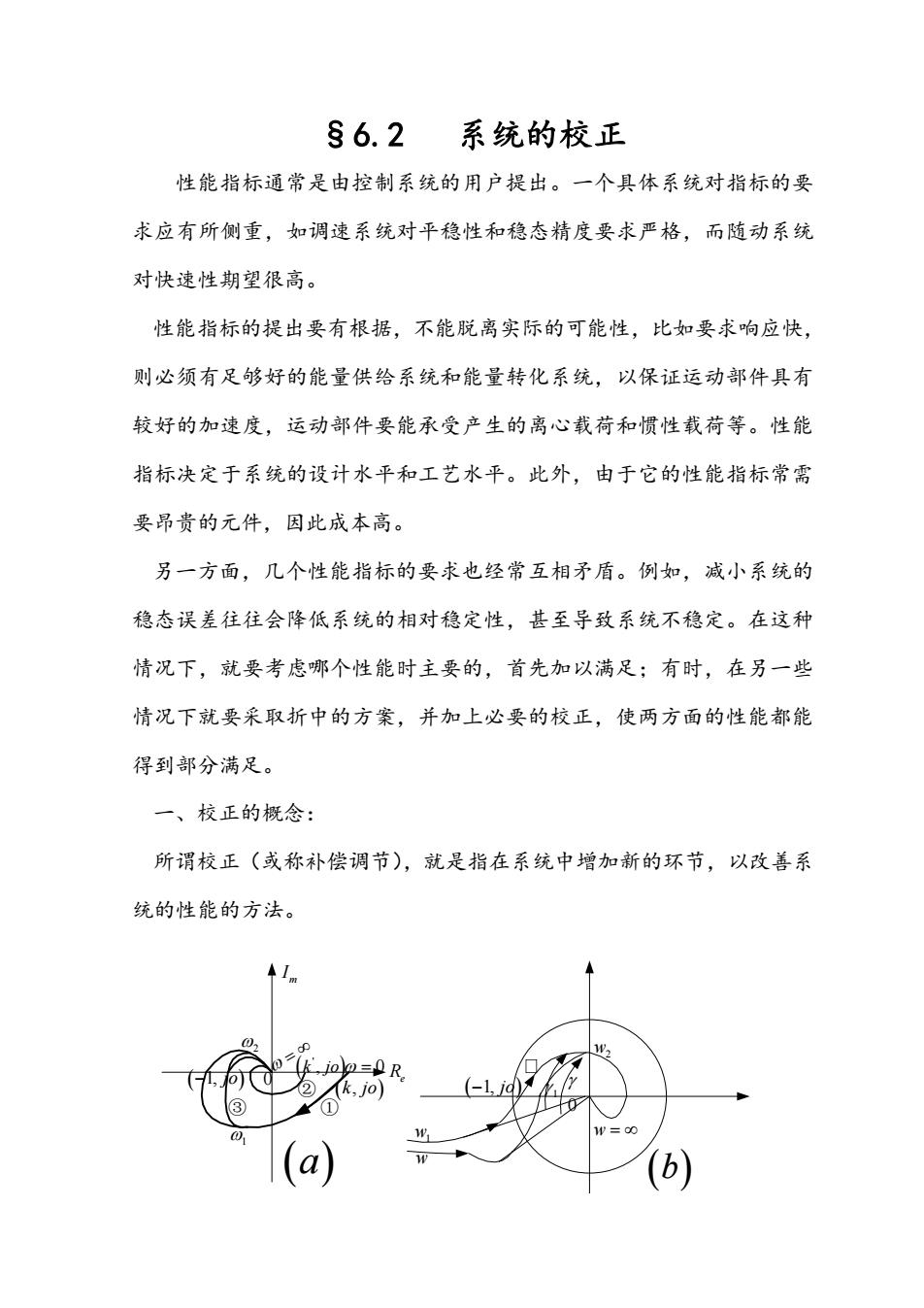
例:如图6.10.a k G.)F+Ts0+7s0+T网 (p=0) 为图中①,包围点(-1,j),所以系统不稳定 改进:「①k↓→k→图中②,稳定,但.↑,不希望甚至不允许 (②增加新环节,图中③w→w,发生变化,稳定 不改变k,不增大e.。 图6.10.b (p=0),稳定,但相位裕度y↓ 改进:①k↓,y无变化,无改善。 ②加入新环节,使曲线→②,%→w,间产生正的相移,y↑,得 到改善。 由上可知:从频率法德观点来看,增加新的环节,主要是改变系统的 频率特性。对系统品质指标的要求,最终可归结为对系统开环频率特性 的要求。系统设计的实质就是利用校正装置对系统开环Bode图进行整形。 要求它①在低频区(w<"),提供尽可能高的增益,e.↓,达到以最小 的误差跟踪输入; ②在中频区(Ψ=w附近),表征闭环系统的动态性能,限制幅 频特性曲线,k=-20dB/dc左右,以保证系统的稳定性(r和k。), 使系统具有良好的动态性能。 ③在高频区(w>w),表征系统的复杂性及噪声抑制性能,高频 增益应尽可能小,开环幅频特性尽可能快的衰减,以减少高频 噪声对系统的千扰。若原有高频段已符合要求,则校正时可保
例:如图 6.10.a 1 1 1 1 2 3 k k G s T s T s T s p 0 为图中①,包围点 1, jo ,所以系统不稳定 改进:① k k 图中②,稳定,但 ss e ,不希望甚至不允许 ②增加新环节,图中③ w w 1 2 发生变化,稳定 不改变 k ,不增大 ss e 。 图 6.10.b p 0 ,稳定,但相位裕度 改进:① k , 无变化,无改善。 ②加入新环节,使曲线 ②, w w 1 2 间产生正的相移, ,得 到改善。 由上可知:从频率法德观点来看,增加新的环节,主要是改变系统的 频率特性。对系统品质指标的要求,最终可归结为对系统开环频率特性 的要求。系统设计的实质就是利用校正装置对系统开环 Bode 图进行整形。 要求它①在低频区( w w c ),提供尽可能高的增益, ss e ,达到以最小 的误差跟踪输入; ②在中频区( w w c 附近),表征闭环系统的动态性能,限制幅 频特性曲线, k dB dec 20 / 左右,以保证系统的稳定性( r 和 g k ), 使系统具有良好的动态性能。 ③在高频区( w w c ),表征系统的复杂性及噪声抑制性能,高频 增益应尽可能小,开环幅频特性尽可能快的衰减,以减少高频 噪声对系统的干扰。若原有高频段已符合要求,则校正时可保