回程相对应的凸轮转角,称为回程运动角8。(motion angle for return travle)。可以看出,回程是 从动件移向凸轮轴心的行程。 5.近休止和近休止角 凸轮继续转动公时,凸轮轮廓DA段的向径不变,此时从动件在最近位置停留不动,称为 近休止,相应的凸轮转角云称为近休止角。 当凸轮再继续转动时,从动件重复上述运动循环。因凸轮作匀速转动,其转角6与时间1成 正比(6=),此时若以直角坐标系的纵坐标代表从动件位移s,横坐标代表凸轮的转角6, 则可画出从动件位移s与凸轮转角6之间的关系线图,如图5-6b所示,这种曲线则称为从动件 位移曲线,也可用它来描述从动件的运动规律。 从动件的运动规律是指其坛动参数(位移s、谏度和加谏度)随时间·变化的规律,常 用运动线图来表示。此时从动件的运动规律也可用从动件的运动参数随凸轮转角的变化规律来表 示,即s=s(6),v=v(6),a=a(6)。 由上述分析可知,从动件位移曲线取决于凸轮轮廓曲线的形状。反之,要设计凸轮的轮廓 曲线,则必须首先知道从动件的运动规律。 5.2从动件运动规律 5.2.1从动件常用运动规律 根据从动件运动规律所用数学表达式的不同,常用的主要有多项式运动规律和三角函数运动 规律两大类,下面分别加以介绍。 1.多项式运动规律 多项式函数具有高阶导数的连续性,因此在凸轮机构从动件运动规律的设计中得到了广泛的 应用。用多项式表示的从动件位移方程的一般形式为 s=Co+C6+C262+…+C.8m (5-1) 式中,6为凸轮转角:s为从动件位移:C。、C,、、C。分别为待定系数:n为多项式的次数。 可根据对从动件运动规律的具体要求,提出+1个边界条件代入上式,求出待定系数C。、C,、 C。,进而推导出多项式运动规律。 1)一次多项式运动规律(n=1) 设凸轮以等角速度o转动,凸轮的推程运动角为6。,从动件的行程为h,由式(5-1)可知, 一次多项式运动规律的表达式为 81
81 回程相对应的凸轮转角,称为回程运动角 0 ' (motion angle for return travle)。可以看出,回程是 从动件移向凸轮轴心的行程。 5.近休止和近休止角 凸轮继续转动 ' S 时,凸轮轮廓 DA 段的向径不变,此时从动件在最近位置停留不动,称为 近休止,相应的凸轮转角 ' S 称为近休止角。 当凸轮再继续转动时,从动件重复上述运动循环。因凸轮作匀速转动,其转角 与时间 t 成 正比( = t ),此时若以直角坐标系的纵坐标代表从动件位移 s,横坐标代表凸轮的转角 , 则可画出从动件位移 s 与凸轮转角 之间的关系线图,如图 5-6b 所示,这种曲线则称为从动件 位移曲线,也可用它来描述从动件的运动规律。 从动件的运动规律是指其运动参数(位移 s、速度 v 和加速度 a)随时间 t 变化的规律,常 用运动线图来表示。此时从动件的运动规律也可用从动件的运动参数随凸轮转角的变化规律来表 示,即 s = s( ) , v = v( ), a = a( )。 由上述分析可知,从动件位移曲线取决于凸轮轮廓曲线的形状。反之,要设计凸轮的轮廓 曲线,则必须首先知道从动件的运动规律。 5.2 从动件运动规律 5.2.1 从动件常用运动规律 根据从动件运动规律所用数学表达式的不同,常用的主要有多项式运动规律和三角函数运动 规律两大类,下面分别加以介绍。 1. 多项式运动规律 多项式函数具有高阶导数的连续性,因此在凸轮机构从动件运动规律的设计中得到了广泛的 应用。用多项式表示的从动件位移方程的一般形式为 n s C C C Cn 2 = 0 + 1 + 2 ++ (5-1) 式中, 为凸轮转角; s 为从动件位移; C0 、C1 、…、Cn 分别为待定系数; n 为多项式的次数。 可根据对从动件运动规律的具体要求,提出 n+1 个边界条件代入上式,求出待定系数 C0 、C1 、…、 Cn ,进而推导出多项式运动规律。 1)一次多项式运动规律( n =1 ) 设凸轮以等角速度 转动,凸轮的推程运动角为 0 ,从动件的行程为 h ,由式(5-1)可知, 一次多项式运动规律的表达式为
=Co+C6 Co (5-2) 假设边界条件为:在始点处,6=0,s=0:在终点处,6=6。,s=h。代入式(5-2)得C。=0, C=川6。,故从动件推程的运动方程为 V= ho (5-3) a=0 同理,根据回程时的边界条件:6=0,s=h:6=6。,s=0(其中6。为回程运动角)。代 入式(5-2)可得C。=h,C=-,故从动件回程的运动方程为 (5-4) a=0 注意:计算边界条件时,凸轮的转角6总是从该运动过程的起始位置起计量。 由于一次多项式函数的一阶导数为常数,所以此时从动件作匀速运动,故又称匀速运动规律 (constant velocity motion curve)。图5-7所示为其推程段的等速运动线图。由图可知,从动件在 运动开始和终止的瞬间,速度有突变,所以这时从动件在理论上将产生无穷大的加速度和惯性力, 因而会使凸轮机构受到极大的冲击。这种由于加速度无穷大而产生的冲击称为刚性冲击(gd impulse)。当然,由于实际凸轮机构中构件的弹性、阻尼等因素作用,惯性力不可能无穷大。因 此,等速运动规律通常只适用于低速轻载的场合,或对从动件有实现等速运动要求的场合,如图 5-2所示的自动机床的进刀凸轮机构。 2)二次多项式运动规律(n=2) 二次多项式的表达式为 82
82 = = = = = + 0 d d d d 1 0 1 t v a C t s v s C C (5-2) 假设边界条件为:在始点处, = 0 ,s = 0 ;在终点处, = 0 ,s = h 。代入式(5-2)得 C0 = 0 , 1 0 C = h ,故从动件推程的运动方程为 = = = 0 0 0 a h v h s (5-3) 同理,根据回程时的边界条件: = 0 , s = h ; ' = 0 ,s = 0 (其中 ' 0 为回程运动角)。代 入式(5-2)可得 C0 = h , ' C1 = −h 0 ,故从动件回程的运动方程为 = = − = − 0 1 ' 0 ' 0 a h v s h (5-4) 注意:计算边界条件时,凸轮的转角 总是从该运动过程的起始位置起计量。 由于一次多项式函数的一阶导数为常数,所以此时从动件作匀速运动,故又称匀速运动规律 (constant velocity motion curve)。图 5-7 所示为其推程段的等速运动线图。由图可知,从动件在 运动开始和终止的瞬间,速度有突变,所以这时从动件在理论上将产生无穷大的加速度和惯性力, 因而会使凸轮机构受到极大的冲击。这种由于加速度无穷大而产生的冲击称为刚性冲击(rigid impulse)。当然,由于实际凸轮机构中构件的弹性、阻尼等因素作用,惯性力不可能无穷大。因 此,等速运动规律通常只适用于低速轻载的场合,或对从动件有实现等速运动要求的场合,如图 5-2 所示的自动机床的进刀凸轮机构。 2)二次多项式运动规律( n = 2 ) 二次多项式的表达式为
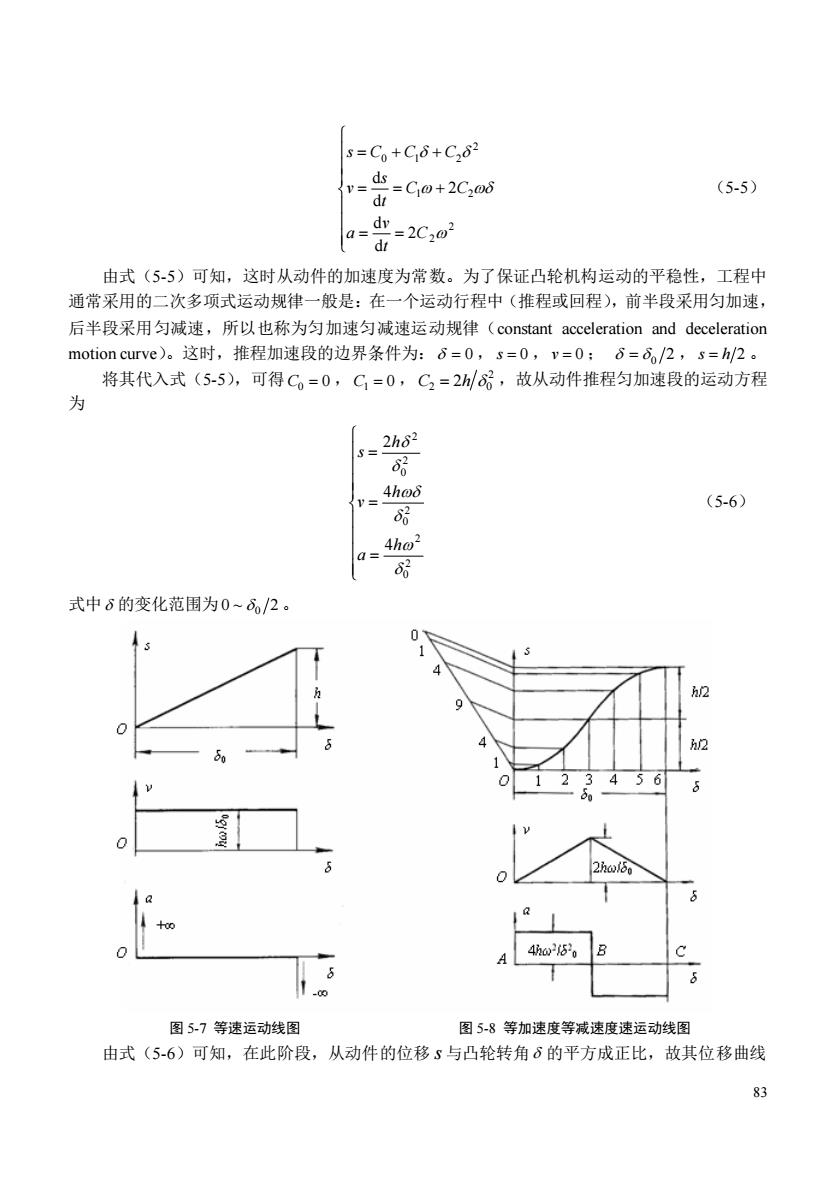
s=C。+C6+C,62 v-ds-Co+2C.00 (5-5) d d业=2C20 由式(5-5)可知,这时从动件的加速度为常数。为了保证凸轮机构运动的平稳性,工程中 通常采用的二次多项式运动规律一般是:在一个运动行程中(推程或回程),前半段采用匀加速, 后半段采用匀减速,所以也称为匀加速匀减速运动规律(constant acceleration and deceleration motion curve)。这时,推程加速段的边界条件为:6=0,s=0,v=0:6=d。2,s=h/2。 将其代入式(5-5),可得C=0,C=0,C2=2h/,故从动件推程匀加速段的运动方程 s=2h82 (5-6) a=4ho? 式中6的变化范围为0~6/2 h/2 图57等速运动线图 图5-8等加速度等减速度速运动线图 由式(5-6)可知,在此阶段,从动件的位移5与凸轮转角6的平方成正比,故其位移曲线
83 = = = = + = + + 2 2 1 2 2 0 1 2 2 d d 2 d d C t v a C C t s v s C C C (5-5) 由式(5-5)可知,这时从动件的加速度为常数。为了保证凸轮机构运动的平稳性,工程中 通常采用的二次多项式运动规律一般是:在一个运动行程中(推程或回程),前半段采用匀加速, 后半段采用匀减速,所以也称为匀加速匀减速运动规律(constant acceleration and deceleration motion curve)。这时,推程加速段的边界条件为: = 0 , s = 0 ,v = 0 ; = 0 2 ,s = h 2 。 将其代入式(5-5),可得 C0 = 0 ,C1 = 0 , 2 C2 = 2h 0 ,故从动件推程匀加速段的运动方程 为 = = = 2 0 2 2 0 2 0 2 4 4 2 h a h v h s (5-6) 式中 的变化范围为 0 ~ 0 2 。 图 5-7 等速运动线图 图 5-8 等加速度等减速度速运动线图 由式(5-6)可知,在此阶段,从动件的位移 s 与凸轮转角 的平方成正比,故其位移曲线
为图5-10所示的一段向上凹的抛物线。 推程匀减速段的边界条件为:6=6/2,s=h2:6=d,s=h,v=0。将其代入式(S-5) 可得C=-h,G=4h/6。,C2=-2h。故从动件推程匀减速段的运动方程为 she (8-6) (5-7) 4ho? a=- 式中的变化范围为6.2~6。这时,从动件的位移曲线为图5-8所示的位移曲线上一段向下凹的 抛物线,两段反向抛物线在中点处光滑相连,故匀加速匀减速运动规律又称为抛物线运动规律 (parabolic motion curve). 由图5-8可知,加速度曲线上A、B、C三点的加速度为一有限值突变,因而引起的冲击 较小或较柔和,故称为柔性冲击(s0mpuc).。但在高速情况下仍将导致严重的振动、噪声和 磨损,所以这种运动规律只适用于中、低速轻载的工况。 同理,根据回程中的边界条件,可得回程时等加速等减速运动规律的运动方程为 回程匀加速段: s=h- 2h82 v-- 4ho8 05854 (5-8) as. 4ho? 回程匀减速段: 2h6- S= 6 V= -she (8,-6) (5-9) a= 3)五次多项式运动规律(n=5) 五次多项式的表达式为
84 为图 5-10 所示的一段向上凹的抛物线。 推程匀减速段的边界条件为: = 0 2 ,s = h 2 ; = 0 ,s = h ,v = 0 。将其代入式(5-5) 可得 C0 = −h , 1 0 C = 4h , 2 C2 = − 2h 0 。故从动件推程匀减速段的运动方程为 = − = − = − − 2 0 2 2 0 0 2 2 0 0 4 ( ) 4 ( ) 2 h a h v h s h (5-7) 式中的变化范围为 0 2 ~ 0 。这时,从动件的位移曲线为图 5-8 所示的位移曲线上一段向下凹的 抛物线,两段反向抛物线在中点处光滑相连,故匀加速匀减速运动规律又称为抛物线运动规律 (parabolic motion curve)。 由图 5-8 可知,加速度曲线上 A 、 B 、C 三点的加速度为一有限值突变,因而引起的冲击 较小或较柔和,故称为柔性冲击(soft impulse)。但在高速情况下仍将导致严重的振动、噪声和 磨损,所以这种运动规律只适用于中、低速轻载的工况。 同理,根据回程中的边界条件,可得回程时等加速等减速运动规律的运动方程为 回程匀加速段: = − = − = − 2 0 4 4 2 ' 0 2' 0 2 2' 0 2' 0 2 h a h v h s h (5-8) 回程匀减速段: = − − = = − ' 0 ' 0 2' 0 2 ' 2 0 ' 0 ' 2 2 0 ' 0 2 4 ( ) 4 ( ) 2 h a h v h s (5-9) 3)五次多项式运动规律( n = 5 ) 五次多项式的表达式为

s=C。+C6+C282+C63+C484+C,8 v=C0+2C200+3C3062+4C4063+5C,064 (5-10) a=+2C202+6C,026+12C40262+20C,028 因该方程组中待定系数有6个,故可设定6个边界条件为 在始点处:6=0,s=0,v=0,a=0。 在终点处:6=。,s=h,v=0,a=0。 代入式(5-10)可得C=0,C=0,C2=0,C=10h/,C4=15h/6,C=6h/。 由此可推出五次多项式运动规律的运动方程为 5=10h6_15h6+606 O0 s30 (5-11) a 60ho8-180ho282+120o2 式(5-11)的位移方程中分别含有3、4、5次幂,故这种运动规律又称为3-45次多项式。 图5-9所示为其运动线图,其中s为位移曲线,v为速度曲线,α为加速度曲线。由图可知,加 速度曲线光滑连续,故此运动规律既无刚性冲击也无柔性冲击,适于高速、中载的场合。 图5-9五次多项式运动线图 2.三角函数运动规律 三角函数运动规律包括简谐运动规律和摆线运动规律这两种基本的运动规律。 1)余弦加速度运动规律(cosine acceleration motion curve) 余弦加速度运动规律又称为简谐运动规律(simple harmonic motion curve),如图5-l0所示, 当质点沿着以推程为直径的圆周匀速运动时,它在直径上的投影点的运动即为简谐运动。其推 程的运动方程为
85 = + + + + = + + + + = + + + + + 2 3 5 2 2 4 2 3 2 2 4 5 3 4 2 1 2 3 5 5 4 4 3 3 2 0 1 2 2 6 12 20 2 3 4 5 a C C C C v C C C C C s C C C C C C (5-10) 因该方程组中待定系数有 6 个,故可设定 6 个边界条件为 在始点处: = 0 , s = 0 , v = 0 , a = 0 。 在终点处: = 0 , s = h , v = 0 , a = 0 。 代入式(5-10)可得 C0 = 0 ,C1 = 0 ,C2 = 0 , 3 C3 =10h 0 , 4 C4 = =15h 0 , 5 C5 = 6h 0 。 由此可推出五次多项式运动规律的运动方程为 = − + = − + = − + 2 3 5 0 2 2 4 0 2 3 0 4 5 0 3 4 0 2 3 0 5 5 0 4 4 0 3 3 0 60 180 120 30 60 30 10 15 6 h h h a h h h v h h h s (5-11) 式(5-11)的位移方程中分别含有 3、4、5 次幂,故这种运动规律又称为 3-4-5 次多项式。 图 5-9 所示为其运动线图,其中 s 为位移曲线,v 为速度曲线,a 为加速度曲线。由图可知,加 速度曲线光滑连续,故此运动规律既无刚性冲击也无柔性冲击,适于高速、中载的场合。 图 5-9 五次多项式运动线图 2.三角函数运动规律 三角函数运动规律包括简谐运动规律和摆线运动规律这两种基本的运动规律。 1)余弦加速度运动规律(cosine acceleration motion curve) 余弦加速度运动规律又称为简谐运动规律(simple harmonic motion curve),如图 5-10 所示, 当质点沿着以推程 h 为直径的圆周匀速运动时,它在直径上的投影点的运动即为简谐运动。其推 程的运动方程为