BUCT 机械制新设计 第五章机构组合与创新设计 第一节串联式组合 第二节并联式组合 第三节封闭式组合 第四节装载式组合 Page1
机械创新设计 Page1 B U C T B U C T 第五章 机构组合与创新设计 机构组合与创新设计 第一节 串联式组合 第二节 并联式组合 第三节 封闭式组合 第四节 装载式组合
BUCT 机械创新设计 机构组合是指基本机构以不同的方式 连接,生成复杂机构的过程。 目的是改善基本机构的运动和动力特 性,实现更高要求。 Page2
机械创新设计 Page2 B U C T B U C T 机构组合是指基本机构以不同的方式 连接,生成复杂机构的过程。 目的是改善基本机构的运动和动力特 性,实现更高要求
BUCT 机械创新葭计 基本机构 单环的连杆机构、凸轮机构、齿轮机构、间歇 运动机构、螺旋机构、挠性件传动机构、以及 这些机构的倒置机构等 组合方式 串联式、并联式、封闭式、装载式 Page3
机械创新设计 Page3 B U C T B U C T 基本机构 单环的连杆机构、凸轮机构、齿轮机构、间歇 运动机构、螺旋机构、挠性件传动机构、以及 这些机构的倒置机构等 组合方式 串联式、并联式、封闭式、装载式
BUCT 机械创新设计 1.串联式组合 两个及两个以上基本机构顺序连 接,每一个前置机构的输出为后 置机构的输入,用以满足工作要 求 输入 机构1 机构2 输出 Page4
机械创新设计 Page4 B U C T B U C T 1. 串联式组合 两个及两个以上基本机构顺序连 两个及两个以上基本机构顺序连 接,每一个前置机构的输出为后 接,每一个前置机构的输出为后 置机构的输入,用以满足工作要 置机构的输入,用以满足工作要 求 输入 机构1 机构2 输出
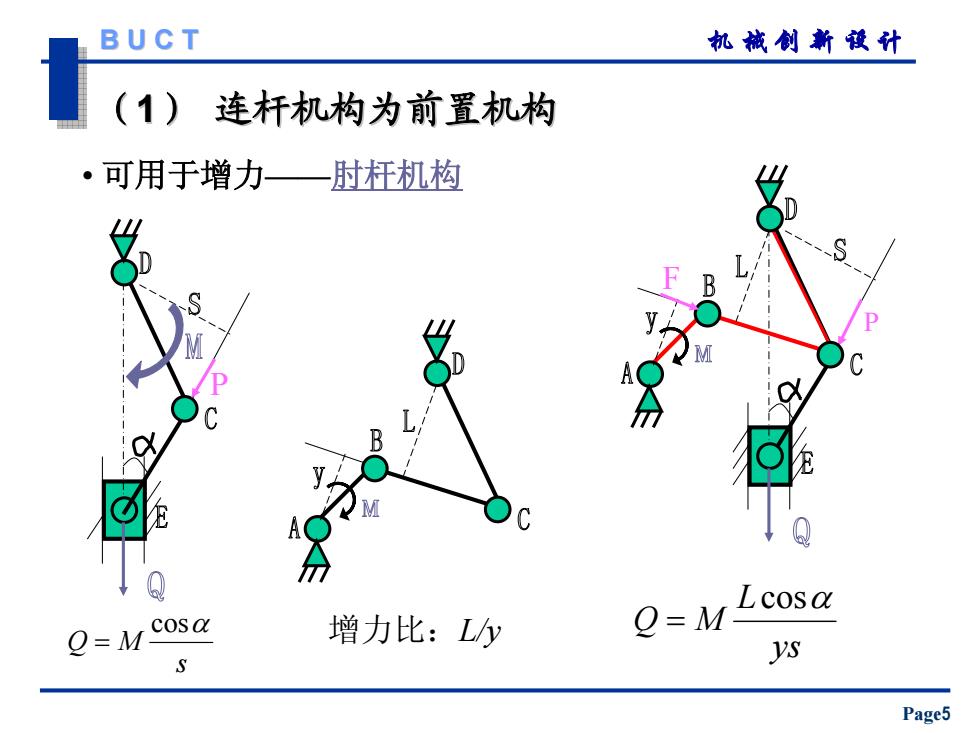
BUCT 机械创新设计 (1) 连杆机构为前置机构 ·可用于增力一肘杆机构 Lcosa O=M cosa 增力比:Ly Q=M ys Page5
机械创新设计 Page5 B U C T B U C T (1) 连杆机构为前置机构 连杆机构为前置机构 • 可用于增力——肘杆机构 P F P ys L Q M cosα = s Q M cosα = 增力比:L/y