第八章其他常用机构 内容提要 本章主要介绍棘轮机构、槽轮机构、不完全齿轮机构、凸轮式间歇运动机构、螺旋机构和万 向联轴节机构等常用机构,重点描述了这些机构的工作原理、类型、特点、应用实例及设计要点。 在许多机器中,除了采用前面介绍的平面连杆机构、凸轮机构、齿轮机构外,还经常采用其 他类型的机构,如间歇运动机构、螺旋机构、万向联轴节机构等。其中间歇运动机构的功能是当 主动件作连续运动时,从动件产生周期性的运动和停歇。常见的间歇运动机构有棘轮机构、槽轮 机构、不完全齿轮机构等。 8.1棘轮机构 8.1.1棘轮机构的工作原理、应用和特点 如图8-l所示为一棘轮机构(ratchet mechanism),主动件1是一个可以连续往复摆动的摇杆。 当摇杆1逆时针摆动时,驱动棘爪2卡在棘轮的齿槽中(图中A处),拔动棘轮逆时针转过一个 角度,此时止动棘爪4在棘轮的齿背上滑过:当摇杆1顺时针摆动时,驱动棘爪2在棘轮的齿背 上滑过,而止动棘爪则卡在棘轮的齿槽中(图中B处),阻止棘轮顺时针转动,故此时棘轮静山 不动。弹簧5的作用是保证止动棘爪4和棘轮3始终接触。由此可见,当摇杆1作连续摆动时, 棘轮3则作单向间歇运动。 2 图&1棘轮机构工作原理 178
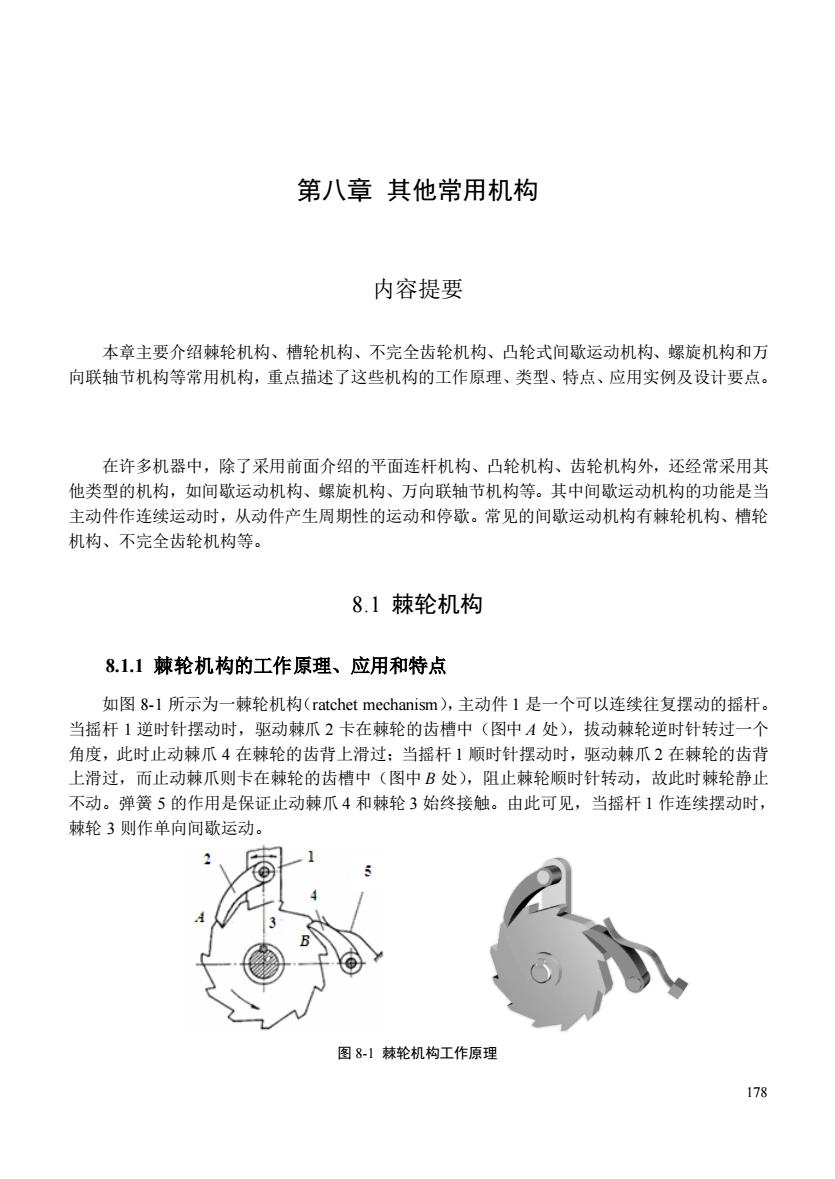
178 第八章 其他常用机构 内容提要 本章主要介绍棘轮机构、槽轮机构、不完全齿轮机构、凸轮式间歇运动机构、螺旋机构和万 向联轴节机构等常用机构,重点描述了这些机构的工作原理、类型、特点、应用实例及设计要点。 在许多机器中,除了采用前面介绍的平面连杆机构、凸轮机构、齿轮机构外,还经常采用其 他类型的机构,如间歇运动机构、螺旋机构、万向联轴节机构等。其中间歇运动机构的功能是当 主动件作连续运动时,从动件产生周期性的运动和停歇。常见的间歇运动机构有棘轮机构、槽轮 机构、不完全齿轮机构等。 8.1 棘轮机构 8.1.1 棘轮机构的工作原理、应用和特点 如图 8-1 所示为一棘轮机构(ratchet mechanism),主动件 1 是一个可以连续往复摆动的摇杆。 当摇杆 1 逆时针摆动时,驱动棘爪 2 卡在棘轮的齿槽中(图中 A 处),拔动棘轮逆时针转过一个 角度,此时止动棘爪 4 在棘轮的齿背上滑过;当摇杆 1 顺时针摆动时,驱动棘爪 2 在棘轮的齿背 上滑过,而止动棘爪则卡在棘轮的齿槽中(图中 B 处),阻止棘轮顺时针转动,故此时棘轮静止 不动。弹簧 5 的作用是保证止动棘爪 4 和棘轮 3 始终接触。由此可见,当摇杆 1 作连续摆动时, 棘轮 3 则作单向间歇运动。 图 8-1 棘轮机构工作原理
棘轮机构一般用作机床及自动机械的进给机构、送料机构、刀架的转位机构、精纺机的成型 机构、牛头侧床的进给机构等。如图8-2所示为牛头刨床的进给机构,当齿轮1转动后,经连杆 2带动摇杆3作往复摆动,摇杆3上的棘爪推动棘轮4作间歇转动,与之固连的丝杠5也作同样 的间歇转动,从而实现牛头侧床工作台的间歇进给运动。 棘轮机构也广泛应用于卷扬机、提升机及牵引设备中,用它作为防止机械逆转的止动器。如 图83所示的起重止动器,机构工作时,驱动力使轴2逆时针转动,通过键3带动棘轮1及卷筒 逆时针转动,而提起重物,此时棘爪4在棘轮的齿背上滑动。当撤掉驱动力后,卷筒与棘轮在重 物的作用下有顺时针转动的趋势,此时棘爪4卡在棘轮的齿槽中,防止机构逆转。 0 图8-2牛头创床的进给机构 图83起重止动器 棘轮机构结构简单,制造方便,运动可靠,且棘轮轴每次转过的角度的大小可以在较大的范 围内调节。但棘轮机构不能传递大的动力,而且传动平稳性较差,工作时有较大的冲击和噪声, 不适于高速传动。 8.1.2棘轮机构的类型 在基本的棘轮机构的基础上作些改变,即可得到不同的棘轮机构。按其工作原理可分为齿式 棘轮机构和摩擦式棘轮机构两大类。 1,齿式棘轮机构 齿式棘轮机构的特点是棘轮上分布着若干刚性的棘齿,由棘爪推动棘齿使棘轮作间歇运动, 其类型有以下几种分类方式。 1)按轮齿分布方式不同分类 棘轮机构可分为外棘轮机构(如图8-4妇所示)入、内棘轮机构(如图84b所示)和棘爪棘条 机构(如图84c所示)。棘爪棘条机构可将棘爪的连续摆动变为棘条的间歇移动。 2)按工作方式分类 按照工作方式棘轮机构可分为单动式棘轮机构(如图84所示)和双动式棘轮机构(如图 85所示)。 单动式棘轮机构的特点是当主动摆杆向一个方向摆动时,棘轮沿同一方向转过某一角度,而 当主动摆杆反向摆动时,棘轮静止不动,即主动摆杆往复摆动一次,只能使棘轮沿一个方向间歇 120
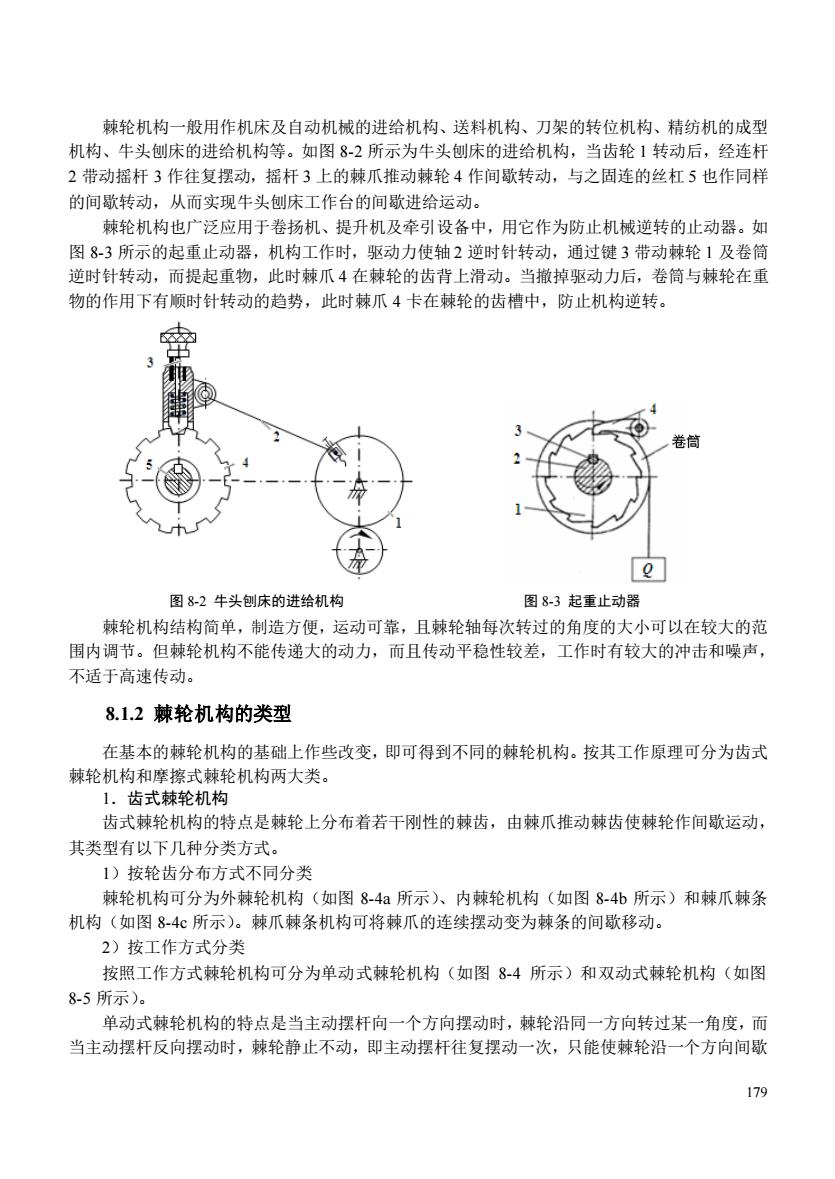
179 棘轮机构一般用作机床及自动机械的进给机构、送料机构、刀架的转位机构、精纺机的成型 机构、牛头刨床的进给机构等。如图 8-2 所示为牛头刨床的进给机构,当齿轮 1 转动后,经连杆 2 带动摇杆 3 作往复摆动,摇杆 3 上的棘爪推动棘轮 4 作间歇转动,与之固连的丝杠 5 也作同样 的间歇转动,从而实现牛头刨床工作台的间歇进给运动。 棘轮机构也广泛应用于卷扬机、提升机及牵引设备中,用它作为防止机械逆转的止动器。如 图 8-3 所示的起重止动器,机构工作时,驱动力使轴 2 逆时针转动,通过键 3 带动棘轮 1 及卷筒 逆时针转动,而提起重物,此时棘爪 4 在棘轮的齿背上滑动。当撤掉驱动力后,卷筒与棘轮在重 物的作用下有顺时针转动的趋势,此时棘爪 4 卡在棘轮的齿槽中,防止机构逆转。 图 8-2 牛头刨床的进给机构 图 8-3 起重止动器 棘轮机构结构简单,制造方便,运动可靠,且棘轮轴每次转过的角度的大小可以在较大的范 围内调节。但棘轮机构不能传递大的动力,而且传动平稳性较差,工作时有较大的冲击和噪声, 不适于高速传动。 8.1.2 棘轮机构的类型 在基本的棘轮机构的基础上作些改变,即可得到不同的棘轮机构。按其工作原理可分为齿式 棘轮机构和摩擦式棘轮机构两大类。 1.齿式棘轮机构 齿式棘轮机构的特点是棘轮上分布着若干刚性的棘齿,由棘爪推动棘齿使棘轮作间歇运动, 其类型有以下几种分类方式。 1)按轮齿分布方式不同分类 棘轮机构可分为外棘轮机构(如图 8-4a 所示)、内棘轮机构(如图 8-4b 所示)和棘爪棘条 机构(如图 8-4c 所示)。棘爪棘条机构可将棘爪的连续摆动变为棘条的间歇移动。 2)按工作方式分类 按照工作方式棘轮机构可分为单动式棘轮机构(如图 8-4 所示)和双动式棘轮机构(如图 8-5 所示)。 单动式棘轮机构的特点是当主动摆杆向一个方向摆动时,棘轮沿同一方向转过某一角度,而 当主动摆杆反向摆动时,棘轮静止不动,即主动摆杆往复摆动一次,只能使棘轮沿一个方向间歇
转动一次。 (a) (b) (c) 图84单动式棘轮机构 双动式棘轮机构的棘爪即可以制成钩头的,又可以制成平头的。图85所示为钩头棘爪棘 轮机构。工作时,摆杆1往复摆动,棘爪2和3交替钩动棘轮4的棘齿,带动棘轮4顺时针间歇 转动两次。当1个棘爪驱动棘轮转动时(如图的棘爪2),另一个棘爪在棘轮的齿背上滑过(如 图中的棘爪3)。图85b所示为平头棘爪棘轮机构,与钩头棘爪棘轮机构不同的是摆杆1往复摆 动时靠棘爪2和3推动棘轮4逆时针间歇转动两次, (b) 图85双动式棘轮机构 3)按棘轮转向是否可调分类 按照棘轮转向是否可调棘轮机构可分为单向运动棘轮机构(如图8-4、8-5所示)和可变向 运动棘轮机构(如图8-6所示)。 单向运动棘轮机构只能实现棘轮沿一个方向的单向转动,而可变向运动棘轮机构可通过改变 驱动棘爪的位置,实现棘轮分别沿两个方向单向转动,其棘轮必须采用对称齿形,常用的有梯形 齿和矩形齿。图85所示的可变向运动棘轮机构中,棘爪具有对称的爪端,可绕其转动中心A 翻转至虚线位置,从而实现棘轮不同转向的间歇运动。图85b所示为另一种可变向运动棘轮机 构,其棘爪具有单侧的工作面。在图示位置时,棘爪推动棘轮齿槽的左侧,使棘轮作逆时针方向 的间歇转动:若将棘爪提起绕其自身轴线转180°后放下,棘爪则推动棘轮齿槽的右侧,使棘轮 作顺时针方向的间歇转动:若将棘爪提起绕本身轴线转动90°,棘爪将被架在壳体的平面上,使 棘轮与棘爪脱开,当棘爪往复摆动时,棘轮静止不动。 180
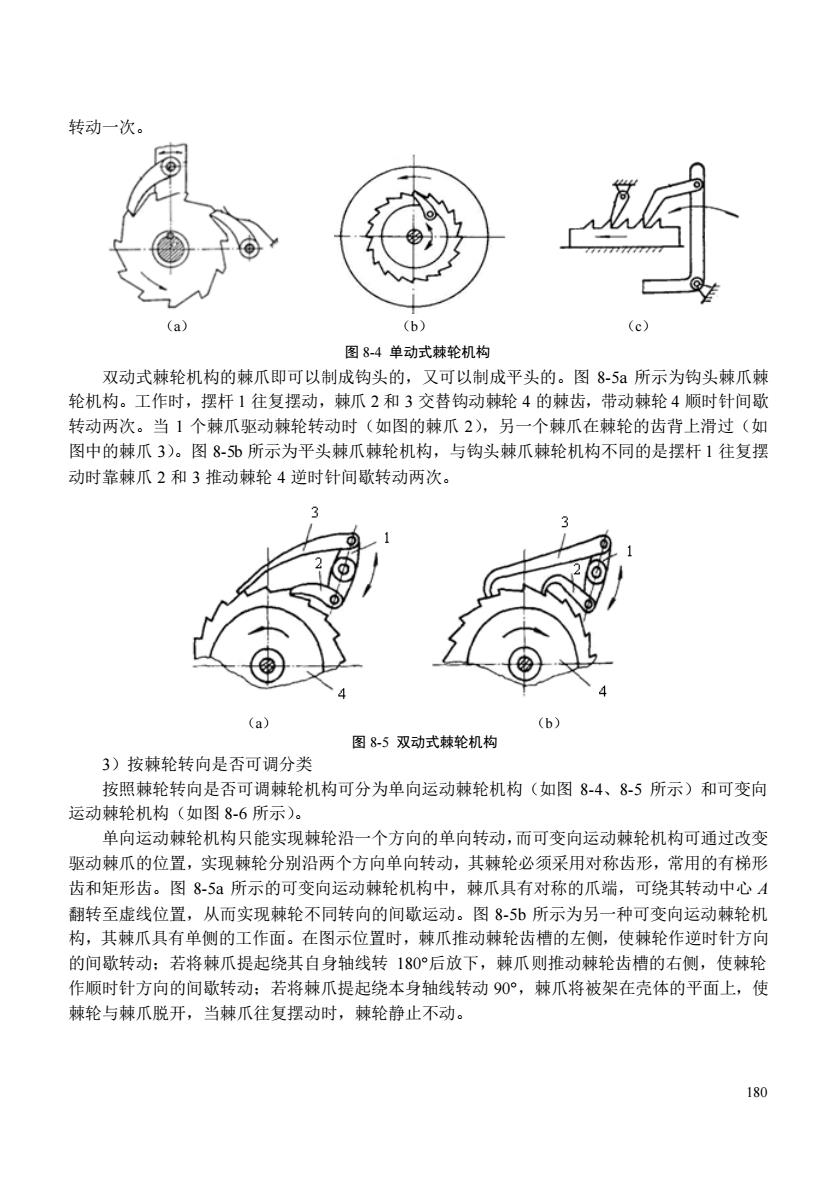
180 转动一次。 (a) (b) (c) 图 8-4 单动式棘轮机构 双动式棘轮机构的棘爪即可以制成钩头的,又可以制成平头的。图 8-5a 所示为钩头棘爪棘 轮机构。工作时,摆杆 1 往复摆动,棘爪 2 和 3 交替钩动棘轮 4 的棘齿,带动棘轮 4 顺时针间歇 转动两次。当 1 个棘爪驱动棘轮转动时(如图的棘爪 2),另一个棘爪在棘轮的齿背上滑过(如 图中的棘爪 3)。图 8-5b 所示为平头棘爪棘轮机构,与钩头棘爪棘轮机构不同的是摆杆 1 往复摆 动时靠棘爪 2 和 3 推动棘轮 4 逆时针间歇转动两次。 (a) (b) 图 8-5 双动式棘轮机构 3)按棘轮转向是否可调分类 按照棘轮转向是否可调棘轮机构可分为单向运动棘轮机构(如图 8-4、8-5 所示)和可变向 运动棘轮机构(如图 8-6 所示)。 单向运动棘轮机构只能实现棘轮沿一个方向的单向转动,而可变向运动棘轮机构可通过改变 驱动棘爪的位置,实现棘轮分别沿两个方向单向转动,其棘轮必须采用对称齿形,常用的有梯形 齿和矩形齿。图 8-5a 所示的可变向运动棘轮机构中,棘爪具有对称的爪端,可绕其转动中心 A 翻转至虚线位置,从而实现棘轮不同转向的间歇运动。图 8-5b 所示为另一种可变向运动棘轮机 构,其棘爪具有单侧的工作面。在图示位置时,棘爪推动棘轮齿槽的左侧,使棘轮作逆时针方向 的间歇转动;若将棘爪提起绕其自身轴线转 180°后放下,棘爪则推动棘轮齿槽的右侧,使棘轮 作顺时针方向的间歇转动;若将棘爪提起绕本身轴线转动 90°,棘爪将被架在壳体的平面上,使 棘轮与棘爪脱开,当棘爪往复摆动时,棘轮静止不动
(a) (b) 图8-6可变向运动棘轮机构 2.摩擦式棘轮机构 齿式棘轮机构中棘轮转角可在较大范围内调节,但是只能进行有级调整,其大小为一个棘齿 所对中心角的整数倍。如果需要无级调整棘轮的转角,则可采用摩擦式棘轮机构(如图87所示), 其传动过程与齿式棘轮机构相似,用楔块代替齿式棘轮机构的棘爪,用没有棘齿的摩擦轮代替棘 轮。 (a)楔块外接摩擦式 (b)楔块内接摩擦式 (c)滚子内接摩擦式 图87摩擦式棘轮机构 8.13棘轮机构的设计要点 棘轮机构的设计主要应考虑:棘轮齿形的选择、模数齿数的确定、齿面倾斜角的确定、行程 和动停比的调节方法。现以齿式棘轮机构为例,说明其设计方法。 1,棘轮齿形的选择 如图8-8所示为棘轮常用齿形。图8-8a所示的不对称梯形棘轮齿形主要用于承受载荷较大 的单向式棘轮:当棘轮机构承受的载荷较小时,可采用图&8b所示的不对称三角形齿形或图8-8© 所示的圆弧形齿形:图8-8d所示的对称梯形齿形和图8-8所示的对称矩形齿形用于双向式棘轮 机构。 2.棘轮模数m、齿数:的确定 与齿轮相同,棘轮轮齿的有关尺寸也用模数m作为计算的基本参数,但棘轮的标准模数要 按棘轮的顶圆直径d。来计算,即 d。=me (8-1)
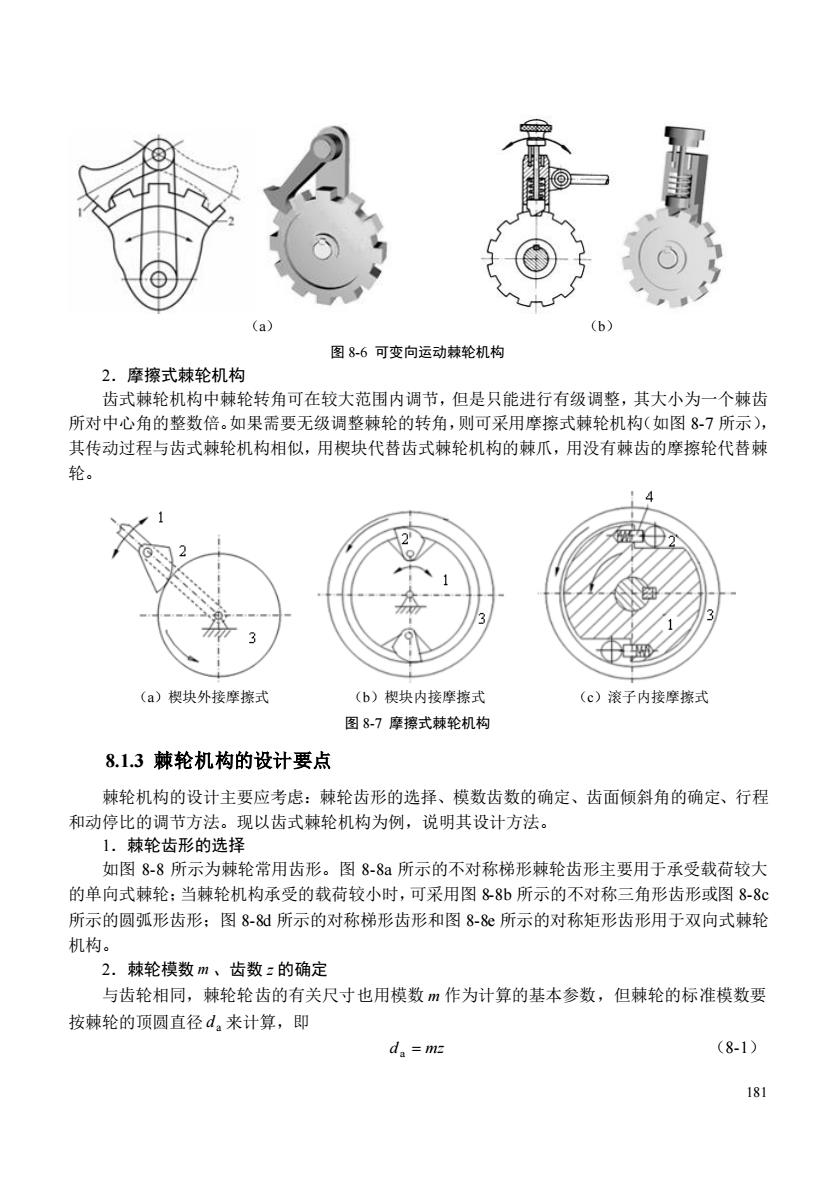
181 (a) (b) 图 8-6 可变向运动棘轮机构 2.摩擦式棘轮机构 齿式棘轮机构中棘轮转角可在较大范围内调节,但是只能进行有级调整,其大小为一个棘齿 所对中心角的整数倍。如果需要无级调整棘轮的转角,则可采用摩擦式棘轮机构(如图 8-7 所示), 其传动过程与齿式棘轮机构相似,用楔块代替齿式棘轮机构的棘爪,用没有棘齿的摩擦轮代替棘 轮。 (a)楔块外接摩擦式 (b)楔块内接摩擦式 (c)滚子内接摩擦式 图 8-7 摩擦式棘轮机构 8.1.3 棘轮机构的设计要点 棘轮机构的设计主要应考虑:棘轮齿形的选择、模数齿数的确定、齿面倾斜角的确定、行程 和动停比的调节方法。现以齿式棘轮机构为例,说明其设计方法。 1.棘轮齿形的选择 如图 8-8 所示为棘轮常用齿形。图 8-8a 所示的不对称梯形棘轮齿形主要用于承受载荷较大 的单向式棘轮;当棘轮机构承受的载荷较小时,可采用图 8-8b 所示的不对称三角形齿形或图 8-8c 所示的圆弧形齿形;图 8-8d 所示的对称梯形齿形和图 8-8e 所示的对称矩形齿形用于双向式棘轮 机构。 2.棘轮模数 m 、齿数 z 的确定 与齿轮相同,棘轮轮齿的有关尺寸也用模数 m 作为计算的基本参数,但棘轮的标准模数要 按棘轮的顶圆直径 a d 来计算,即 d = mz a (8-1) A
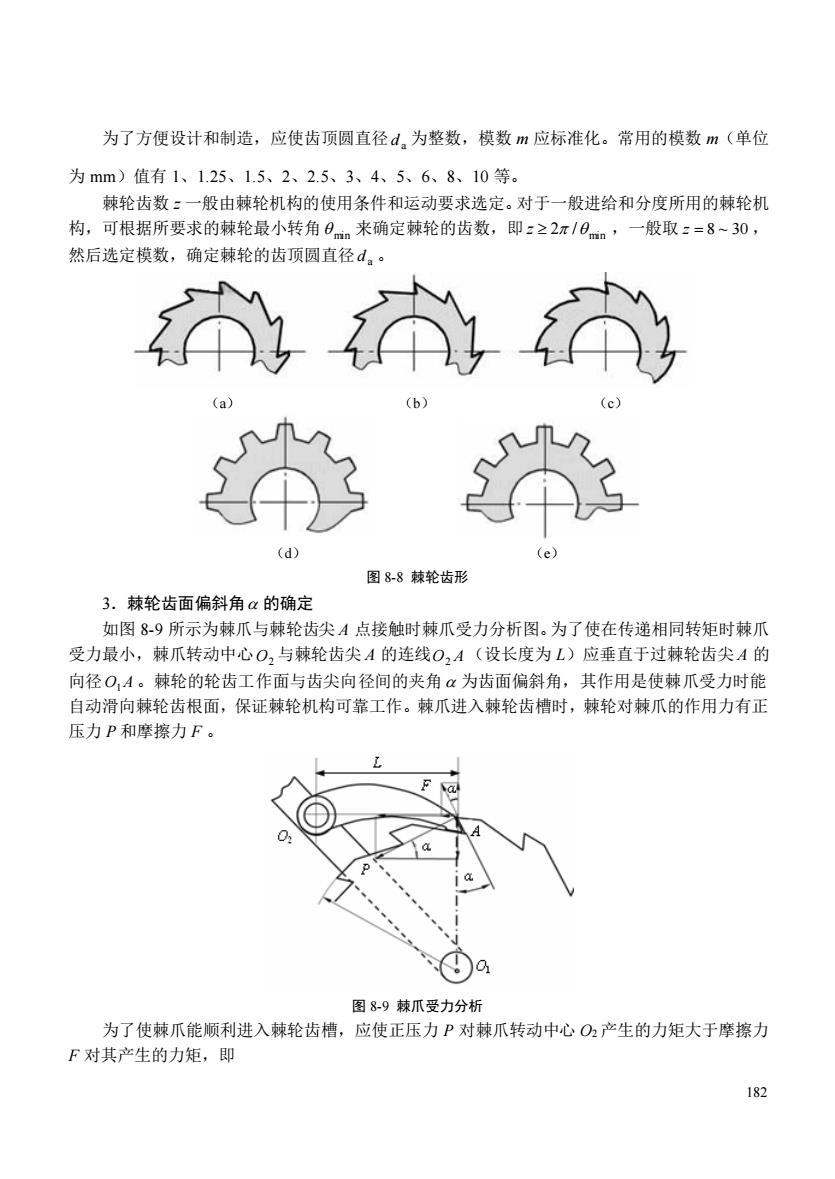
为了方便设计和制造,应使齿顶圆直径d,为整数,模数m应标准化。常用的模数m(单位 为mm)值有1、1.25、1.5、2、2.5、3、4、5、6、8、10等。 棘轮齿数:一般由棘轮机构的使用条件和运动要求选定。对于一般进给和分度所用的棘轮机 构,可根据所要求的棘轮最小转角日来确定棘轮的齿数,即:≥2π/日。,一般取:=8、30, 然后选定模数,确定棘轮的齿顶圆直径d, d 图88棘轮齿形 3.棘轮齿面偏斜角α的确定 如图89所示为棘爪与棘轮齿尖A点接触时棘爪受力分析图。为了使在传递相同转矩时棘爪 受力最小,棘爪转动中心O,与棘轮齿尖A的连线02A(设长度为L)应垂直于过棘轮齿尖A的 向径O,A。棘轮的轮齿工作面与齿尖向径间的夹角《为齿面偏斜角,其作用是使棘爪受力时能 自动滑向棘轮齿根面,保证棘轮机构可靠工作。棘爪进入棘轮齿槽时,棘轮对棘爪的作用力有正 压力P和摩擦力F。 图89棘爪受力分析 为了使棘爪能顺利进入棘轮齿槽,应使正压力P对棘爪转动中心O2产生的力矩大于摩擦力 F对其产生的力矩,即 182
182 为了方便设计和制造,应使齿顶圆直径 a d 为整数,模数 m 应标准化。常用的模数 m(单位 为 mm)值有 1、1.25、1.5、2、2.5、3、4、5、6、8、10 等。 棘轮齿数 z 一般由棘轮机构的使用条件和运动要求选定。对于一般进给和分度所用的棘轮机 构,可根据所要求的棘轮最小转角 min 来确定棘轮的齿数,即 min z 2 / ,一般取 z = 8 ~ 30 , 然后选定模数,确定棘轮的齿顶圆直径 a d 。 (a) (b) (c) (d) (e) 图 8-8 棘轮齿形 3.棘轮齿面偏斜角 的确定 如图 8-9 所示为棘爪与棘轮齿尖 A 点接触时棘爪受力分析图。为了使在传递相同转矩时棘爪 受力最小,棘爪转动中心 O2 与棘轮齿尖 A 的连线 O2 A (设长度为 L)应垂直于过棘轮齿尖 A 的 向径 O1A 。棘轮的轮齿工作面与齿尖向径间的夹角 为齿面偏斜角,其作用是使棘爪受力时能 自动滑向棘轮齿根面,保证棘轮机构可靠工作。棘爪进入棘轮齿槽时,棘轮对棘爪的作用力有正 压力 P 和摩擦力 F 。 图 8-9 棘爪受力分析 为了使棘爪能顺利进入棘轮齿槽,应使正压力 P 对棘爪转动中心 O2 产生的力矩大于摩擦力 F 对其产生的力矩,即