第二章机构的结构分析 内容提要 本章主要介绍机构的组成、机构运动简图的绘制方法、平面机构自由度的计算方法以及机构 的组成原理和结构分析。最后对空间机构进行了简单介绍。 2.1机构的组成 2.1.1构件 组成机构的每一个具有独立运动的单元体称为构件(Iik)。机器中的构件可以是单一的零 件,也可以是由若干个零件装配而成的刚性体。例如图2-l所示的连杆是内燃机中的一个构件 它由连杆体1、连杆盖2、轴瓦3、4和5、螺栓6、螺母7、开口销8等零件装配而成,如图21b 所示。由此可见,构件和零件是两个不同的概念:零件是最小的制造单元:而构件是最小的运动 单元,是组成机构的基本要素之一。 a (b 图2-1构件与零件
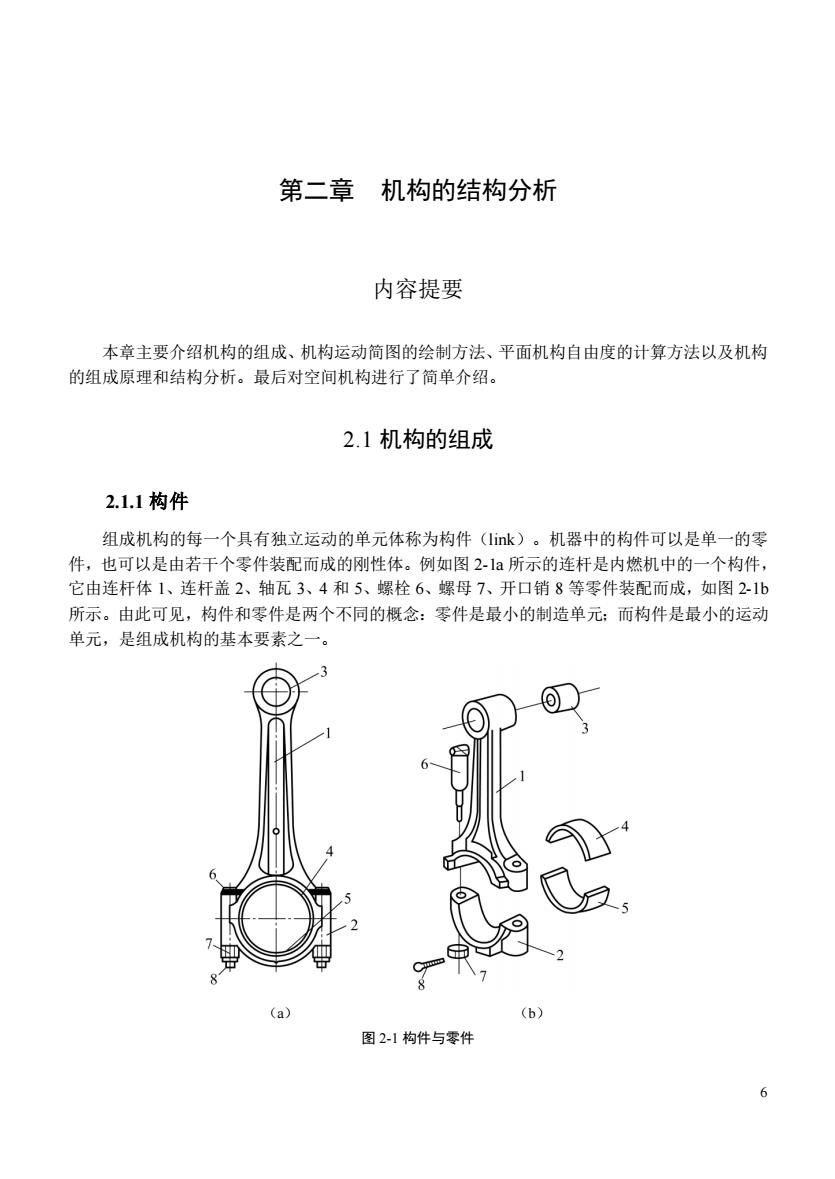
6 第二章 机构的结构分析 内容提要 本章主要介绍机构的组成、机构运动简图的绘制方法、平面机构自由度的计算方法以及机构 的组成原理和结构分析。最后对空间机构进行了简单介绍。 2.1 机构的组成 2.1.1 构件 组成机构的每一个具有独立运动的单元体称为构件(link)。机器中的构件可以是单一的零 件,也可以是由若干个零件装配而成的刚性体。例如图 2-1a 所示的连杆是内燃机中的一个构件, 它由连杆体 1、连杆盖 2、轴瓦 3、4 和 5、螺栓 6、螺母 7、开口销 8 等零件装配而成,如图 2-1b 所示。由此可见,构件和零件是两个不同的概念:零件是最小的制造单元;而构件是最小的运动 单元,是组成机构的基本要素之一。 (a) (b) 图 2-1 构件与零件
2.1.2运动副 机构都是由多个具有相对运动的构件组成的,其中每个构件都以一定的方式与其他构件相互 连接,这种连接的特点是两个构件既直接接触,又能产生一定的相对运动。这种两构件直接接触 而组成的可动连接称为运动副(kinematic pair),它也是组成机构的基本要素之一。如图2-2a 所示的轴与轴承的连接,图2-2b所示的滑块与导轨之间的连接,图2-2c所示的两齿轮轮齿的呐 合,图22d所示的凸轮与推杆的车接第均为运动副。两个构件组成云动剧时,构件上参与接创 的点、线、面称为运动副元素(pairing element),如图2-2所示的运动副元素分别是:圆柱面 平面、齿廓曲线和点。 (a) (h) (d) 图2-2运动副 运动副有许多不同的分类方法,常见的有以下几种: 1.按组成运动副两构件的相对运动的空间形式分类 若构成运动副的两构件之间的相对运动为平面运动则称为平面运动副(planar kinematic pair),如图2-2所示的各运动副。若相对运动为空间运动则称为空间运动副(spatial kinematic pai㎡),如图2-3所示的各运动副。本书将主要介绍平面运动副。 (a) (b) 图23空间运动副 2.按运动副的接触形式分类 面与面接触的运动副在承受载荷方面与点、线接触的运动副相比,其接触部分的压强较低, 故面接触的运动副称为低副(lower pair),如图2-2a、b所示的运动副。而将点、线接触的运动 副称为高副(higher pair),如图2-2c、d所示的运动副。很显然,高副比低副易磨损。 3.按组成运动副两构件的相对运动形式分类
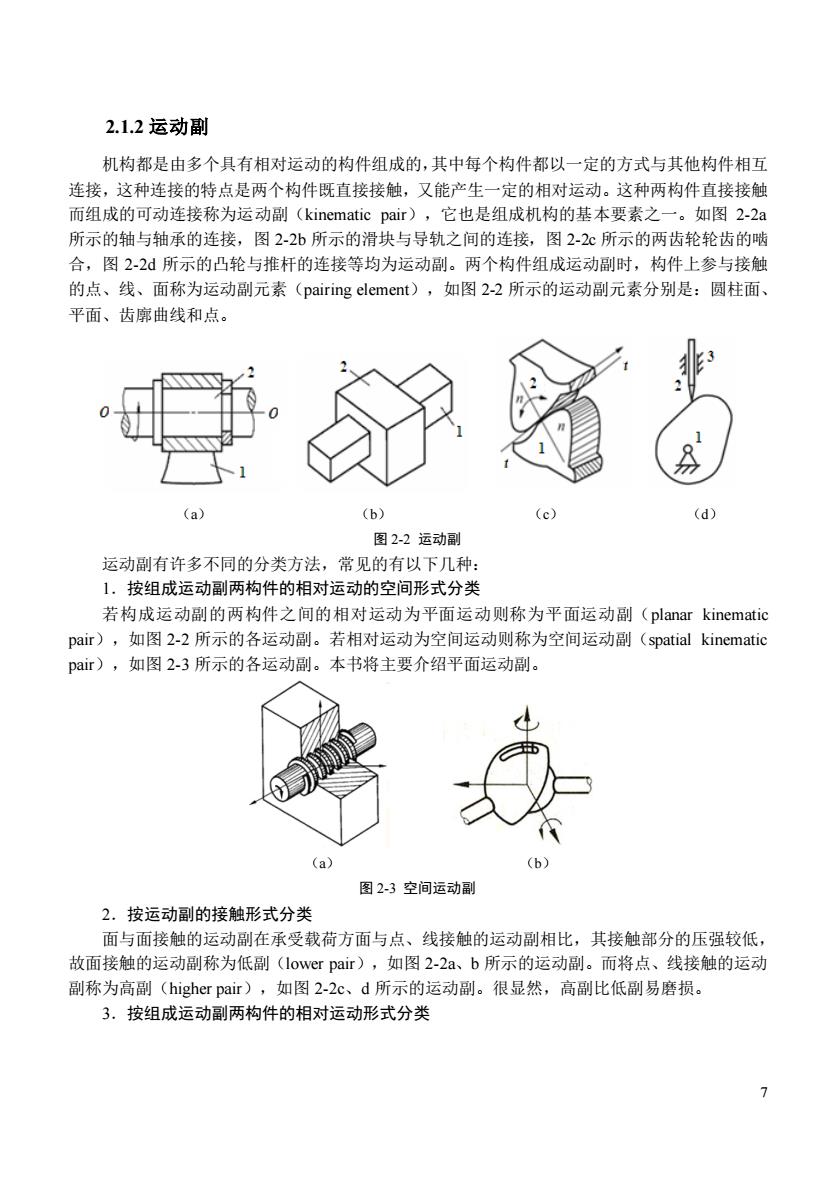
7 2.1.2 运动副 机构都是由多个具有相对运动的构件组成的,其中每个构件都以一定的方式与其他构件相互 连接,这种连接的特点是两个构件既直接接触,又能产生一定的相对运动。这种两构件直接接触 而组成的可动连接称为运动副(kinematic pair),它也是组成机构的基本要素之一。如图 2-2a 所示的轴与轴承的连接,图 2-2b 所示的滑块与导轨之间的连接,图 2-2c 所示的两齿轮轮齿的啮 合,图 2-2d 所示的凸轮与推杆的连接等均为运动副。两个构件组成运动副时,构件上参与接触 的点、线、面称为运动副元素(pairing element),如图 2-2 所示的运动副元素分别是:圆柱面、 平面、齿廓曲线和点。 (a) (b) (c) (d) 图 2-2 运动副 运动副有许多不同的分类方法,常见的有以下几种: 1.按组成运动副两构件的相对运动的空间形式分类 若构成运动副的两构件之间的相对运动为平面运动则称为平面运动副(planar kinematic pair),如图 2-2 所示的各运动副。若相对运动为空间运动则称为空间运动副(spatial kinematic pair),如图 2-3 所示的各运动副。本书将主要介绍平面运动副。 (a) (b) 图 2-3 空间运动副 2.按运动副的接触形式分类 面与面接触的运动副在承受载荷方面与点、线接触的运动副相比,其接触部分的压强较低, 故面接触的运动副称为低副(lower pair),如图 2-2a、b 所示的运动副。而将点、线接触的运动 副称为高副(higher pair),如图 2-2c、d 所示的运动副。很显然,高副比低副易磨损。 3.按组成运动副两构件的相对运动形式分类
若两构件之间只作相对转动的运动副称为转动副(revolute pair,也称回转副或铰链),如 图2-2a所示。两构件之间只作相对移动的运动副称为移动副(sliding pair),如图2-2b所示。 此外还有作相对螺旋运动的螺旋副(helical pair,如图2-3a所示)和作相对球面运动的球销副 (spherical pair,如图2-3b所示)等。 4.按运动副引入的约束数分类 构件所具有的独立运动的数目称为构件的自由度(degree of freedom) 一个独立构件在空 间上可具有6个自由度,做平面运动的自由构件具有3个自由度。两个构件直接接触构成运动副 后,构件的某些独立运动受到限制,自由度随之减少,构件之间只能产生某些相对运动。这种运 动副对构件的独立运动所产生的限制称为约束(constraint of kinematic pairing)。 运动副每引入一个约束,构件便失去一个自由度。两个构件间形成的运动副引入了多少个约 束,限制了构件的哪些独立运动,则完全取决于运动副的类型。在平面机构中,一个低副引入2 个约束,一个高副引入1个约束 通常,把引入1个约束的运动副称为I级副,引入2个约束的运动副称为Ⅱ级副,依此类推, 还有Ⅲ级副、V级副、V级副。 表2-】所示为常用运动副及其分类情况。 2.1.3运动链 两个或两个以上的构件用运动副连接构成的构件系统称为运动链(kinematic chain)。各构 件用运动副首尾连接构成封闭环路的运动链称为闭式运动链,简称闭链(closed kinematic chain), 如图24妇所示。各构件用运动副首尾连接构成不封闭环路的运动链称为开式运动链,简称开链 (open kinematic chain),如图2-4b所示。根据运动链中各构件间的相对运动为平面运动还是空 间运动,也可以把运动链分为平面运动链(planar kinematic chain)和空间运动链(spatial kinematic chain)两类,分别如图2-4、图2-5所示。 一般机械中多数采用平面闭链,开链多用于工业机器 人等机械中。随着生产线中机械手和机器人的应用日益普遍,机械中开式运动链也在逐步增多 图2-4平面运动链 图2.5空间运动错 2.1.4机构 在运动链中,如果将某一个构件加以固定,并使其余各构件都有确定的相对运动,这种运动 链称为机构。如将图2-4a所示的运动链中构件4固定,得到图2-6所示的四杆机构。 通常,将机构中固定不动的构件称为机架(fixed link),如图2-6所示的构件4。将给定独 立运动规律的构件称为原动件(driving link,或称为主动件),一般用箭头表示其运动方向,如
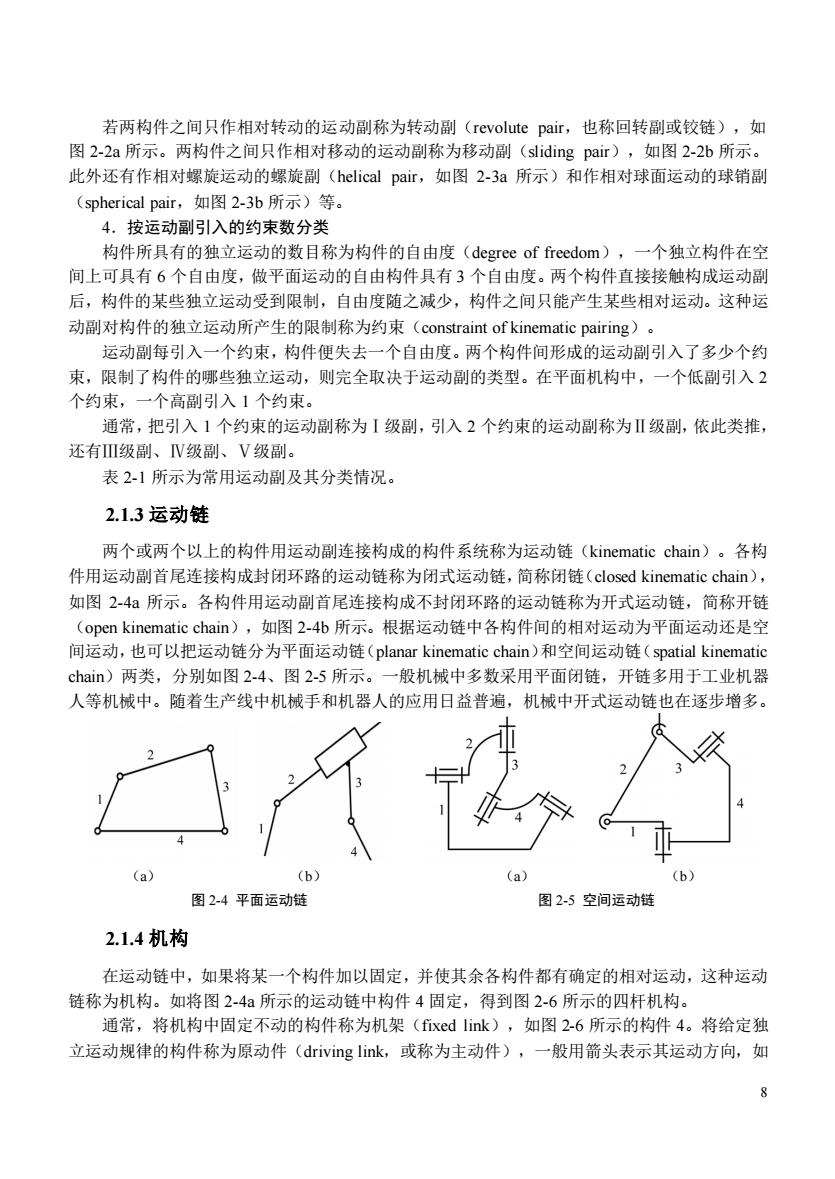
8 若两构件之间只作相对转动的运动副称为转动副(revolute pair,也称回转副或铰链),如 图 2-2a 所示。两构件之间只作相对移动的运动副称为移动副(sliding pair),如图 2-2b 所示。 此外还有作相对螺旋运动的螺旋副(helical pair,如图 2-3a 所示)和作相对球面运动的球销副 (spherical pair,如图 2-3b 所示)等。 4.按运动副引入的约束数分类 构件所具有的独立运动的数目称为构件的自由度(degree of freedom),一个独立构件在空 间上可具有 6 个自由度,做平面运动的自由构件具有 3 个自由度。两个构件直接接触构成运动副 后,构件的某些独立运动受到限制,自由度随之减少,构件之间只能产生某些相对运动。这种运 动副对构件的独立运动所产生的限制称为约束(constraint of kinematic pairing)。 运动副每引入一个约束,构件便失去一个自由度。两个构件间形成的运动副引入了多少个约 束,限制了构件的哪些独立运动,则完全取决于运动副的类型。在平面机构中,一个低副引入 2 个约束,一个高副引入 1 个约束。 通常,把引入 1 个约束的运动副称为Ⅰ级副,引入 2 个约束的运动副称为Ⅱ级副,依此类推, 还有Ⅲ级副、Ⅳ级副、Ⅴ级副。 表 2-1 所示为常用运动副及其分类情况。 2.1.3 运动链 两个或两个以上的构件用运动副连接构成的构件系统称为运动链(kinematic chain)。各构 件用运动副首尾连接构成封闭环路的运动链称为闭式运动链,简称闭链(closed kinematic chain), 如图 2-4a 所示。各构件用运动副首尾连接构成不封闭环路的运动链称为开式运动链,简称开链 (open kinematic chain),如图 2-4b 所示。根据运动链中各构件间的相对运动为平面运动还是空 间运动,也可以把运动链分为平面运动链(planar kinematic chain)和空间运动链(spatial kinematic chain)两类,分别如图 2-4、图 2-5 所示。一般机械中多数采用平面闭链,开链多用于工业机器 人等机械中。随着生产线中机械手和机器人的应用日益普遍,机械中开式运动链也在逐步增多。 (a) (b) (a) (b) 图 2-4 平面运动链 图 2-5 空间运动链 2.1.4 机构 在运动链中,如果将某一个构件加以固定,并使其余各构件都有确定的相对运动,这种运动 链称为机构。如将图 2-4a 所示的运动链中构件 4 固定,得到图 2-6 所示的四杆机构。 通常,将机构中固定不动的构件称为机架(fixed link),如图 2-6 所示的构件 4。将给定独 立运动规律的构件称为原动件(driving link,或称为主动件),一般用箭头表示其运动方向,如

图2-6所示的构件1。其余活动构件则称为从动件(driven link),如图2-6所示的构件2和构件 3。从动件的运动取决于原动件的运动规律和机构的结构。由此可见,机构是由机架、原动件和 从动件所组成的构件系统。 表2-】运动副的类型及表示符号(摘自GB4460-84) 名称 模型 简图符号 运动副级别自由度接触形式 转动副 白 移动需 平面高 圆柱套简 2 面 球销 6 面线
9 图 2-6 所示的构件 1。其余活动构件则称为从动件(driven link),如图 2-6 所示的构件 2 和构件 3。从动件的运动取决于原动件的运动规律和机构的结构。由此可见,机构是由机架、原动件和 从动件所组成的构件系统。 表 2-1 运动副的类型及表示符号(摘自 GB 4460-84) 名称 模型 简图符号 运动副级别 自由度 接触形式 转动副 Ⅴ 1 面 移动副 Ⅴ 1 面 螺旋副 Ⅴ 1 面 平面高副 Ⅳ 2 线 圆柱套筒副 Ⅳ 2 面 球销副 Ⅳ 2 面-线
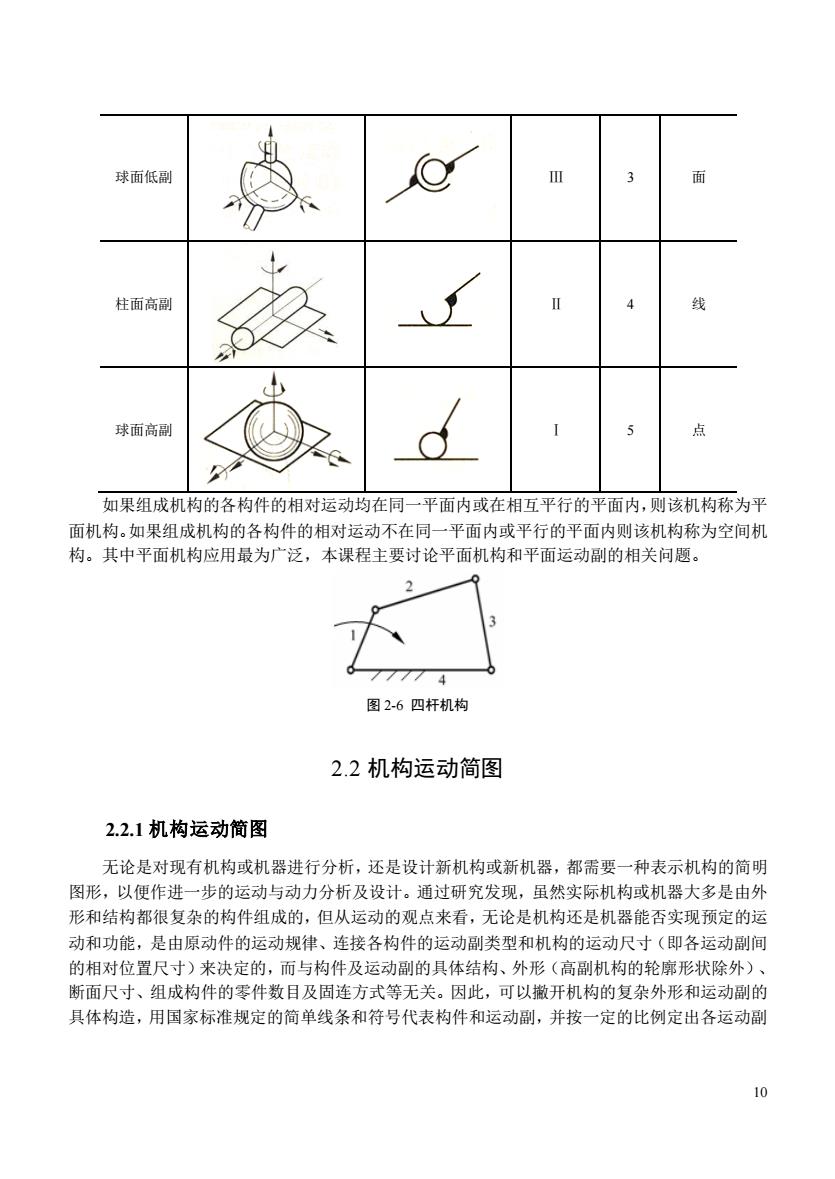
球面低副 3 柱面高 线 球面高副 如果组成机构的各构件的相对运动均在同一平面内或在相互平行的平面内,则该机构称为平 面机构。如果组成机构的各构件的相对运动不在同一平面内或平行的平面内则该机构称为空间机 构。其中平面机构应用最为广泛,本课程主要讨论平面机构和平面运动副的相关问题。 7774 图2-6四杆机构 2.2机构运动简图 2.2.1机构运动简图 无论是对现有机构或机器进行分析,还是设计新机构或新机器,都需要一种表示机构的简明 图形,以便作进一步的运动与动力分析及设计。通过研究发现,虽然实际机构或机器大多是由外 形和结构都很复杂的构件组成的,但从运动的观点来看,无论是机构还是机器能否实现预定的运 动和功能,是由原动件的运动规律、连接各构件的运动副类型和机构的运动尺寸(即各运动副间 的相对位置尺寸)来决定的,而与构件及运动副的具体结构、外形(高副机构的轮廓形状除外)、 断面尺寸、组成构件的零件数目及固连方式等无关。因此,可以撤开机构的复杂外形和运动副的 具体构造,用国家标准规定的简单线条和符号代表构件和运动副,并按一定的比例定出各运动副
10 如果组成机构的各构件的相对运动均在同一平面内或在相互平行的平面内,则该机构称为平 面机构。如果组成机构的各构件的相对运动不在同一平面内或平行的平面内则该机构称为空间机 构。其中平面机构应用最为广泛,本课程主要讨论平面机构和平面运动副的相关问题。 图 2-6 四杆机构 2.2 机构运动简图 2.2.1 机构运动简图 无论是对现有机构或机器进行分析,还是设计新机构或新机器,都需要一种表示机构的简明 图形,以便作进一步的运动与动力分析及设计。通过研究发现,虽然实际机构或机器大多是由外 形和结构都很复杂的构件组成的,但从运动的观点来看,无论是机构还是机器能否实现预定的运 动和功能,是由原动件的运动规律、连接各构件的运动副类型和机构的运动尺寸(即各运动副间 的相对位置尺寸)来决定的,而与构件及运动副的具体结构、外形(高副机构的轮廓形状除外)、 断面尺寸、组成构件的零件数目及固连方式等无关。因此,可以撇开机构的复杂外形和运动副的 具体构造,用国家标准规定的简单线条和符号代表构件和运动副,并按一定的比例定出各运动副 球面低副 Ⅲ 3 面 柱面高副 Ⅱ 4 线 球面高副 Ⅰ 5 点