第四章平面连杆机构 内容提要 本章着重讨论机械中常见的平面四杆机构。首先介绍了平面四杆机构的基本型式及其演化方 法,其次分析了平面四杆机构的运动特性和传力特性,最后介绍了平面四杆机构设计的图解法、 解析法等。 4.1概述 连杆机构(linkage mechanism)是由若干刚性构件用低副联接所组成的机构,故又称为低副 机构(lower pair mechanism)。在连杆机构中,若各运动构件均在同一平面或相互平行的平面内 运动,则称为平面连杆机构(planar linkage mechanism):若各运动构件不都在同一平面或相互平 行的平面内运动,则称为空间连杆机构(spatial linkage mechanism)。平面连杆机构的构件运动 形式多样,可实现转动、摆动、移动和平面复杂运动,也可实现已知的运动规律及轨迹,因此平 面连杆机构被广泛应用于各种机械和仪表中。如图41所示的铸造造型机砂箱翻转机构、图42 所示的车门开闭机构、图4-3所示的搅拌机构等。 平面连杆机构之所以应用如此广泛,因其具有以下显著的优点:(1)其运动副元素为面接触 压力较小,承载能力较大,且面接触便于润滑,磨损小:(2)由于两构件接触面是圆柱或平面, 加工制造方便,且易获得较高的精度:(3)两构件之间的接触是靠本身的几何封闭来维系的,不 像其它机构有时需利用弹簧或其它措施的力封闭来保持接触,对保证工作的可靠性有利。 当然平面连杆机构也存在一定的缺点:(1)一般情况下只能近似实现给定的运动规律或运动 轨迹,且设计较为复杂:(2)当给定的运动要求较多或较复杂时,需增加构件或运动副,使机构 结构复杂,积累误差增大,传动效率降低,影响其传动的精度和效率:(3)平面连杆机构中作平 面复杂运动和往复运动的构件所产生的惯性力往往难以平衡,在高速时易引起较大的振动和动载 荷,故常用于速度较低的场合。 近年来,随着连杆设计方法的发展,电子计算机的普及应用及相关设计软件的开发,连杆机 构的研究取得了长足的发展,不再局限于单自由度四杆机构的研究,也注重对多杆多自由度连杆 机构的研究,并提出了一些有关这类机构的分析及综合的方法。在设计要求上己不再局限于运动 学要求,而是同时兼顾机构的动力学特性,特别是对于高速机械,考虑构件弹性变形的运动弹性 动力学已得到很快的发展。在研究方法上,优化方法和计算机辅助设计的应用已成为研究连杆机 构的重要方法,并已相应地绵制出大量的,活用范围广、计算耗时少、使用方便的通用软件。随 着计算机的发展和现代数学工具的日益完善,以前不易解决的复杂平面连杆机构的设计问题,正 步得到解决。 分
53 第四章 平面连杆机构 内容提要 本章着重讨论机械中常见的平面四杆机构。首先介绍了平面四杆机构的基本型式及其演化方 法,其次分析了平面四杆机构的运动特性和传力特性,最后介绍了平面四杆机构设计的图解法、 解析法等。 4.1 概述 连杆机构(linkage mechanism)是由若干刚性构件用低副联接所组成的机构,故又称为低副 机构(lower pair mechanism)。在连杆机构中,若各运动构件均在同一平面或相互平行的平面内 运动,则称为平面连杆机构(planar linkage mechanism);若各运动构件不都在同一平面或相互平 行的平面内运动,则称为空间连杆机构(spatial linkage mechanism)。平面连杆机构的构件运动 形式多样,可实现转动、摆动、移动和平面复杂运动,也可实现已知的运动规律及轨迹,因此平 面连杆机构被广泛应用于各种机械和仪表中。如图 4-1 所示的铸造造型机砂箱翻转机构、图 4-2 所示的车门开闭机构、图 4-3 所示的搅拌机构等。 平面连杆机构之所以应用如此广泛,因其具有以下显著的优点:(1)其运动副元素为面接触, 压力较小,承载能力较大,且面接触便于润滑,磨损小;(2)由于两构件接触面是圆柱或平面, 加工制造方便,且易获得较高的精度;(3)两构件之间的接触是靠本身的几何封闭来维系的,不 像其它机构有时需利用弹簧或其它措施的力封闭来保持接触,对保证工作的可靠性有利。 当然平面连杆机构也存在一定的缺点:(1)一般情况下只能近似实现给定的运动规律或运动 轨迹,且设计较为复杂;(2)当给定的运动要求较多或较复杂时,需增加构件或运动副,使机构 结构复杂,积累误差增大,传动效率降低,影响其传动的精度和效率;(3)平面连杆机构中作平 面复杂运动和往复运动的构件所产生的惯性力往往难以平衡,在高速时易引起较大的振动和动载 荷,故常用于速度较低的场合。 近年来,随着连杆设计方法的发展,电子计算机的普及应用及相关设计软件的开发,连杆机 构的研究取得了长足的发展,不再局限于单自由度四杆机构的研究,也注重对多杆多自由度连杆 机构的研究,并提出了一些有关这类机构的分析及综合的方法。在设计要求上已不再局限于运动 学要求,而是同时兼顾机构的动力学特性,特别是对于高速机械,考虑构件弹性变形的运动弹性 动力学已得到很快的发展。在研究方法上,优化方法和计算机辅助设计的应用已成为研究连杆机 构的重要方法,并已相应地编制出大量的,适用范围广、计算耗时少、使用方便的通用软件。随 着计算机的发展和现代数学工具的日益完善,以前不易解决的复杂平面连杆机构的设计问题,正 逐步得到解决
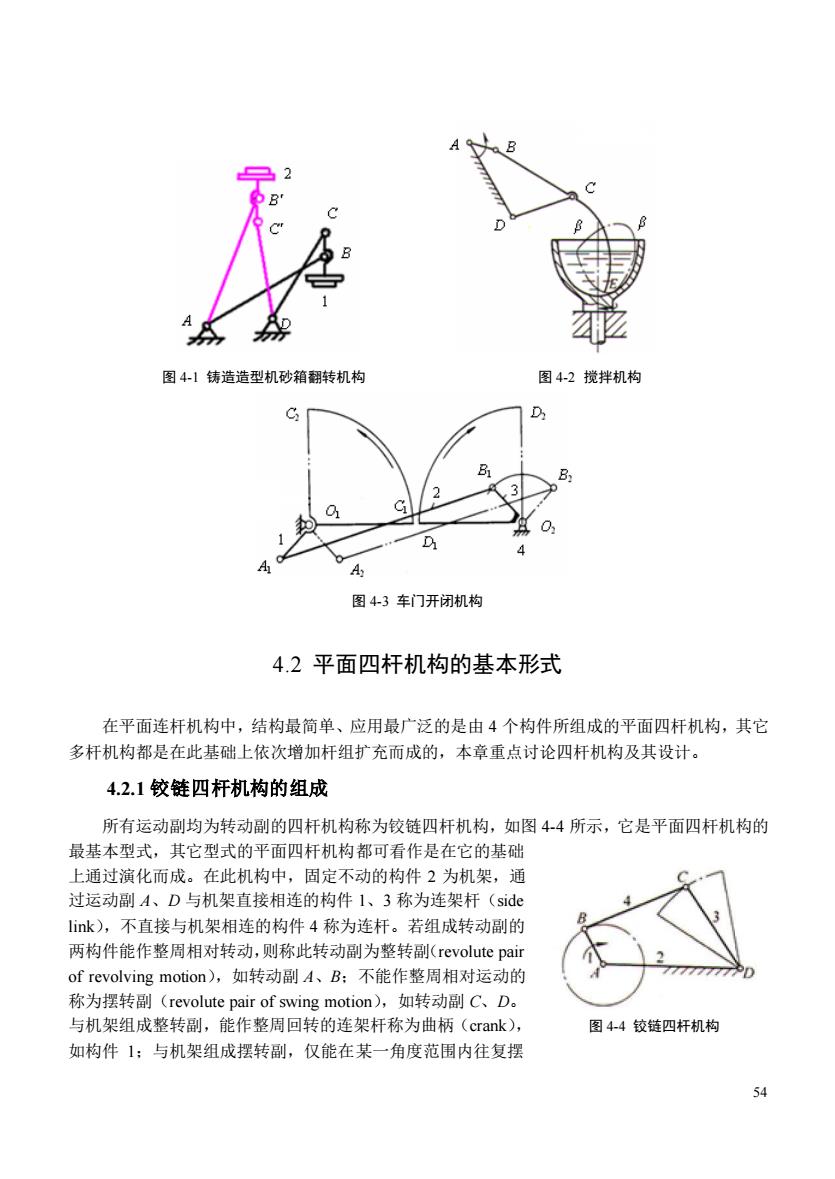
图41铸造造型机砂箱翻转机构 图42搅拌机构 D D 4 图43车门开闭机构 4.2平面四杆机构的基本形式 在平面连杆机构中,结构最简单、应用最广泛的是由4个构件所组成的平面四杆机构,其它 多杆机构都是在此基础上依次增加杆组扩充而成的,本章重点讨论四杆机构及其设计。 4.2.1铰链四杆机构的组成 所有运动副均为转动副的四杆机构称为铰链四杆机构,如图44所示,它是平面四杆机构的 最基本型式,其它型式的平面四杆机构都可看作是在它的基础 上通过演化而成。在此机构中,固定不动的构件2为机架,通 过运动副A、D与机架直接相连的构件1、3称为连架杆(side Iik),不直接与机架相连的构件4称为连杆。若组成转动副的 两构件能作整周相对转动,则称此转动副为整转副(revolute pair of revolving motion),如转动副A、B:不能作整周相对运动的 称为摆转副(revolute pair of swing motion),如转动副C、D, 与机架组成整转副,能作整周回转的连架杆称为曲柄(crak) 图44铰链四杆机构 如构件1:与机架组成摆转副,仅能在某一角度范围内往复摆
54 图 4-1 铸造造型机砂箱翻转机构 图 4-2 搅拌机构 图 4-3 车门开闭机构 4.2 平面四杆机构的基本形式 在平面连杆机构中,结构最简单、应用最广泛的是由 4 个构件所组成的平面四杆机构,其它 多杆机构都是在此基础上依次增加杆组扩充而成的,本章重点讨论四杆机构及其设计。 4.2.1 铰链四杆机构的组成 所有运动副均为转动副的四杆机构称为铰链四杆机构,如图 4-4 所示,它是平面四杆机构的 最基本型式,其它型式的平面四杆机构都可看作是在它的基础 上通过演化而成。在此机构中,固定不动的构件 2 为机架,通 过运动副 A、D 与机架直接相连的构件 1、3 称为连架杆(side link),不直接与机架相连的构件 4 称为连杆。若组成转动副的 两构件能作整周相对转动,则称此转动副为整转副(revolute pair of revolving motion),如转动副 A、B;不能作整周相对运动的 称为摆转副(revolute pair of swing motion),如转动副 C、D。 与机架组成整转副,能作整周回转的连架杆称为曲柄(crank), 如构件 1;与机架组成摆转副,仅能在某一角度范围内往复摆 图 4-4 铰链四杆机构
动的连架杆称为摇杆(rocker),如构件3。 4.2.2铰链四杆机构的基本型式 铰链四杆机构可按两连架杆运动形式它分为3种基本型式:曲柄摇杆机构、双曲柄机构和双 摇杆机构。 1.曲柄摇杆机构 在较链四杆机构中,若两连架杆中的一杆为曲柄,另一杆为摇杆,则称该四杆机构为曲柄摇 杆机构(crank-rocker mechanism),如图4-5a所示。曲柄摇杆机构中,若以曲柄为原动件,可将 曲柄的连续转动转变为摇杆的往复摆动:若以摇杆为原动件,可将摇杆的摆动转变为曲柄的整周 转动。此种机构广泛地应用于各种机械中,如图4-6所示的雷达天线俯仰搜索机构(曲柄1转动时, 可带动摇杆3摆动以调整雷达天线仰角),图4-7所示的缝纫机踏板机构(摇杆3摆动时,可带动 曲柄1整周回转)。 a (b) (c) 图45铰链四杆机构基本型式 天线 D 图4-6雷达天线俯仰搜索机构 图47缝纫机踏板机构 2.双曲柄机构 如图45b所示的铰链四杆机构中,两个连架杆相对机架作整周的回转运动,均为曲柄,此机 构称为双曲柄机构(double-crank mechanism)。在双曲柄机构中,主动曲柄连续等速转动时, 从动曲柄一般作变速转动。如图4-8所示的惯性筛机构,当主动曲柄1等速回转时,从动曲柄3变 速回转,使筛子6具有较大变化的加速度,从而利用加速度所产生的惯性力,达到筛分物料的目 的
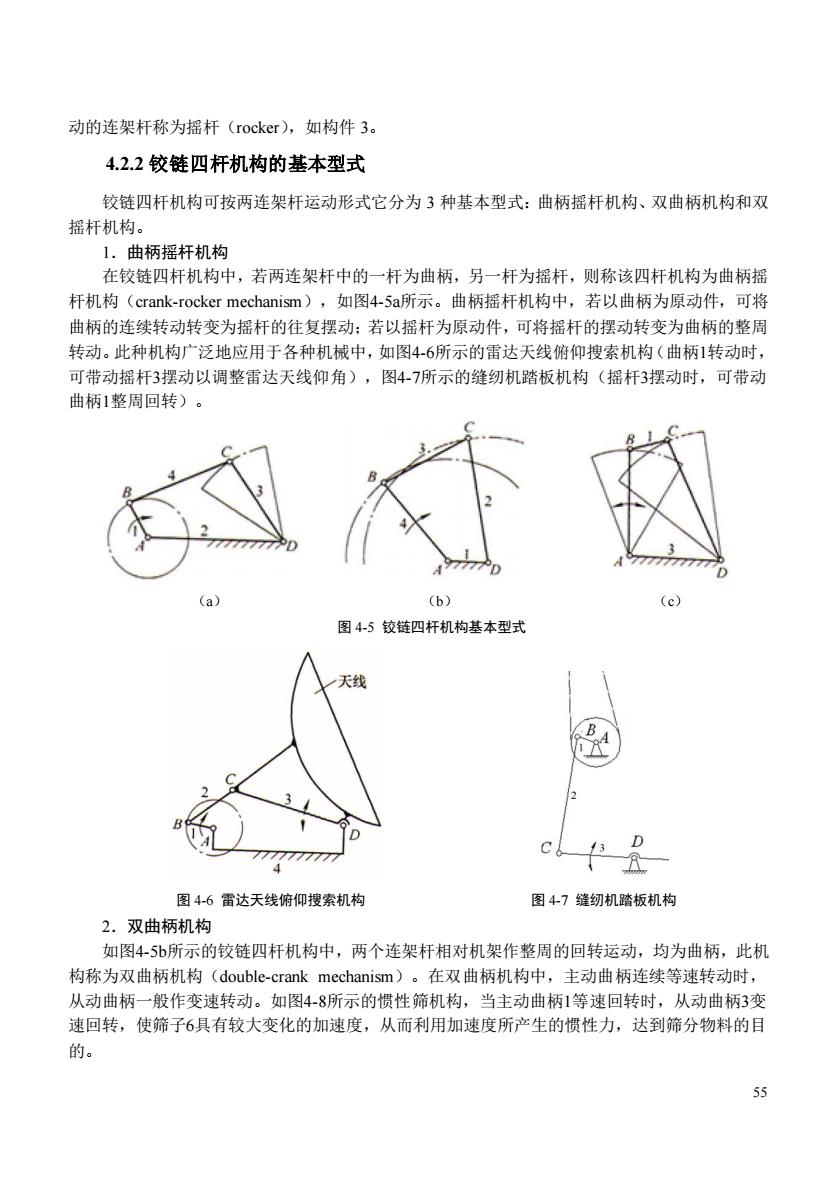
55 动的连架杆称为摇杆(rocker),如构件 3。 4.2.2 铰链四杆机构的基本型式 铰链四杆机构可按两连架杆运动形式它分为 3 种基本型式:曲柄摇杆机构、双曲柄机构和双 摇杆机构。 1.曲柄摇杆机构 在铰链四杆机构中,若两连架杆中的一杆为曲柄,另一杆为摇杆,则称该四杆机构为曲柄摇 杆机构(crank-rocker mechanism),如图4-5a所示。曲柄摇杆机构中,若以曲柄为原动件,可将 曲柄的连续转动转变为摇杆的往复摆动;若以摇杆为原动件,可将摇杆的摆动转变为曲柄的整周 转动。此种机构广泛地应用于各种机械中,如图4-6所示的雷达天线俯仰搜索机构(曲柄1转动时, 可带动摇杆3摆动以调整雷达天线仰角),图4-7所示的缝纫机踏板机构(摇杆3摆动时,可带动 曲柄1整周回转)。 (a) (b) (c) 图 4-5 铰链四杆机构基本型式 图 4-6 雷达天线俯仰搜索机构 图 4-7 缝纫机踏板机构 2.双曲柄机构 如图4-5b所示的铰链四杆机构中,两个连架杆相对机架作整周的回转运动,均为曲柄,此机 构称为双曲柄机构(double-crank mechanism)。在双曲柄机构中,主动曲柄连续等速转动时, 从动曲柄一般作变速转动。如图4-8所示的惯性筛机构,当主动曲柄1等速回转时,从动曲柄3变 速回转,使筛子6具有较大变化的加速度,从而利用加速度所产生的惯性力,达到筛分物料的目 的

。E 77777 1 图48惯性筛机构 图49平行四边形机构 在双曲柄机构中,若相对两构件长度相等且平行(如图49所示),则称为平行四边形机构 (parallel-.crank mechanism)。这种机构的特点是两曲柄均以相同的角速度转动,连杆作平行移 动。但在平行四边形机构中,有一个位置不确定的问题,如图410所示,当主动曲柄运动到B 位置时,从动曲柄可有两个位置C2和C2。为解决此问题,通常采用两种方法:一是在从动曲柄 上加装一个惯性较大的轮子,利用惯性维持从动曲柄转向不变:二是通过虚约束使机构保持平行 四边形,避免机构运动位置的不确定问题,如411所示的机车车轮联动的平行四边形机构。 B 2 3 图410平行四边形机构中的位置不确定问题 图411机车车轮联动的平行四边形机构 如图412所示的双曲柄机构,两曲柄长度相同,连杆与机架不平行,主、从动曲柄转向相 反,故称为反平行四边形机构(antiparallel-crank mechanism)。图42所示的车门开闭机构即为 其应用实例,它利用反平行四边形机构运动时,两曲柄转向相反的特性,达到两扇车门同时散开 或关闭的目的。 、2 4 3 图412反平行四边形机构 3.双摇杆机构 如图4-5c所示的铰链四杆机构,两连架杆均为摇杆,则称为双摇杆机构(double-rocker mechanism)。它可把一个摇杆的摆动转变为另一个摇杆的摆动。如图4-13所示的鹤式起重机中 的四杆机构ABCD即为双摇杆机构,当主动摇杆AB摆动时,从动摇杆CD随之摆动,位于连杆 BC延长线上的重物悬挂点E将沿近似水平直线移动。在双摇杆机构中,若两摇杆的长度相等
56 图 4-8 惯性筛机构 图 4-9 平行四边形机构 在双曲柄机构中,若相对两构件长度相等且平行(如图4-9所示),则称为平行四边形机构 (parallel-crank mechanism)。这种机构的特点是两曲柄均以相同的角速度转动,连杆作平行移 动。但在平行四边形机构中,有一个位置不确定的问题,如图4-10所示,当主动曲柄运动到B2 位置时,从动曲柄可有两个位置C2和C2 '。为解决此问题,通常采用两种方法:一是在从动曲柄 上加装一个惯性较大的轮子,利用惯性维持从动曲柄转向不变;二是通过虚约束使机构保持平行 四边形,避免机构运动位置的不确定问题,如4-11所示的机车车轮联动的平行四边形机构。 图 4-10 平行四边形机构中的位置不确定问题 图 4-11 机车车轮联动的平行四边形机构 如图 4-12 所示的双曲柄机构,两曲柄长度相同,连杆与机架不平行,主、从动曲柄转向相 反,故称为反平行四边形机构(antiparallel-crank mechanism)。图 4-2 所示的车门开闭机构即为 其应用实例,它利用反平行四边形机构运动时,两曲柄转向相反的特性,达到两扇车门同时敞开 或关闭的目的。 图 4-12 反平行四边形机构 3.双摇杆机构 如图 4-5c 所示的铰链四杆机构,两连架杆均为摇杆,则称为双摇杆机构(double-rocker mechanism)。它可把一个摇杆的摆动转变为另一个摇杆的摆动。如图 4-13 所示的鹤式起重机中 的四杆机构 ABCD 即为双摇杆机构,当主动摇杆 AB 摆动时,从动摇杆 CD 随之摆动,位于连杆 BC 延长线上的重物悬挂点 E 将沿近似水平直线移动。在双摇杆机构中,若两摇杆的长度相等
则称为等腰梯形机构。如图414所示的汽车前轮转向机构中的四杆机构ABCD即为等腰梯形机 构。 图4-13鹤式起重机示意图 图4-14汽车前轮转向机构 4.3平面四杆机构的演化 铰链四杆机构的三种基本型式远远满足不了实际工作机械的需要,在工程实际中还广泛应用 着多种不同外形、构造和特性的其它四杆机构。这些四杆机构可以看作是由铰链四杆机构的基本 形式通过不同方式演化而来的。机构的演化不但能满足运动方面的要求,而且也改善机构受力状 况以及满足结构设计上的需要等。各种演化机构的外形虽然各不相同,但他们的性质以及分析和 设计方法却常常是相同的或类似的,这就为连杆机构的研究提供了方便。下面对各种演化方法及 其应用举例加以介绍。 4.3.1将转动副转化为移动副 这种方法是通过改变构件的形状和相对尺寸,把转动副转化为移动副,从而形成滑块机构。 如图4-15a所示曲柄摇杆机构中,当曲柄1转动时,摇杆3上C点的运动轨迹是以D为圆 心,半径为CD的圆弧B-B。现将摇杆3做成滑块形状,使它在一个弧形导槽中运动,弧形导 槽的中心线与圆弧B-B重合,显然其运动性质不发生改变,但此时铰链四杆机构演变成为具有 曲线导轨的曲柄滑块机构,如图415b所示。若将圆弧B-B的中心D移至无穷远处,则C点的 运动轨迹就变为直线,弧形导槽相应地变为直线导槽,如图4-16a所示,这样一个曲柄摇杆机构 就演化成为一个曲柄滑块机构(slide--crank mechanism)。 a (b) 图415转动副转化为移动副
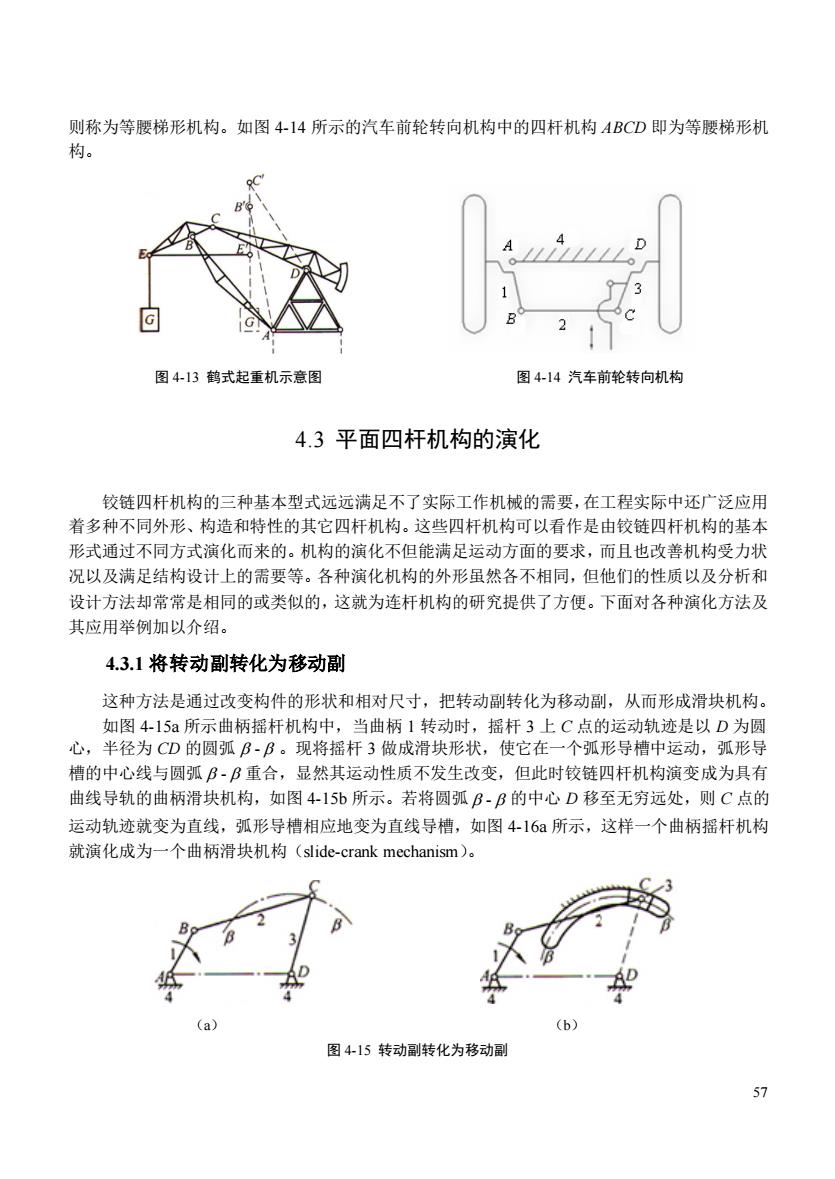
57 则称为等腰梯形机构。如图 4-14 所示的汽车前轮转向机构中的四杆机构 ABCD 即为等腰梯形机 构。 图 4-13 鹤式起重机示意图 图 4-14 汽车前轮转向机构 4.3 平面四杆机构的演化 铰链四杆机构的三种基本型式远远满足不了实际工作机械的需要,在工程实际中还广泛应用 着多种不同外形、构造和特性的其它四杆机构。这些四杆机构可以看作是由铰链四杆机构的基本 形式通过不同方式演化而来的。机构的演化不但能满足运动方面的要求,而且也改善机构受力状 况以及满足结构设计上的需要等。各种演化机构的外形虽然各不相同,但他们的性质以及分析和 设计方法却常常是相同的或类似的,这就为连杆机构的研究提供了方便。下面对各种演化方法及 其应用举例加以介绍。 4.3.1 将转动副转化为移动副 这种方法是通过改变构件的形状和相对尺寸,把转动副转化为移动副,从而形成滑块机构。 如图 4-15a 所示曲柄摇杆机构中,当曲柄 1 转动时,摇杆 3 上 C 点的运动轨迹是以 D 为圆 心,半径为 CD 的圆弧 - 。现将摇杆 3 做成滑块形状,使它在一个弧形导槽中运动,弧形导 槽的中心线与圆弧 - 重合,显然其运动性质不发生改变,但此时铰链四杆机构演变成为具有 曲线导轨的曲柄滑块机构,如图 4-15b 所示。若将圆弧 - 的中心 D 移至无穷远处,则 C 点的 运动轨迹就变为直线,弧形导槽相应地变为直线导槽,如图 4-16a 所示,这样一个曲柄摇杆机构 就演化成为一个曲柄滑块机构(slide-crank mechanism)。 (a) (b) 图 4-15 转动副转化为移动副