第七章轮系 内容提要 本章简要介绍了轮系的功用和分类,重点介绍定轴轮系、周转轮系和复合轮系的传动比计算, 并介绍了行星轮系的设计,最后简单介绍了其他常见行星轮系机构。 7.1概述 就传动而言,齿轮机构无疑是现代机械中最重要的一种传动装置,但在实际机械中,为了满 足不同的工作需要,仅用一对齿轮组成的齿轮机构往往是不够的。因此常常需要采用由一系列互 相啮合的齿轮组成的传动系统来满足不同的工作需要,这种由一系列的齿轮所组成的齿轮传动系 统称为齿轮系,简称轮系(gear train)。 7.1.1轮系的功用 轮系在机械传动中应用非常广泛,可以用以实现分路传动、换向传动、变速传动、大传动 比传动及运动的合成与分解等。 如图7-1a所示为某航空发动机附件传动系统,通过轮系将主轴的运动分成六路传出,带动 各附件同时工作。 如图71b所示为车床上走刀丝杠的三星轮换向机构,在主动轮1转向不变的条件下,通过 改变手柄的位置,使齿轮2参与啮合或不参与啮合,以改变外啮合的次数,使从动轮4与主动轮 1转向相反或相同。 如图7-1℃所示,利用双联齿轮的滑移使主动轴转速不变的情况下,从动轴可获得两种不同 的转速。 如图7-1所示,如果仅采用一对齿轮传动(如图虚线所示),必然会使两齿轮的尺寸相差 很大,这样不仅会使传动机构尺寸庞大,而且因小齿轮工作次数过多容易失效,所以一般情况下 一对齿轮传动的传动比要求i≤8。而由图中实线可知,传动同样距离、同样大小的传动比,若 采用轮系,则各齿轮尺寸明显减小,结构也更紧凑。 如图7-1©所示,当以齿轮1和齿轮3为原动机,并且齿数满足某种关系时,则构件H的转 速是齿轮1、3转速的合成。这种特性在机床、计算机装置及补偿装置中具有广泛的应用。而在 汽车后桥差速器中确利用它作为运动分解装置,它将发动机传递过来的运动,通过构件H分解 为与左右车轮固联的齿轮1、3的独立运动。 155
155 第七章 轮系 内容提要 本章简要介绍了轮系的功用和分类,重点介绍定轴轮系、周转轮系和复合轮系的传动比计算, 并介绍了行星轮系的设计,最后简单介绍了其他常见行星轮系机构。 7.1 概述 就传动而言,齿轮机构无疑是现代机械中最重要的一种传动装置,但在实际机械中,为了满 足不同的工作需要,仅用一对齿轮组成的齿轮机构往往是不够的。因此常常需要采用由一系列互 相啮合的齿轮组成的传动系统来满足不同的工作需要,这种由一系列的齿轮所组成的齿轮传动系 统称为齿轮系,简称轮系(gear train)。 7.1.1 轮系的功用 轮系在机械传动中应用非常广泛,可以用以实现分路传动、换向传动、变速传动、大传动 比传动及运动的合成与分解等。 如图 7-1a 所示为某航空发动机附件传动系统,通过轮系将主轴的运动分成六路传出,带动 各附件同时工作。 如图 7-1b 所示为车床上走刀丝杠的三星轮换向机构,在主动轮 1 转向不变的条件下,通过 改变手柄的位置,使齿轮 2 参与啮合或不参与啮合,以改变外啮合的次数,使从动轮 4 与主动轮 1 转向相反或相同。 如图 7-1c 所示,利用双联齿轮的滑移使主动轴转速不变的情况下,从动轴可获得两种不同 的转速。 如图 7-1d 所示,如果仅采用一对齿轮传动(如图虚线所示),必然会使两齿轮的尺寸相差 很大,这样不仅会使传动机构尺寸庞大,而且因小齿轮工作次数过多容易失效,所以一般情况下 一对齿轮传动的传动比要求 i 8 。而由图中实线可知,传动同样距离、同样大小的传动比,若 采用轮系,则各齿轮尺寸明显减小,结构也更紧凑。 如图 7-1e 所示,当以齿轮 1 和齿轮 3 为原动机,并且齿数满足某种关系时,则构件 H 的转 速是齿轮 1、3 转速的合成。这种特性在机床、计算机装置及补偿装置中具有广泛的应用。而在 汽车后桥差速器中确利用它作为运动分解装置,它将发动机传递过来的运动,通过构件 H 分解 为与左右车轮固联的齿轮 1、3 的独立运动
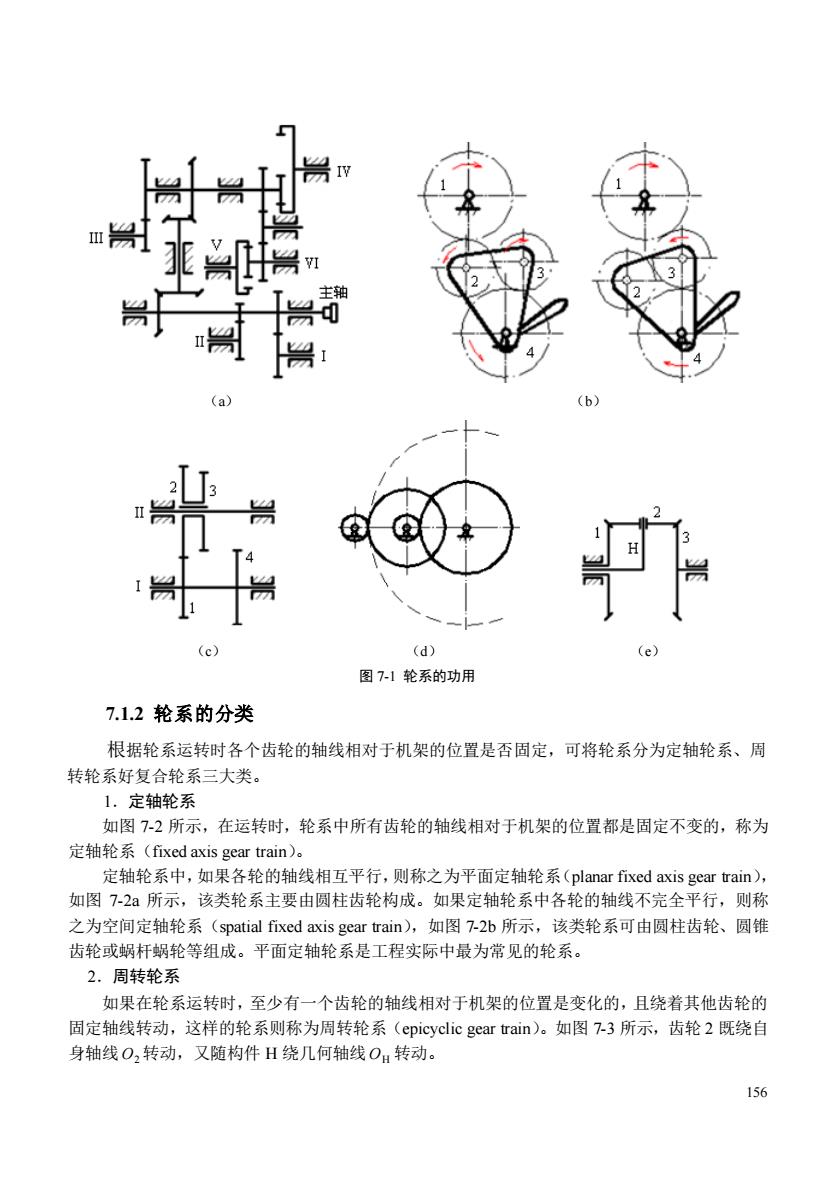
(d) (c】 图7-1轮系的功用 7.1.2轮系的分类 根据轮系运转时各个齿轮的轴线相对于机架的位置是否固定,可将轮系分为定轴轮系、周 转轮系好复合轮系三大类。 1.定轴轮系 如图7-2所示,在运转时,轮系中所有齿轮的轴线相对于机架的位置都是固定不变的,称为 定轴轮系((fixed axis gear train)。 定轴轮系中,如果各轮的轴线相互平行,则称之为平面定轴轮系(planar fixed axis gear train)。 如图7-2所示,该类轮系主要由圆柱齿轮构成。如果定轴轮系中各轮的轴线不完全平行,则称 之为空间定轴轮系(spatial fixed axis gear train),如图7-2b所示,该类轮系可由圆柱齿轮、圆锥 齿轮或蜗杆蜗轮等组成。平面定轴轮系是工程实际中最为常见的轮系。 2.周转轮系 如果在轮系运转时,至少有一个齿轮的轴线相对于机架的位置是变化的,且绕着其他齿轮的 固定轴线转动,这样的轮系则称为周转轮系(epicyclic gear train)。如图7-3所示,齿轮2既绕自 身轴线O2转动,又随构件H绕几何轴线O:转动。 156
156 (a) (b) (c) (d) (e) 图 7-1 轮系的功用 7.1.2 轮系的分类 根据轮系运转时各个齿轮的轴线相对于机架的位置是否固定,可将轮系分为定轴轮系、周 转轮系好复合轮系三大类。 1.定轴轮系 如图 7-2 所示,在运转时,轮系中所有齿轮的轴线相对于机架的位置都是固定不变的,称为 定轴轮系(fixed axis gear train)。 定轴轮系中,如果各轮的轴线相互平行,则称之为平面定轴轮系(planar fixed axis gear train), 如图 7-2a 所示,该类轮系主要由圆柱齿轮构成。如果定轴轮系中各轮的轴线不完全平行,则称 之为空间定轴轮系(spatial fixed axis gear train),如图 7-2b 所示,该类轮系可由圆柱齿轮、圆锥 齿轮或蜗杆蜗轮等组成。平面定轴轮系是工程实际中最为常见的轮系。 2.周转轮系 如果在轮系运转时,至少有一个齿轮的轴线相对于机架的位置是变化的,且绕着其他齿轮的 固定轴线转动,这样的轮系则称为周转轮系(epicyclic gear train)。如图 7-3 所示,齿轮 2 既绕自 身轴线 O2 转动,又随构件 H 绕几何轴线 OH 转动
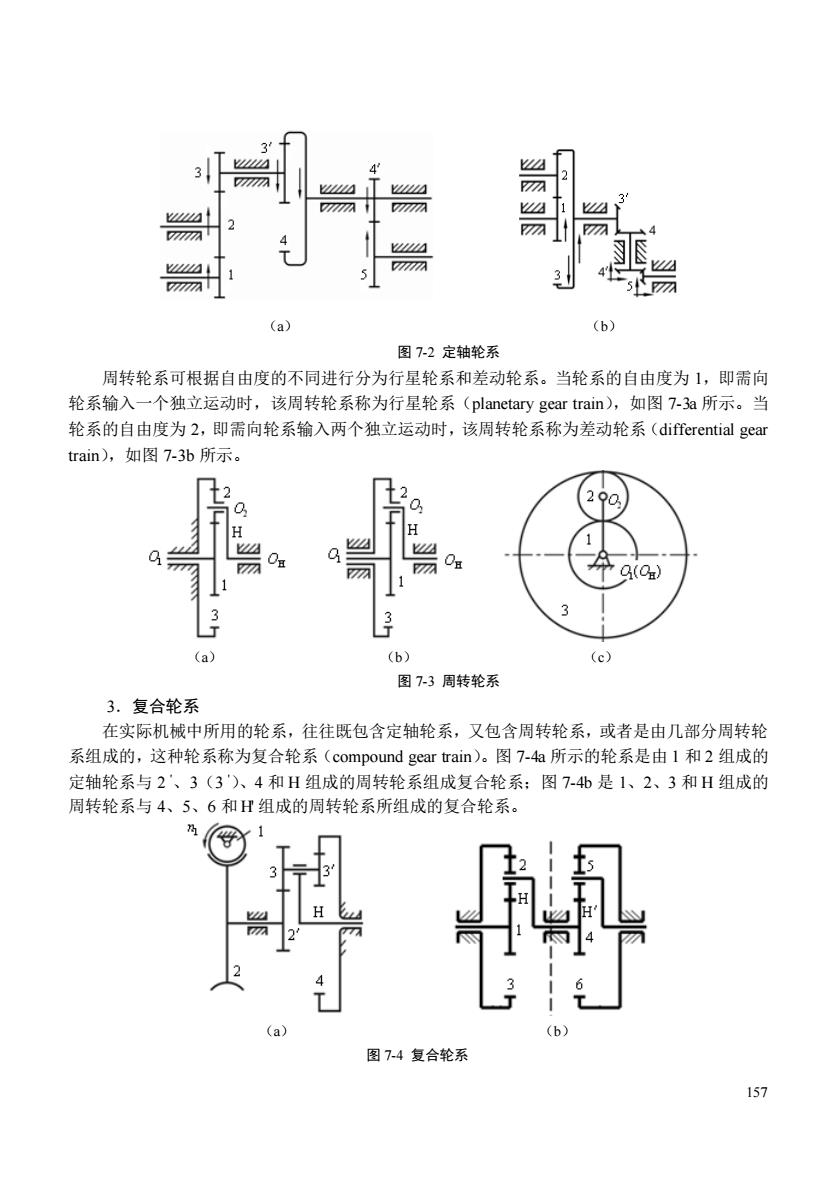
图7-2定轴轮系 周转轮系可根据自由度的不同进行分为行星轮系和差动轮系。当轮系的自由度为1,即需向 轮系输入一个独立运动时,该周转轮系称为行星轮系(planetary gear train),如图7-3a所示。当 轮系的自由度为2,即需向轮系输入两个独立运动时,该周转轮系称为差动轮系(differential gear train),如图7-3b所示。 (c) 图7-3周转轮系 3.复合轮系 在实际机械中所用的轮系,往往既包含定轴轮系,又包含周转轮系,或者是由几部分周转轮 系组成的,这种轮系称为复合轮系(compound gear train)。图7-4a所示的轮系是由1和2组成的 定轴轮系与2'、3(3')、4和H组成的周转轮系组成复合轮系:图7-4化是1、2、3和H组成的 周转轮系与4、5、6和H组成的周转轮系所组成的复合轮系。 图7-4复合轮系 157
157 (a) (b) 图 7-2 定轴轮系 周转轮系可根据自由度的不同进行分为行星轮系和差动轮系。当轮系的自由度为 1,即需向 轮系输入一个独立运动时,该周转轮系称为行星轮系(planetary gear train),如图 7-3a 所示。当 轮系的自由度为 2,即需向轮系输入两个独立运动时,该周转轮系称为差动轮系(differential gear train),如图 7-3b 所示。 (a) (b) (c) 图 7-3 周转轮系 3.复合轮系 在实际机械中所用的轮系,往往既包含定轴轮系,又包含周转轮系,或者是由几部分周转轮 系组成的,这种轮系称为复合轮系(compound gear train)。图 7-4a 所示的轮系是由 1 和 2 组成的 定轴轮系与 2 '、3(3 ')、4 和 H 组成的周转轮系组成复合轮系;图 7-4b 是 1、2、3 和 H 组成的 周转轮系与 4、5、6 和 H' 组成的周转轮系所组成的复合轮系。 (a) (b) 图 7-4 复合轮系
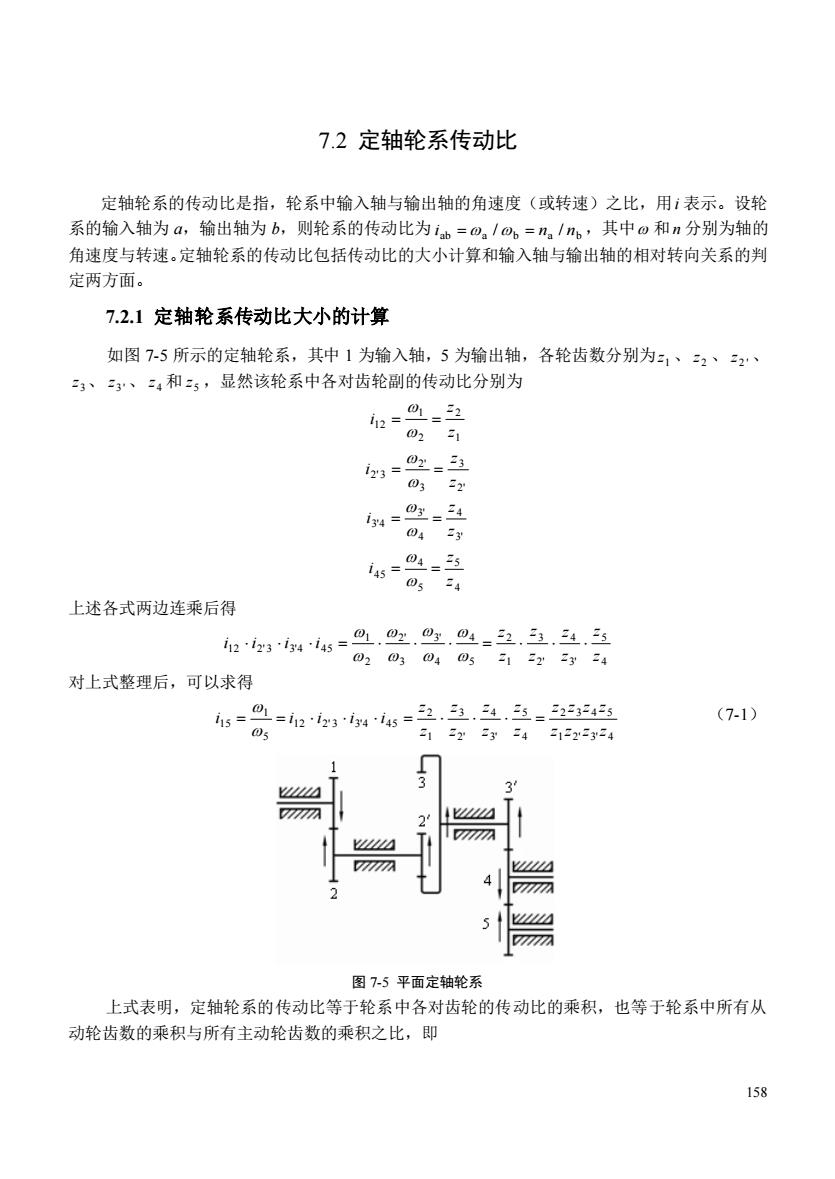
7.2定轴轮系传动比 定轴轮系的传动比是指,轮系中输入轴与输出轴的角速度(或转速)之比,用:表示。设轮 系的输入轴为a,输出轴为b,则轮系的传动比为i=a。/,=n,/m6,其中a和n分别为轴的 角速度与转速。定轴轮系的传动比包括传动比的大小计算和输入轴与输出轴的相对转向关系的判 定两方面。 7.2.1定轴轮系传动比大小的计算 如图7-5所示的定轴轮系,其中1为输入轴,5为输出轴,各轮齿数分别为1、2、2、 3、3、:4和:5,显然该轮系中各对齿轮副的传动比分别为 032 上述各式两边连乘后得 岛。品子吾子 对上式整理后,可以求得 (7-1 51525324 图75平面定轴轮系 上式表明,定轴轮系的传动比等于轮系中各对齿轮的传动比的乘积,也等于轮系中所有从 动轮齿数的乘积与所有主动轮齿数的乘积之比,即 158
158 7.2 定轴轮系传动比 定轴轮系的传动比是指,轮系中输入轴与输出轴的角速度(或转速)之比,用 i 表示。设轮 系的输入轴为 a,输出轴为 b,则轮系的传动比为 ab a b a b i = / = n / n ,其中 和 n 分别为轴的 角速度与转速。定轴轮系的传动比包括传动比的大小计算和输入轴与输出轴的相对转向关系的判 定两方面。 7.2.1 定轴轮系传动比大小的计算 如图 7-5 所示的定轴轮系,其中 1 为输入轴,5 为输出轴,各轮齿数分别为 1 z 、 2 z 、 2 ' z 、 3 z 、 3 ' z 、 4 z 和 5 z ,显然该轮系中各对齿轮副的传动比分别为 1 2 2 1 12 z z i = = 2' 3 3 2' 2' 3 z z i = = 3' 4 4 3' 3'4 z z i = = 4 5 5 4 45 z z i = = 上述各式两边连乘后得 4 5 3' 4 2' 3 1 2 5 4 4 3' 3 2' 2 1 12 2' 3 3'4 45 z z z z z z z z i i i i = = 对上式整理后,可以求得 1 2' 3' 4 2 3 4 5 4 5 3' 4 2' 3 1 2 12 2' 3 3'4 45 5 1 15 z z z z z z z z z z z z z z z z i = = i i i i = = (7-1) 图 7-5 平面定轴轮系 上式表明,定轴轮系的传动比等于轮系中各对齿轮的传动比的乘积,也等于轮系中所有从 动轮齿数的乘积与所有主动轮齿数的乘积之比,即
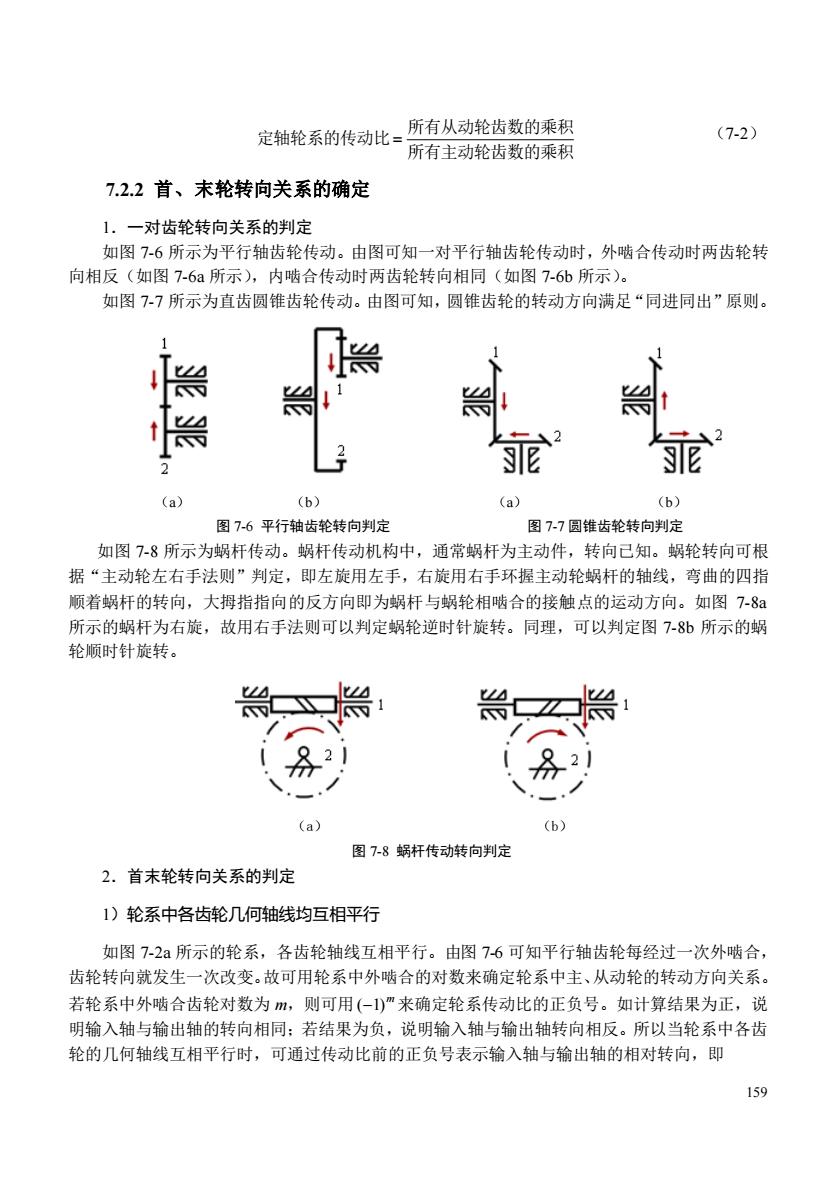
定轴轮系的传动比=所有从动轮齿数的乘积 (7-2) 所有主动轮齿数的乘积 7.2.2首、末轮转向关系的确定 1.一对齿轮转向关系的判定 如图7-6所示为平行轴齿轮传动。由图可知一对平行轴齿轮传动时,外啮合传动时两齿轮转 向相反(如图7-6a所示),内啮合传动时两齿轮转向相同(如图7-6b所示) 如图77所示为直齿圆锥齿轮传动。由图可知,圆锥齿轮的转动方向满足“同进同出”原则。 (a) (b) (a) (b) 图7:6平行轴货轮转向判圳定 图77圆锥齿轮转向判定 如图7-8所示为蜗杆传动。蜗杆传动机构中,通常蜗杆为主动件,转向己知。蜗轮转向可根 据“主动轮左右手法则”判定,即左旋用左手,右旋用右手环握主动轮蜗杆的轴线,弯曲的四指 顺着蜗杆的转向,大拇指指向的反方向即为蜗杆与蜗轮相啮合的接触点的运动方向。如图7-8a 所示的蜗杆为右旋,故用右手法则可以判定蜗轮逆时针旋转。同理,可以判定图7-8b所示的蜗 轮顺时针旋转。 821 2 分 (a) (b) 图7-8蜗杆传动转向判定 2.首未轮转向关系的判定 1)轮系中各齿轮几何轴线均互相平行 如图7-2所示的轮系,各齿轮轴线互相平行。由图7-6可知平行轴齿轮每经过一次外啮合, 齿轮转向就发生一次改变。故可用轮系中外啮合的对数来确定轮系中主、从动轮的转动方向关系。 若轮系中外啮合齿轮对数为m,则可用(-)"来确定轮系传动比的正负号。如计算结果为正,说 明输入轴与输出轴的转向相同:若结果为负,说明输入轴与输出轴转向相反。所以当轮系中各齿 轮的几何轴线互相平行时,可通过传动比前的正负号表示输入轴与输出轴的相对转向,即 159
159 所有主动轮齿数的乘积 所有从动轮齿数的乘积 定轴轮系的传动比 = (7-2) 7.2.2 首、末轮转向关系的确定 1.一对齿轮转向关系的判定 如图 7-6 所示为平行轴齿轮传动。由图可知一对平行轴齿轮传动时,外啮合传动时两齿轮转 向相反(如图 7-6a 所示),内啮合传动时两齿轮转向相同(如图 7-6b 所示)。 如图 7-7 所示为直齿圆锥齿轮传动。由图可知,圆锥齿轮的转动方向满足“同进同出”原则。 (a) (b) (a) (b) 图 7-6 平行轴齿轮转向判定 图 7-7 圆锥齿轮转向判定 如图 7-8 所示为蜗杆传动。蜗杆传动机构中,通常蜗杆为主动件,转向已知。蜗轮转向可根 据“主动轮左右手法则”判定,即左旋用左手,右旋用右手环握主动轮蜗杆的轴线,弯曲的四指 顺着蜗杆的转向,大拇指指向的反方向即为蜗杆与蜗轮相啮合的接触点的运动方向。如图 7-8a 所示的蜗杆为右旋,故用右手法则可以判定蜗轮逆时针旋转。同理,可以判定图 7-8b 所示的蜗 轮顺时针旋转。 (a) (b) 图 7-8 蜗杆传动转向判定 2.首末轮转向关系的判定 1)轮系中各齿轮几何轴线均互相平行 如图 7-2a 所示的轮系,各齿轮轴线互相平行。由图 7-6 可知平行轴齿轮每经过一次外啮合, 齿轮转向就发生一次改变。故可用轮系中外啮合的对数来确定轮系中主、从动轮的转动方向关系。 若轮系中外啮合齿轮对数为 m,则可用 m (−1) 来确定轮系传动比的正负号。如计算结果为正,说 明输入轴与输出轴的转向相同;若结果为负,说明输入轴与输出轴转向相反。所以当轮系中各齿 轮的几何轴线互相平行时,可通过传动比前的正负号表示输入轴与输出轴的相对转向,即