BUCT 机械创新设计 第9章创新实例与分析 一、创新思路的分析 第二届全国大学生机械创新设计大赛确定的大赛主题是“健康 与爱心”,内容包括:“助残机械、康复机械、健身机械、运 动训练机械等四类机械产品的创新设计与制作”。在助残机械 中可爬楼梯的轮椅成为不少学校的参赛作品选题。 轮椅爬楼梯最基本的要求就是将轮椅升高到 高一级的台阶上 为了实现这一要求,不同学校采用了不同方案
第9章 创新实例与分析 一、创新思路的分析 BUCT 机械创新设计 轮椅爬楼梯最基本的要求就是将轮椅升高到 高一级的台阶上 为了实现这一要求,不同学校采用了不同方案。 第二届全国大学生机械创新设计大赛确定的大赛主题是“健康 与爱心”,内容包括:“助残机械、康复机械、健身机械、运 动训练机械等四类机械产品的创新设计与制作”。在助残机械 中可爬楼梯的轮椅成为不少学校的参赛作品选题
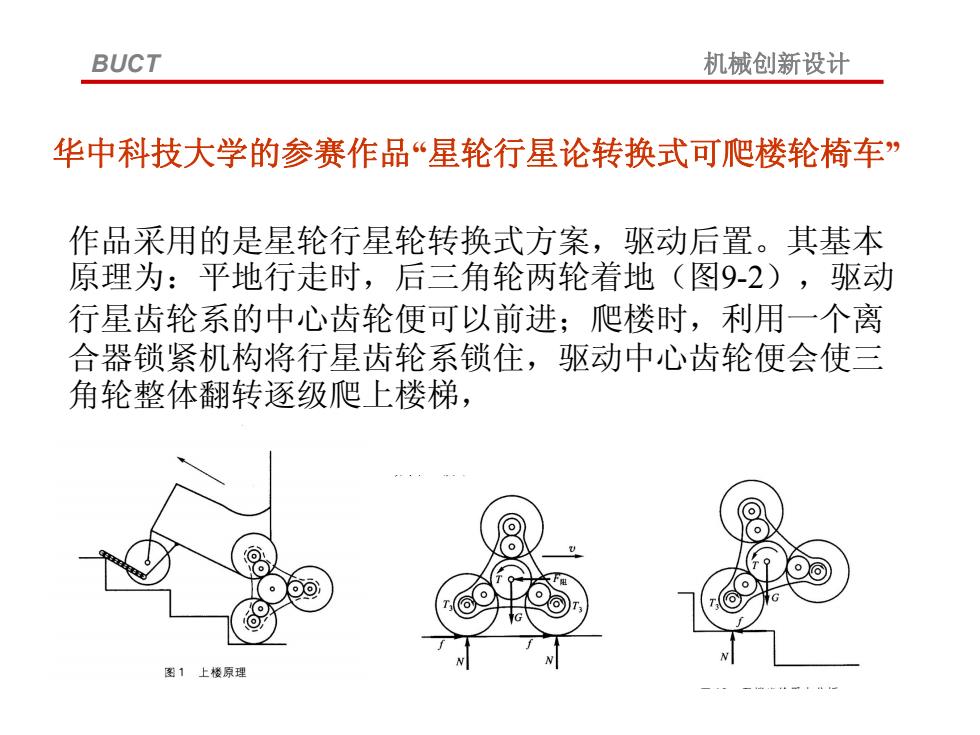
BUCT 机械创新设计 华中科技大学的参赛作品“星轮行星论转换式可爬楼轮椅车” 作品采用的是星轮行星轮转换式方案,驱动后置。其基本 原理为:平地行走时,后三角轮两轮着地(图9-2),驱动 行星齿轮系的中心齿轮便可以前进;爬楼时,利用一个离 合器锁紧机构将行星齿轮系锁住,驱动中心齿轮便会使三 角轮整体翻转逐级爬上楼梯, 图1上楼原理
华中科技大学的参赛作品 “星轮行星论转换式可爬楼轮椅车 ” 作品采用的是星轮行星轮转换式方案,驱动后置。其基本 原理为:平地行走时,后三角轮两轮着地(图9-2),驱动 行星齿轮系的中心齿轮便可以前进;爬楼时,利用一个离 合器锁紧机构将行星齿轮系锁住,驱动中心齿轮便会使三 角轮整体翻转逐级爬上楼梯, BUCT 机械创新设计
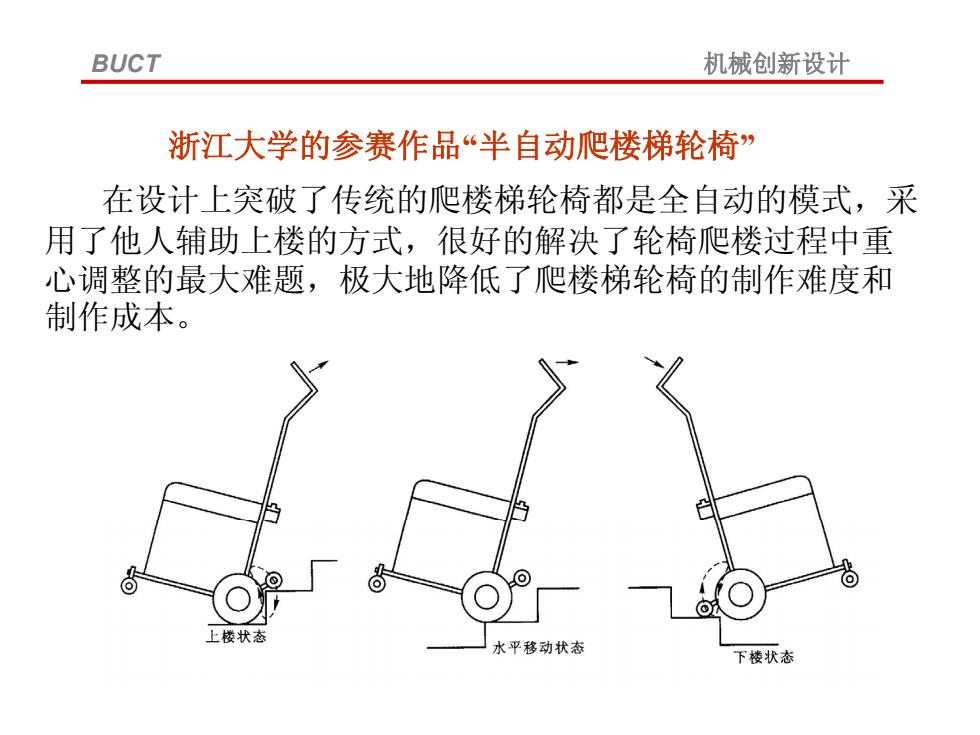
BUCT 机械创新设计 浙江大学的参赛作品“半自动爬楼梯轮椅” 在设计上突破了传统的爬楼梯轮椅都是全自动的模式,采 用了他人辅助上楼的方式,很好的解决了轮椅爬楼过程中重 心调整的最大难题,极大地降低了爬楼梯轮椅的制作难度和 制作成本。 5 上楼状态 水平移动状态 下楼状态
BUCT 机械创新设计 浙江大学的参赛作品“半自动爬楼梯轮椅” 在设计上突破了传统的爬楼梯轮椅都是全自动的模式,采 用了他人辅助上楼的方式,很好的解决了轮椅爬楼过程中重 心调整的最大难题,极大地降低了爬楼梯轮椅的制作难度和 制作成本
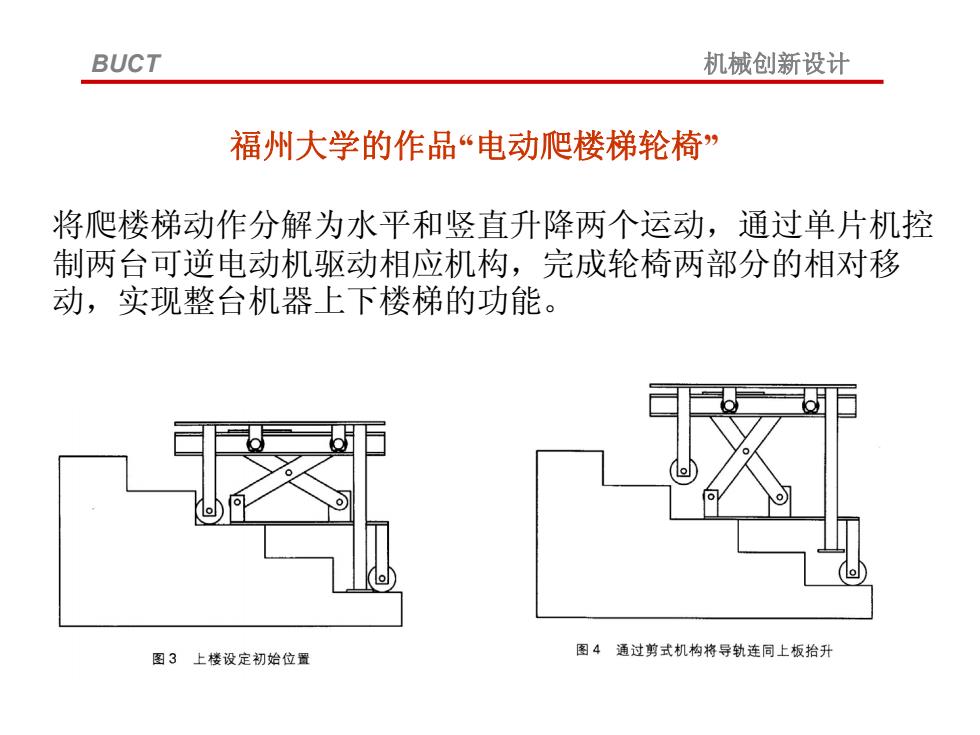
BUCT 机械创新设计 福州大学的作品“电动爬楼梯轮椅” 将爬楼梯动作分解为水平和竖直升降两个运动,通过单片机控 制两台可逆电动机驱动相应机构,完成轮椅两部分的相对移 动,实现整台机器上下楼梯的功能。 图3上楼设定初始位置 图4通过剪式机构将导轨连同上板拾升
BUCT 机械创新设计 福州大学的作品“电动爬楼梯轮椅” 将爬楼梯动作分解为水平和竖直升降两个运动,通过单片机控 制两台可逆电动机驱动相应机构,完成轮椅两部分的相对移 动,实现整台机器上下楼梯的功能

BUCT 机械创新设计 图5通过另一电动机将上板向前推出 图6以导轨和上板为机架,反向使用剪式机构将另一套支持脚收起 图7以上板为机架往前拉导轨进入初始状态
BUCT 机械创新设计