第九章机械中的摩擦和效率 内容提要 本章主要介绍运动副中的摩擦,考虑摩擦时机构的受力分析以及与摩擦有关的机械效率的 计算、自锁条件的判定问题,最后介绍提高机械效率的途径。 9.1概述 运动副作为机构运动和动力传递的媒介,运动副元素之间的一切直接接触在构件具有相对运 动和运动趋势时,必然会产生摩擦力。机构运转过程中,各运动副中的摩擦力是一种有害的阻力, 它一方面消耗输入功,造成动力浪费,降低机械效率:另一方面造成运动副元素磨损,从而削弱 零件强度,降低机械运动精度、可靠性和使用寿命:此外摩擦还会使运动副温度升高,破坏正常 的润滑条件,出现配合性质变化甚至卡死现象,使机械无法正常工作。据资料统计,世界能源约 有13-1/2消耗于摩擦,报废机械零件中约80%是由于磨损引起的。 通常,机械中的摩擦超大,效率越低。当低到一定程度时,机械就会出现自锁。所以摩擦、 效率和自锁是一个问题的三个方面,其中心问题是摩擦。因此,本章主要研究常见运动副中的摩 擦、效率和自锁问题。 需要注意的是,摩擦也有可利用的一面。主要表现为,可以利用摩擦传递动力和能量,例如 摩擦轮传动、带传动、摩擦离合器、制动器、需要自锁的机械等。 9.2运动副中的摩擦 在平面机构中,常见的运动副有移动副、转动副和高副三种。其中属于低副的移动副和转动 副中只有滑动摩擦产生,而高副中既有滑动摩擦又有滚动摩擦,由于滚动摩擦较滑动摩擦小很多, 故常常忽略不计,所以对高副中的摩擦分析同移动副摩擦一样。 讨论运动副中的摩擦,重要的工作是确定运动副中总反力的大小、方向及作用点位置,从而 可以方便地判断它们对构件运动和受力的影响。 9.2.1移动副中的摩擦 移动副中的摩擦是运动副摩擦的一种简单的方式,广泛存在于机械运动中。常见的有三种情 196
196 第九章 机械中的摩擦和效率 内容提要 本章主要介绍运动副中的摩擦,考虑摩擦时机构的受力分析以及与摩擦有关的机械效率的 计算、自锁条件的判定问题,最后介绍提高机械效率的途径。 9.1 概述 运动副作为机构运动和动力传递的媒介,运动副元素之间的一切直接接触在构件具有相对运 动和运动趋势时,必然会产生摩擦力。机构运转过程中,各运动副中的摩擦力是一种有害的阻力, 它一方面消耗输入功,造成动力浪费,降低机械效率;另一方面造成运动副元素磨损,从而削弱 零件强度,降低机械运动精度、可靠性和使用寿命;此外摩擦还会使运动副温度升高,破坏正常 的润滑条件,出现配合性质变化甚至卡死现象,使机械无法正常工作。据资料统计,世界能源约 有 1/3~1/2 消耗于摩擦,报废机械零件中约 80%是由于磨损引起的。 通常,机械中的摩擦越大,效率越低。当低到一定程度时,机械就会出现自锁。所以摩擦、 效率和自锁是一个问题的三个方面,其中心问题是摩擦。因此,本章主要研究常见运动副中的摩 擦、效率和自锁问题。 需要注意的是,摩擦也有可利用的一面。主要表现为,可以利用摩擦传递动力和能量,例如 摩擦轮传动、带传动、摩擦离合器、制动器、需要自锁的机械等。 9.2 运动副中的摩擦 在平面机构中,常见的运动副有移动副、转动副和高副三种。其中属于低副的移动副和转动 副中只有滑动摩擦产生,而高副中既有滑动摩擦又有滚动摩擦,由于滚动摩擦较滑动摩擦小很多, 故常常忽略不计,所以对高副中的摩擦分析同移动副摩擦一样。 讨论运动副中的摩擦,重要的工作是确定运动副中总反力的大小、方向及作用点位置,从而 可以方便地判断它们对构件运动和受力的影响。 9.2.1 移动副中的摩擦 移动副中的摩擦是运动副摩擦的一种简单的方式,广泛存在于机械运动中。常见的有三种情
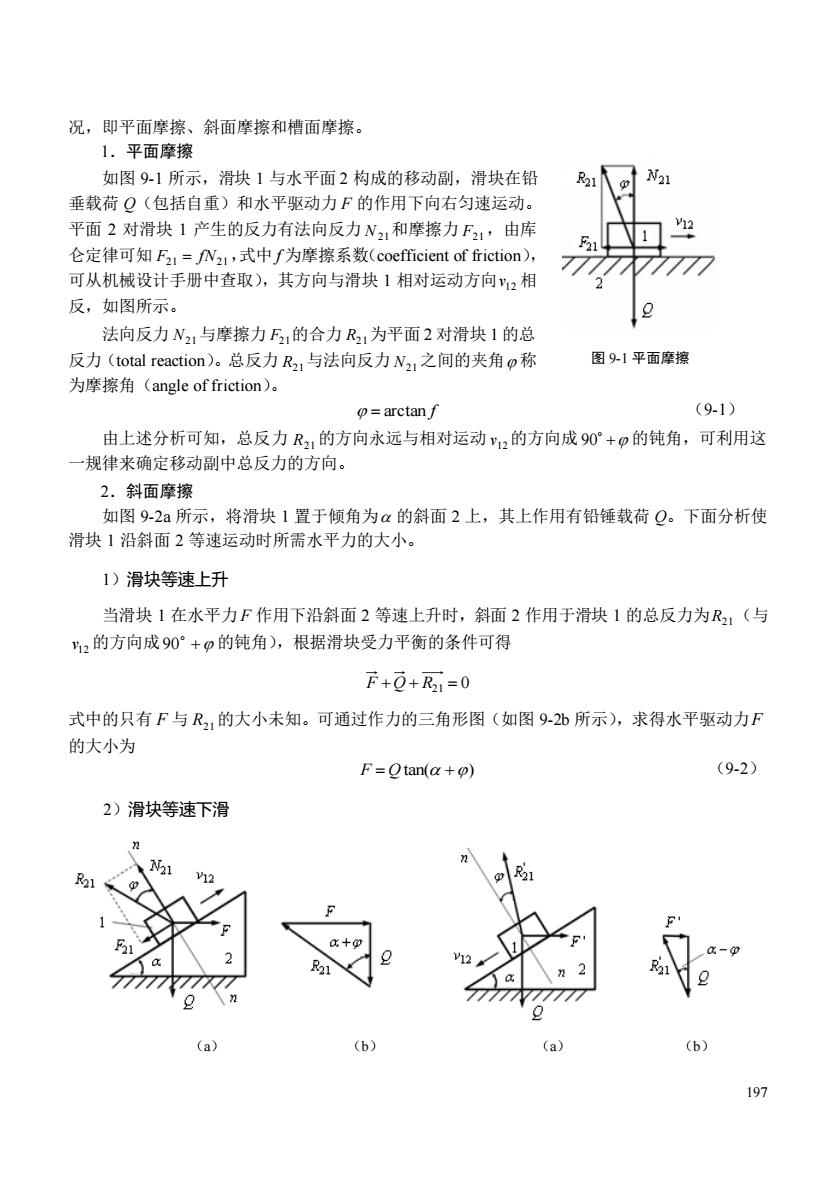
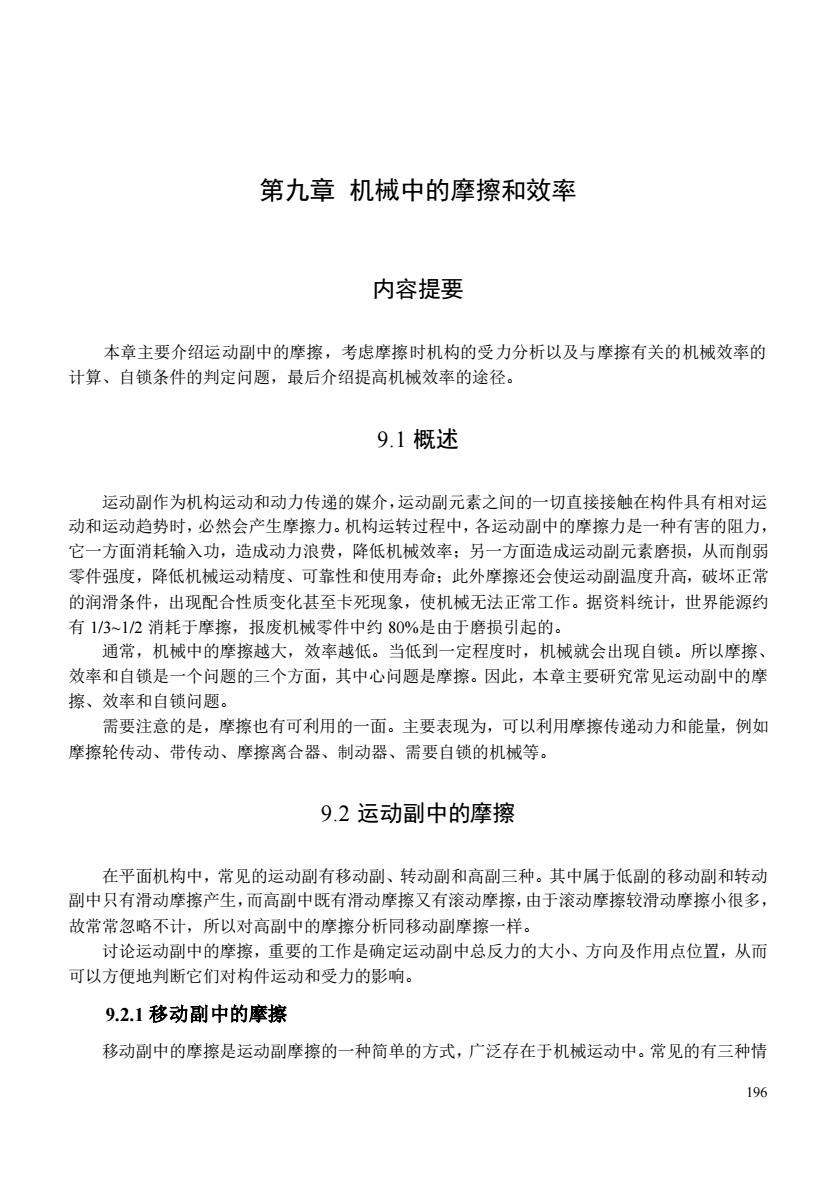
况,即平面摩擦、斜面摩擦和槽面摩擦。 1.平面摩擦 如图91所示,滑块1与水平面2构成的移动副,滑块在铅 垂载荷Q(包括自重)和水平驱动力F的作用下向右匀速运动。 平面2对滑块1产生的反力有法向反力N21和摩擦力F21,由库 仑定律可知F,=N21,式中f为摩擦系数(coefficient of friction), 可从机械设计手册中查取),其方向与滑块1相对运动方向2相 反,如图所示。 法向反力N21与摩擦力F,的合力R21为平面2对滑块1的总 反力(total reaction)。总反力R2,与法向反力N21之间的夹角p称 图91平面摩擦 为摩擦角(angle of friction)。 o=arctanf (9.1) 由上述分析可知,总反力R2!的方向永远与相对运动”2的方向成90°+Q的钝角,可利用这 规律来确定移动副中总反力的方向。 2。斜面磨容 如图9-2a所示,将滑块1置于倾角为α的斜面2上,其上作用有铅锤载荷Q。下面分析使 滑块1沿斜面2等速运动时所需水平力的大小。 1)滑块等速上升 当滑块1在水平力F作用下沿斜面2等速上升时,斜面2作用于滑块1的总反力为R2,(与 2的方向成90°+0的纯角),根据滑块受力平衡的条件可得 F+O+R1=0 式中的只有F与R,的大小未知。可通过作力的三角形图(如图9-2b所示),求得水平驱动力F 的大小为 F=Otan(a+o) (9-2) 2)滑块等速下滑 a
197 况,即平面摩擦、斜面摩擦和槽面摩擦。 1.平面摩擦 如图 9-1 所示,滑块 1 与水平面 2 构成的移动副,滑块在铅 垂载荷 Q(包括自重)和水平驱动力 F 的作用下向右匀速运动。 平面 2 对滑块 1 产生的反力有法向反力 N21 和摩擦力 F21,由库 仑定律可知 21 21 F = fN ,式中 f 为摩擦系数(coefficient of friction), 可从机械设计手册中查取),其方向与滑块 1 相对运动方向 12 v 相 反,如图所示。 法向反力 N21 与摩擦力 F21 的合力 R21 为平面 2 对滑块 1 的总 反力(total reaction)。总反力 R21 与法向反力 N21 之间的夹角 称 为摩擦角(angle of friction)。 = arctan f (9-1) 由上述分析可知,总反力 R21 的方向永远与相对运动 12 v 的方向成 + 90 的钝角,可利用这 一规律来确定移动副中总反力的方向。 2.斜面摩擦 如图 9-2a 所示,将滑块 1 置于倾角为 的斜面 2 上,其上作用有铅锤载荷 Q。下面分析使 滑块 1 沿斜面 2 等速运动时所需水平力的大小。 1)滑块等速上升 当滑块 1 在水平力 F 作用下沿斜面 2 等速上升时,斜面 2 作用于滑块 1 的总反力为 R21 (与 12 v 的方向成 + 90 的钝角),根据滑块受力平衡的条件可得 F + Q + R21 = 0 式中的只有 F 与 R21 的大小未知。可通过作力的三角形图(如图 9-2b 所示),求得水平驱动力 F 的大小为 F = Q tan( +) (9-2) 2)滑块等速下滑 (a) (b) (a) (b) 图 9-1 平面摩擦

图9-2滑块等速上升 图9-3滑块等速下滑 如图9-3所示,当滑块1在水平力F作用下沿斜面2等速下滑时,斜面2作用于滑块1的 总反力为R,(与v,的方向成90°+的钝角),根据滑块受力平衡的条件可得 F+0+R1=0 式中只有F与R2,的大小未知。同理,通过作力的三角形图(如图93b所示),求得水平驱动力 F的大小 F=Otan(a-0) (9.3) 值得注意的是,当滑块1等速上滑时,力F为驱动力:而当滑块1下滑时,F为阻抗力, 其作用是阻止滑块1加速下滑。如果把力F为驱动力的行程称为正行程:把力F为阻抗力的行 程称为反行程。由式(9-2)和式(9-3)可知,当已经列出了正行程的关系式时,只需将摩擦角 的符号改变,便可以得到反行程的关系式。 3槽面摩擦 如图9-4a所示,楔形滑块1放在夹角为28的槽面2上,在水平驱动力作用下,沿着槽面等 速滑动。Q为作用在滑块上的铅垂载荷,N2,为槽面给滑块1的法向反力。根据楔形块1在铅垂 方向受力平衡,如图94b所示,可得 故摩擦力的大小为 F=N-/品。 若令 (9-4) 色 F=fO (9-5) 式中,人,称当量摩擦系数(equivalent of friction),相当于把楔形滑块视为平滑块时的 摩擦系数。与之对应的摩擦角g,=arctan∫称为当量摩擦角(equivalent angle of friction)。 (a) (b) 198
198 图 9-2 滑块等速上升 图 9-3 滑块等速下滑 如图 9-3a 所示,当滑块 1 在水平力 F' 作用下沿斜面 2 等速下滑时,斜面 2 作用于滑块 1 的 总反力为 ' R21 (与 12 v 的方向成 + 90 的钝角),根据滑块受力平衡的条件可得 F ' + Q + R21 = 0 式中只有 F' 与 R21 的大小未知。同理,通过作力的三角形图(如图 9-3b 所示),求得水平驱动力 F' 的大小 F' = Qtan( −) (9-3) 值得注意的是,当滑块 1 等速上滑时,力 F 为驱动力;而当滑块 1 下滑时, F' 为阻抗力, 其作用是阻止滑块 1 加速下滑。如果把力 F 为驱动力的行程称为正行程;把力 F' 为阻抗力的行 程称为反行程。由式(9-2)和式(9-3)可知,当已经列出了正行程的关系式时,只需将摩擦角 的符号改变,便可以得到反行程的关系式。 3.槽面摩擦 如图 9-4a 所示,楔形滑块 1 放在夹角为 2 的槽面 2 上,在水平驱动力作用下,沿着槽面等 速滑动。Q 为作用在滑块上的铅垂载荷, N21 为槽面给滑块 1 的法向反力。根据楔形块 1 在铅垂 方向受力平衡,如图 9-4b 所示,可得 21 sin Q N = 故摩擦力的大小为 21 21 sin Q F fN f = = 若令 v sin f f = (9-4) 则 F21 = f vQ (9-5) 式中, v f 称当量摩擦系数(equivalent coefficient of friction),相当于把楔形滑块视为平滑块时的 摩擦系数。与之对应的摩擦角 v v = arctan f 称为当量摩擦角(equivalent angle of friction)。 (a) (b)
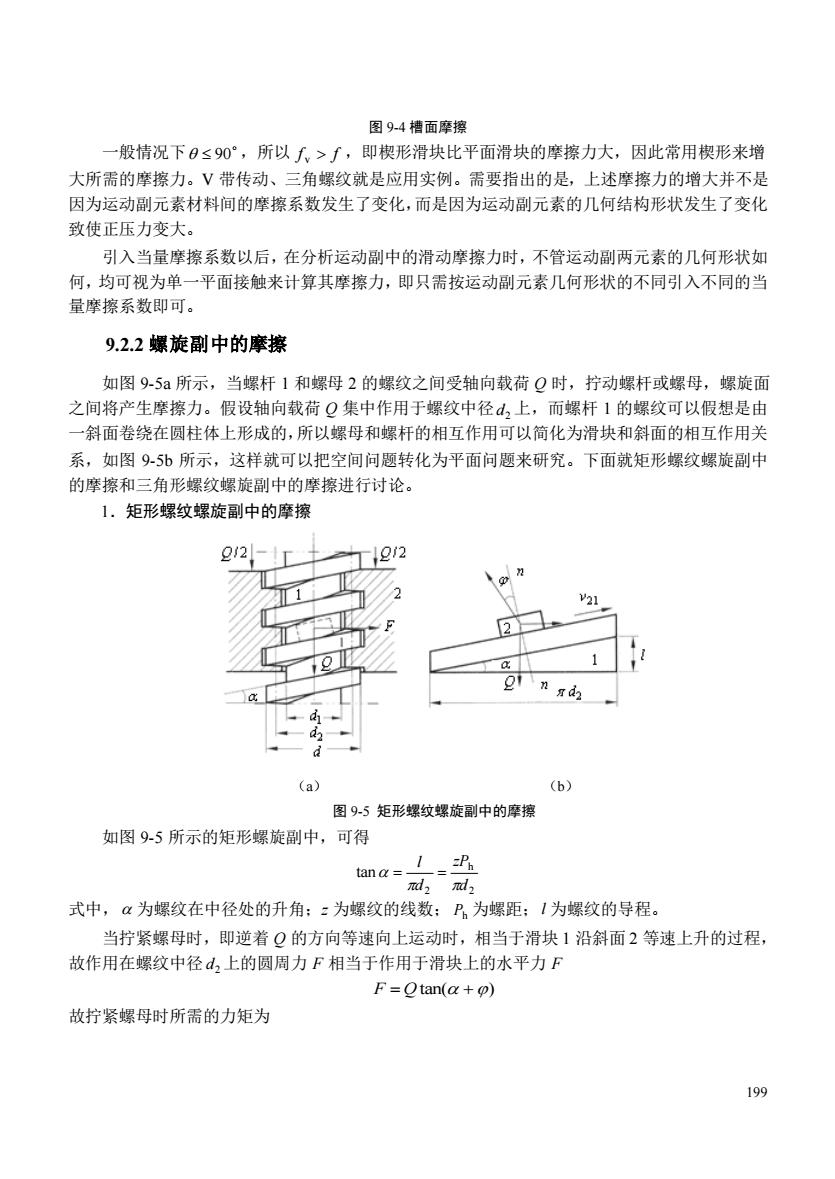
图94槽面摩擅 般情况下0≤90°,所以人>∫,即楔形滑块比平面滑块的摩擦力大,因此常用楔形来增 大所需的摩擦力。V带传动、三角螺纹就是应用实例。需要指出的是,上述摩擦力的增大并不是 因为运动副元素材料间的摩擦系数发生了变化,而是因为运动副元素的几何结构形状发生了变化 致使正压力变大。 引入当量摩擦系数以后,在分析运动副中的滑动摩擦力时,不管运动副两元素的几何形状如 何,均可视为单一平面接触来计算其摩擦力,即只需按运动副元素几何形状的不同引入不同的当 量摩擦系数即可。 9.2.2螺旋副中的摩擦 如图9-5所示,当螺杆1和螺母2的螺纹之间受轴向载荷Q时,拧动螺杆或螺母,螺旋面 之间将产生摩擦力。假设轴向载荷Q集中作用于螺纹中径山上,而螺杆1的螺纹可以假想是由 一斜面卷绕在圆柱体上形成的,所以螺母和螺杆的相互作用可以简化为滑块和斜面的相互作用关 系,如图95b所示,这样就可以把空间问题转化为平面问题来研究。下面就矩形螺纹螺旋副中 的摩擦和三角形螺纹螺旋副中的摩擦进行讨论。 1.矩形螺纹螺旋副中的摩擦 22,-1 Te/2 (a) (b) 图95矩形螺纹螺旋副中的摩擦 如图95所示的矩形螺旋副中,可得 tana=- nd2 nd2 式中,α为螺纹在中径处的升角::为螺纹的线数:P,为螺距:I为螺纹的导程。 当拧紧螺母时,即逆着Q的方向等速向上运动时,相当于滑块1沿斜面2等速上升的过程, 故作用在螺纹中径山,上的圆周力F相当于作用于滑块上的水平力F F=Otan(a+) 故拧紧螺母时所需的力矩为 199
199 图 9-4 槽面摩擦 一般情况下 90 ,所以 f f v ,即楔形滑块比平面滑块的摩擦力大,因此常用楔形来增 大所需的摩擦力。V 带传动、三角螺纹就是应用实例。需要指出的是,上述摩擦力的增大并不是 因为运动副元素材料间的摩擦系数发生了变化,而是因为运动副元素的几何结构形状发生了变化 致使正压力变大。 引入当量摩擦系数以后,在分析运动副中的滑动摩擦力时,不管运动副两元素的几何形状如 何,均可视为单一平面接触来计算其摩擦力,即只需按运动副元素几何形状的不同引入不同的当 量摩擦系数即可。 9.2.2 螺旋副中的摩擦 如图 9-5a 所示,当螺杆 1 和螺母 2 的螺纹之间受轴向载荷 Q 时,拧动螺杆或螺母,螺旋面 之间将产生摩擦力。假设轴向载荷 Q 集中作用于螺纹中径 2 d 上,而螺杆 1 的螺纹可以假想是由 一斜面卷绕在圆柱体上形成的,所以螺母和螺杆的相互作用可以简化为滑块和斜面的相互作用关 系,如图 9-5b 所示,这样就可以把空间问题转化为平面问题来研究。下面就矩形螺纹螺旋副中 的摩擦和三角形螺纹螺旋副中的摩擦进行讨论。 1.矩形螺纹螺旋副中的摩擦 (a) (b) 图 9-5 矩形螺纹螺旋副中的摩擦 如图 9-5 所示的矩形螺旋副中,可得 2 h 2 tan d zP d l = = 式中, 为螺纹在中径处的升角;z 为螺纹的线数; Ph 为螺距; l 为螺纹的导程。 当拧紧螺母时,即逆着 Q 的方向等速向上运动时,相当于滑块 1 沿斜面 2 等速上升的过程, 故作用在螺纹中径 2 d 上的圆周力 F 相当于作用于滑块上的水平力 F F = Q tan( +) 故拧紧螺母时所需的力矩为
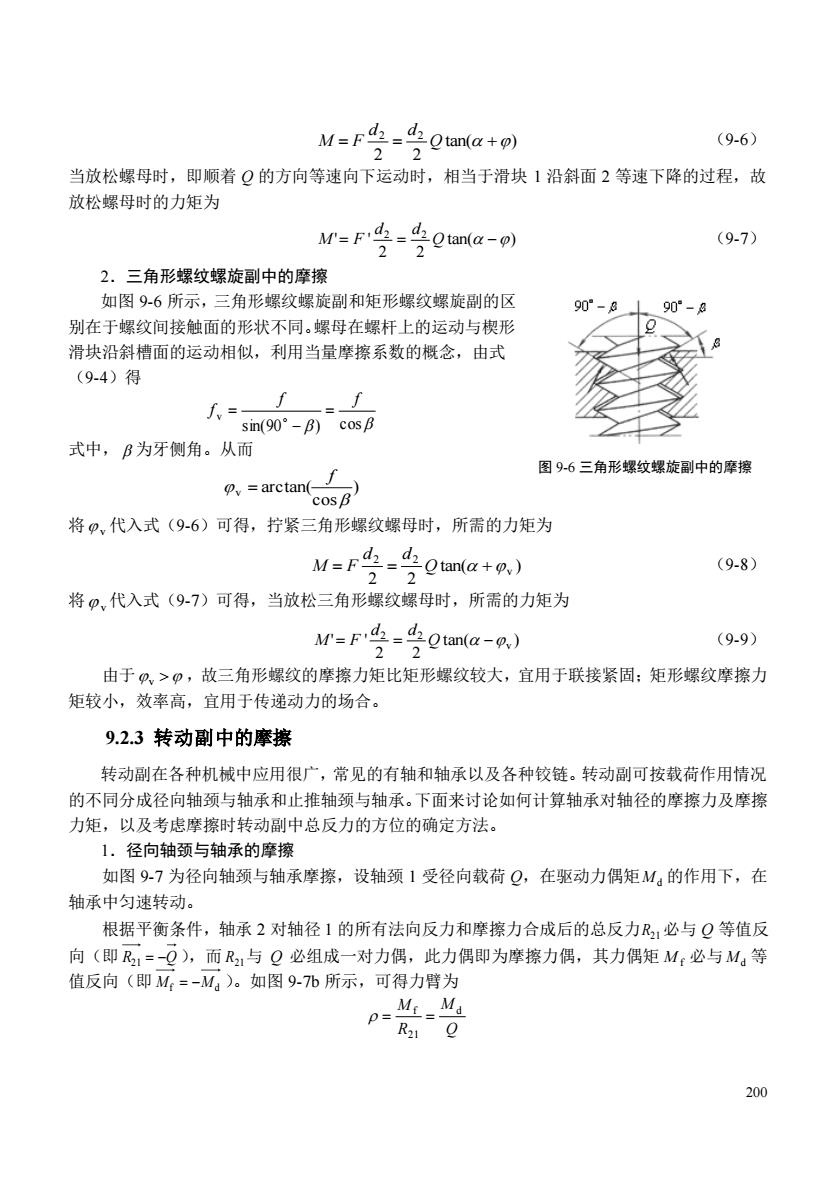
M=Fd=d Quan(a+ (9-6) 当放松螺母时,即顺着Q的方向等速向下运动时,相当于滑块1沿斜面2等速下降的过程,故 放松螺母时的力矩为 F'受-受0ma-p (9-7) 2 2.三角形螺纹螺旋副中的摩擦 如图96所示,三角形螺纹螺旋刷和矩形螺纹螺旋剧的风 别在于螺纹间接触面的形状不同。螺母在螺杆上的运动与楔形 滑块沿斜槽面的运动相似,利用当量摩擦系数的概念,由式 (94)得 式中,B为牙侧角。从而 .c 图96三角形螺纹螺旋副中的摩 将,代入式(9-6)可得,拧紧三角形螺纹螺母时,所需的力矩为 M=F=Qtan(a+,) (9-8) 将,代入式(97)可得,当放松三角形螺纹螺母时,所需的力矩为 =F-受Qtma-a) (9-9) 由于口,>口,故三角形螺纹的摩擦力矩比矩形螺纹较大,宜用于联接紧固:矩形螺纹摩擦力 矩较小,效率高,宜用于传递动力的场合。 9.2.3转动副中的摩擦 转动副在各种机械中应用很广,常见的有轴和轴承以及各种铰链。转动副可按载荷作用情况 的不同分成径向轴颈与轴承和止推轴颈与轴承。下面来讨论如何计算轴承对轴径的摩擦力及摩擦 力矩,以及考虑摩擦时转动副中总反力的方位的确定方法。 1.径向轴颈与轴承的摩擦 如图97为径向轴颈与轴承摩擦,设轴颈1受径向载荷Q,在驱动力偶矩M:的作用下,在 轴承中匀速转动。 根据平衡条件,轴承2对轴径1的所有法向反力和摩擦力合成后的总反力R,必与Q等值反 向(即风=),而R1与Q必组成一对力偶,此力偶即为摩擦力偶,其力偶矩M:必与M:等 值反向(即M=-M:)。如图97b所示,可得力臂为 p M:Ma 200
200 tan( ) 2 2 2 2 = = Q + d d M F (9-6) 当放松螺母时,即顺着 Q 的方向等速向下运动时,相当于滑块 1 沿斜面 2 等速下降的过程,故 放松螺母时的力矩为 tan( ) 2 2 ' ' 2 2 = = Q − d d M F (9-7) 2.三角形螺纹螺旋副中的摩擦 如图 9-6 所示,三角形螺纹螺旋副和矩形螺纹螺旋副的区 别在于螺纹间接触面的形状不同。螺母在螺杆上的运动与楔形 滑块沿斜槽面的运动相似,利用当量摩擦系数的概念,由式 (9-4)得 sin(90 ) cos v f f f = − = 式中, 为牙侧角。从而 ) cos arctan( v f = 将 v 代入式(9-6)可得,拧紧三角形螺纹螺母时,所需的力矩为 tan( ) 2 2 v 2 2 = = Q + d d M F (9-8) 将 v 代入式(9-7)可得,当放松三角形螺纹螺母时,所需的力矩为 tan( ) 2 2 ' ' v 2 2 = = Q − d d M F (9-9) 由于 v ,故三角形螺纹的摩擦力矩比矩形螺纹较大,宜用于联接紧固;矩形螺纹摩擦力 矩较小,效率高,宜用于传递动力的场合。 9.2.3 转动副中的摩擦 转动副在各种机械中应用很广,常见的有轴和轴承以及各种铰链。转动副可按载荷作用情况 的不同分成径向轴颈与轴承和止推轴颈与轴承。下面来讨论如何计算轴承对轴径的摩擦力及摩擦 力矩,以及考虑摩擦时转动副中总反力的方位的确定方法。 1.径向轴颈与轴承的摩擦 如图 9-7 为径向轴颈与轴承摩擦,设轴颈 1 受径向载荷 Q,在驱动力偶矩 Md 的作用下,在 轴承中匀速转动。 根据平衡条件,轴承 2 对轴径 1 的所有法向反力和摩擦力合成后的总反力 R21 必与 Q 等值反 向(即 R21 = −Q ),而 R21 与 Q 必组成一对力偶,此力偶即为摩擦力偶,其力偶矩 M f 必与 Md 等 值反向(即 Mf = −Md )。如图 9-7b 所示,可得力臂为 Q M R M d 21 f = = 图 9-6 三角形螺纹螺旋副中的摩擦