dLuAr(2-7)ds282式(2-6),(2-7)表明,电感L与气隙8成反比,灵敏度S与8”成反比:越小,灵敏度越高,故适宜测量小位移。为了减小非线性误差,通常规定在较小间隙变化范围内工作,一般允许A8/8≤0.1~0.2,测量范围为0.001~1mm。有时为了提高灵敏度和线性度,可采用差动变磁阻(变隙)型式。如图2-6所示。(二)自感式传感器的典型应用图2-6列出了几种常用自感式传感器的典型结构。图(a)是可变导磁面积型,其自感L与导磁面积A。成线性关系,但这种传感器灵敏度比较低:图(b)是差动型,衔铁位移时,可以使两个线圈的间隙分别按8.十△8、8一A8变化,即一个线圈的电感增加,而另一个线圈的电感减小。若将丙线圈接入电桥的相邻臂,由于电桥的加、减特性,其电桥的输出灵敏度可提高一倍,并改善了线性度图(c)是单螺线管式,传感器工作时,活动衔铁随被测体同步移动,从而改变磁阻,使线圈电感发生变化。这种传感器的优点是结构简单,便于制造,线性度好,可用于较大位移(数毫米)测量:其缺点是灵敏度低;图(d)是双螺线管差动型,其灵敏度和线性度均优于单螺线管型,用于位移测量,这种传感器的后续调理电路一般为电桥电路AA真:th(a)Lc(d)2-6自感式传感器典型结构图(c)单螺线管型(a)可变导磁面积型(b)差动变隙式(d)双螺线管差动型二、互感式传感器(差动变压器)把被测量的变化转换为线圈互感量变化的传感器称互感式传感器,又称差动变压器。(一)工作原理互感式传感器的结构及工作原理如图2-7(a)(b)所示,由初级线圈團进与两个参数完全相同的次级线圈W、W,及插入的可移动铁芯P组成01两个次级线圈反极性串联。当初级线圈W输入交流电压时(c在次级线圈W、W,中分别产生感应图2-7互感式传感器工作原理(a)结构示意图(c)输出特性b)原理!
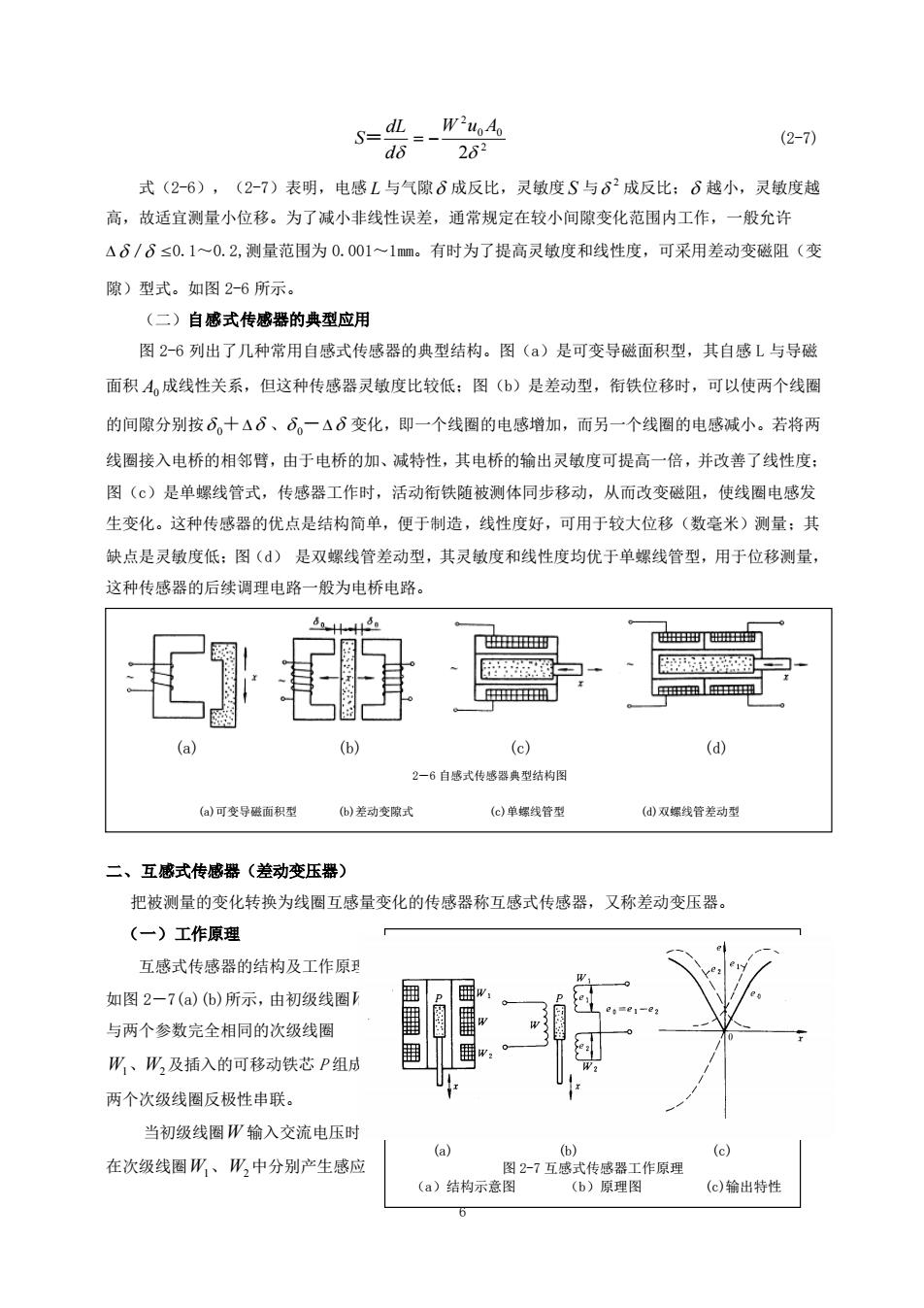
6 2 0 0 2 2 W u A d dL S= = − (2-7) 式(2-6),(2-7)表明,电感 L 与气隙 成反比,灵敏度 S 与 2 成反比; 越小,灵敏度越 高,故适宜测量小位移。为了减小非线性误差,通常规定在较小间隙变化范围内工作,一般允许 / ≤0.1~0.2,测量范围为 0.001~1mm。有时为了提高灵敏度和线性度,可采用差动变磁阻(变 隙)型式。如图 2-6 所示。 (二)自感式传感器的典型应用 图 2-6 列出了几种常用自感式传感器的典型结构。图(a)是可变导磁面积型,其自感 L 与导磁 面积 A0 成线性关系,但这种传感器灵敏度比较低;图(b)是差动型,衔铁位移时,可以使两个线圈 的间隙分别按 0+ 、 0- 变化,即一个线圈的电感增加,而另一个线圈的电感减小。若将两 线圈接入电桥的相邻臂,由于电桥的加、减特性,其电桥的输出灵敏度可提高一倍,并改善了线性度; 图(c)是单螺线管式,传感器工作时,活动衔铁随被测体同步移动,从而改变磁阻,使线圈电感发 生变化。这种传感器的优点是结构简单,便于制造,线性度好,可用于较大位移(数毫米)测量;其 缺点是灵敏度低;图(d) 是双螺线管差动型,其灵敏度和线性度均优于单螺线管型,用于位移测量, 这种传感器的后续调理电路一般为电桥电路。 二、互感式传感器(差动变压器) 把被测量的变化转换为线圈互感量变化的传感器称互感式传感器,又称差动变压器。 (一)工作原理 互感式传感器的结构及工作原理 如图 2-7(a)(b)所示,由初级线圈 W 与两个参数完全相同的次级线圈 W1、W2 及插入的可移动铁芯 P 组成, 两个次级线圈反极性串联。 当初级线圈 W 输入交流电压时, 在次级线圈 W1、W2 中分别产生感应 (a) (b) (c) 图 2-7 互感式传感器工作原理 (a)结构示意图 (b)原理图 (c)输出特性 (a) (b) (c) (d) 2-6 自感式传感器典型结构图 (a)可变导磁面积型 (b)差动变隙式 (c)单螺线管型 (d)双螺线管差动型
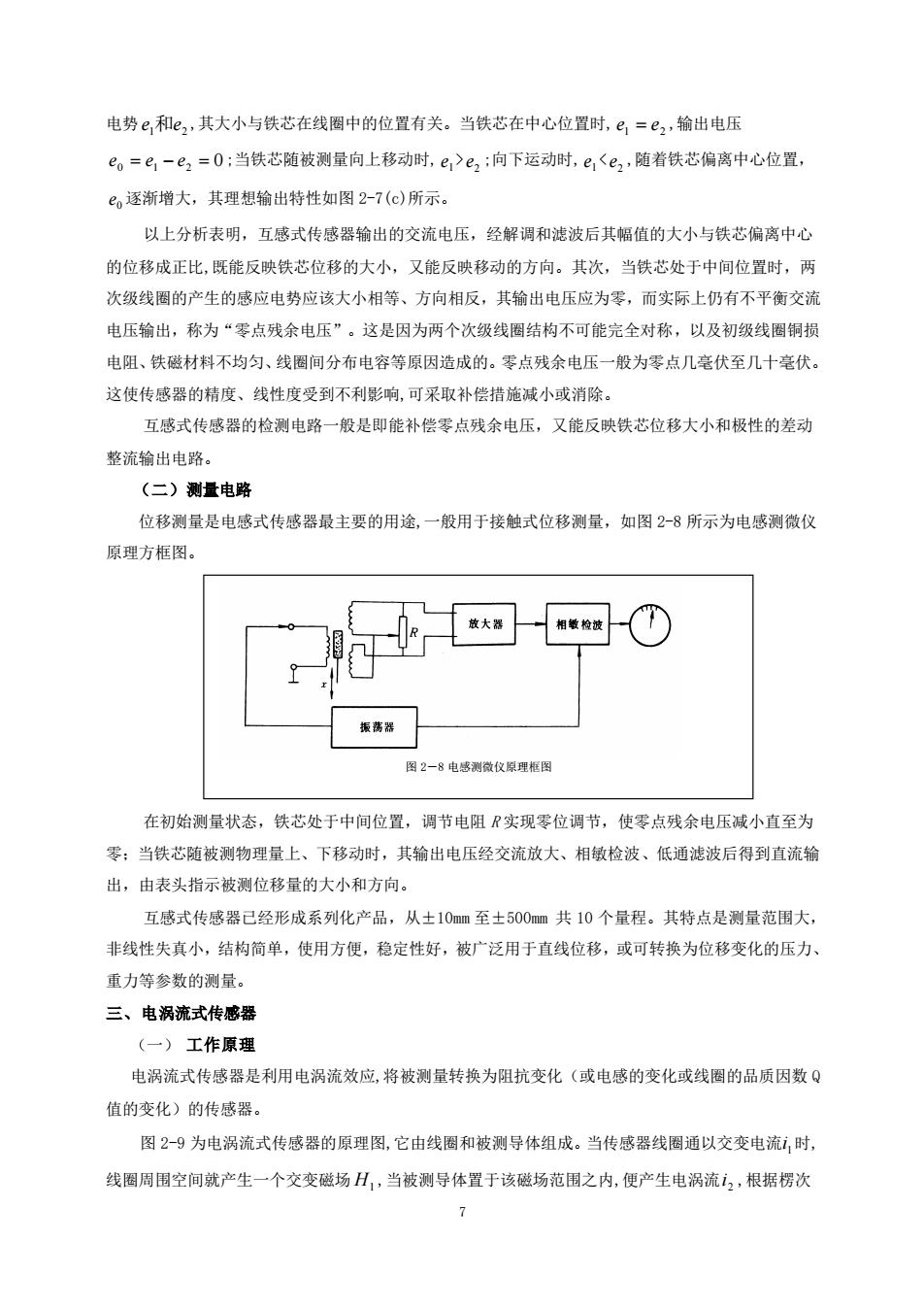
电势e,和e,,其大小与铁芯在线圈中的位置有关。当铁芯在中心位置时,e,=e,输出电压e=e,-e=0:当铁芯随被测量向上移动时,e>e :向下运动时,eie,,随着铁芯偏离中心位置,e.逐渐增大,其理想输出特性如图2-7(c)所示。以上分析表明,互感式传感器输出的交流电压,经解调和滤波后其幅值的大小与铁芯偏离中心的位移成正比,既能反映铁芯位移的大小,又能反映移动的方向。其次,当铁芯处于中间位置时,两次级线圈的产生的感应电势应该大小相等、方向相反,其输出电压应为零,而实际上仍有不平衡交流电压输出,称为“零点残余电压”。这是因为两个次级线圈结构不可能完全对称,以及初级线圈铜损电阻、铁磁材料不均匀、线圈间分布电容等原因造成的。零点残余电压一般为零点几毫伏至几十毫伏这使传感器的精度、线性度受到不利影响,可采取补偿措施减小或消除互感式传感器的检测电路一般是即能补偿零点残余电压,又能反映铁芯位移大小和极性的差动整流输出电路。(二)测量电路位移测量是电感式传感器最主要的用途,一般用于接触式位移测量,如图2-8所示为电感测微仪原理方框图相敏检液T放大器测微仪原理框图在初始测量状态,铁芯处于中间位置,调节电阻R实现零位调节,使零点残余电压减小直至为零;当铁芯随被测物理量上、下移动时,其输出电压经交流放大、相敏检波、低通滤波后得到直流输出,由表头指示被测位移量的大小和方向。互感式传感器已经形成系列化产品,从±10mm至土500mm共10个量程。其特点是测量范围大,非线性失真小,结构简单,使用方便,稳定性好,被广泛用于直线位移,或可转换为位移变化的压力重力等参数的测量。三、电涡流式传感器(一)工作原理电涡流式传感器是利用电涡流效应,将被测量转换为阻抗变化(或电感的变化或线圈的品质因数Q值的变化)的传感器图2-9为电涡流式传感器的原理图,它由线圈和被测导体组成。当传感器线圈通以交变电流时,线圈周围空间就产生一个交变磁场H,当被测导体置于该磁场范围之内,便产生电涡流i2,根据楞次
7 电势 1 2 e 和e ,其大小与铁芯在线圈中的位置有关。当铁芯在中心位置时, 1 2 e = e ,输出电压 e0 = e1 − e2 = 0 ;当铁芯随被测量向上移动时, 1 e > 2 e ;向下运动时, 1 e < 2 e ,随着铁芯偏离中心位置, 0 e 逐渐增大,其理想输出特性如图 2-7(c)所示。 以上分析表明,互感式传感器输出的交流电压,经解调和滤波后其幅值的大小与铁芯偏离中心 的位移成正比,既能反映铁芯位移的大小,又能反映移动的方向。其次,当铁芯处于中间位置时,两 次级线圈的产生的感应电势应该大小相等、方向相反,其输出电压应为零,而实际上仍有不平衡交流 电压输出,称为“零点残余电压”。这是因为两个次级线圈结构不可能完全对称,以及初级线圈铜损 电阻、铁磁材料不均匀、线圈间分布电容等原因造成的。零点残余电压一般为零点几毫伏至几十毫伏。 这使传感器的精度、线性度受到不利影响,可采取补偿措施减小或消除。 互感式传感器的检测电路一般是即能补偿零点残余电压,又能反映铁芯位移大小和极性的差动 整流输出电路。 (二)测量电路 位移测量是电感式传感器最主要的用途,一般用于接触式位移测量,如图 2-8 所示为电感测微仪 原理方框图。 在初始测量状态,铁芯处于中间位置,调节电阻 R 实现零位调节,使零点残余电压减小直至为 零;当铁芯随被测物理量上、下移动时,其输出电压经交流放大、相敏检波、低通滤波后得到直流输 出,由表头指示被测位移量的大小和方向。 互感式传感器已经形成系列化产品,从±10mm 至±500mm 共 10 个量程。其特点是测量范围大, 非线性失真小,结构简单,使用方便,稳定性好,被广泛用于直线位移,或可转换为位移变化的压力、 重力等参数的测量。 三、电涡流式传感器 (一) 工作原理 电涡流式传感器是利用电涡流效应,将被测量转换为阻抗变化(或电感的变化或线圈的品质因数 Q 值的变化)的传感器。 图 2-9 为电涡流式传感器的原理图,它由线圈和被测导体组成。当传感器线圈通以交变电流 1 i 时, 线圈周围空间就产生一个交变磁场 H1 ,当被测导体置于该磁场范围之内,便产生电涡流 2 i ,根据楞次 图 2-8 电感测微仪原理框图
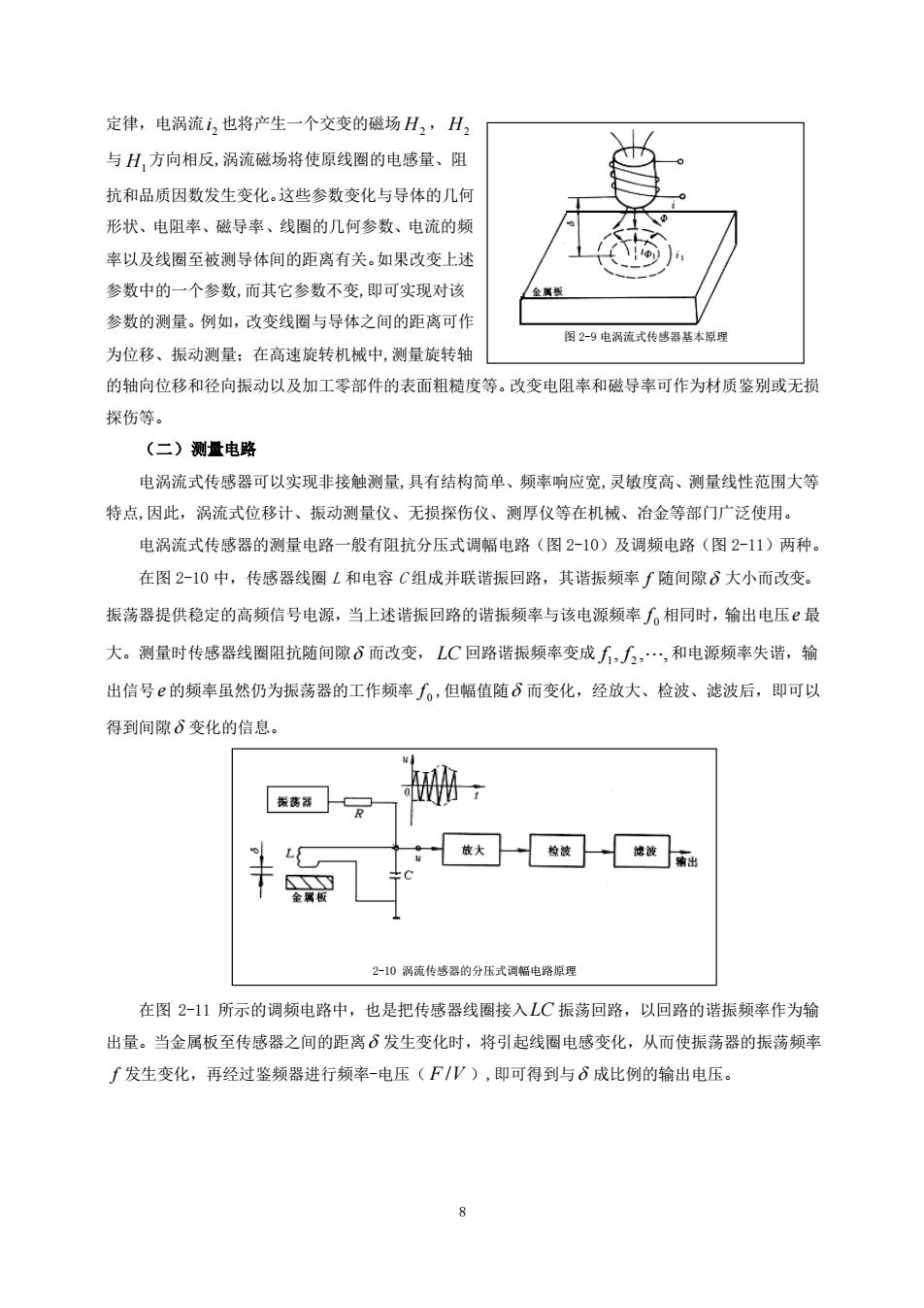
定律,电涡流i,也将产生一个交变的磁场H,,H与H,方向相反,涡流磁场将使原线圈的电感量、抗和品质因数发生变化。这些参数变化与导体的几何形状、电阻率、磁导率、线圈的几何参数、电流的频率以及线圈至被测导体间的距离有关。如果改变上述参数中的一个参数,而其它参数不变,即可实现对该参数的测量。例如,改变线圈与导体之间的距离可作图2-9电涡流式传感器基为位移、振动测量;在高速旋转机械中,测量旋转轴的轴向位移和径向振动以及加工零部件的表面粗糙度等。改变电阻率和磁导率可作为材质鉴别或无损探伤等。(二)测量电路电涡流式传感器可以实现非接触测量,具有结构简单、频率响应宽,灵敏度高、测量线性范围大等特点,因此,涡流式位移计、振动测量仪、无损探伤仪、测厚仪等在机械、治金等部门广泛使用电涡流式传感器的测量电路一般有阻抗分压式调幅电路(图2-10)及调频电路(图2-11)两种在图2-10中,传感器线圈L和电容C组成并联谐振回路,其谐振频率随间隙8大小而改变。振荡器提供稳定的高频信号电源,当上述谐振回路的谐振频率与该电源频率。相同时,输出电压e最大。测量时传感器线圈阻抗随间隙8而改变,LC回路谐振频率变成f,f2,,和电源频率失谐,输出信号e的频率虽然仍为振荡器的工作频率。,但幅值随8而变化,经放大、检波、滤波后,即可以得到间隙8变化的信息。一炭菇器做大#L+丰2-10涡流传感器的分压式调幅电路原理在图2-11所示的调频电路中,也是把传感器线圈接入LC振荡回路,以回路的谐振频率作为输出量。当金属板至传感器之间的距离8发生变化时,将引起线圈电感变化,从而使振荡器的振荡频率f发生变化,再经过鉴频器进行频率-电压(F/V),即可得到与成比例的输出电压
8 定律,电涡流 2 i 也将产生一个交变的磁场 H2 , H2 与 H1 方向相反,涡流磁场将使原线圈的电感量、阻 抗和品质因数发生变化。这些参数变化与导体的几何 形状、电阻率、磁导率、线圈的几何参数、电流的频 率以及线圈至被测导体间的距离有关。如果改变上述 参数中的一个参数,而其它参数不变,即可实现对该 参数的测量。例如,改变线圈与导体之间的距离可作 为位移、振动测量;在高速旋转机械中,测量旋转轴 的轴向位移和径向振动以及加工零部件的表面粗糙度等。改变电阻率和磁导率可作为材质鉴别或无损 探伤等。 (二)测量电路 电涡流式传感器可以实现非接触测量,具有结构简单、频率响应宽,灵敏度高、测量线性范围大等 特点,因此,涡流式位移计、振动测量仪、无损探伤仪、测厚仪等在机械、冶金等部门广泛使用。 电涡流式传感器的测量电路一般有阻抗分压式调幅电路(图 2-10)及调频电路(图 2-11)两种。 在图 2-10 中,传感器线圈 L 和电容 C 组成并联谐振回路,其谐振频率 f 随间隙 大小而改变。 振荡器提供稳定的高频信号电源,当上述谐振回路的谐振频率与该电源频率 0 f 相同时,输出电压 e 最 大。测量时传感器线圈阻抗随间隙 而改变, LC 回路谐振频率变成 , , , f 1 f 2 和电源频率失谐,输 出信号 e 的频率虽然仍为振荡器的工作频率 0 f ,但幅值随 而变化,经放大、检波、滤波后,即可以 得到间隙 变化的信息。 在图 2-11 所示的调频电路中,也是把传感器线圈接入 LC 振荡回路,以回路的谐振频率作为输 出量。当金属板至传感器之间的距离 发生变化时,将引起线圈电感变化,从而使振荡器的振荡频率 f 发生变化,再经过鉴频器进行频率-电压( F /V ),即可得到与 成比例的输出电压。 2-10 涡流传感器的分压式调幅电路原理 图 2-9 电涡流式传感器基本原理
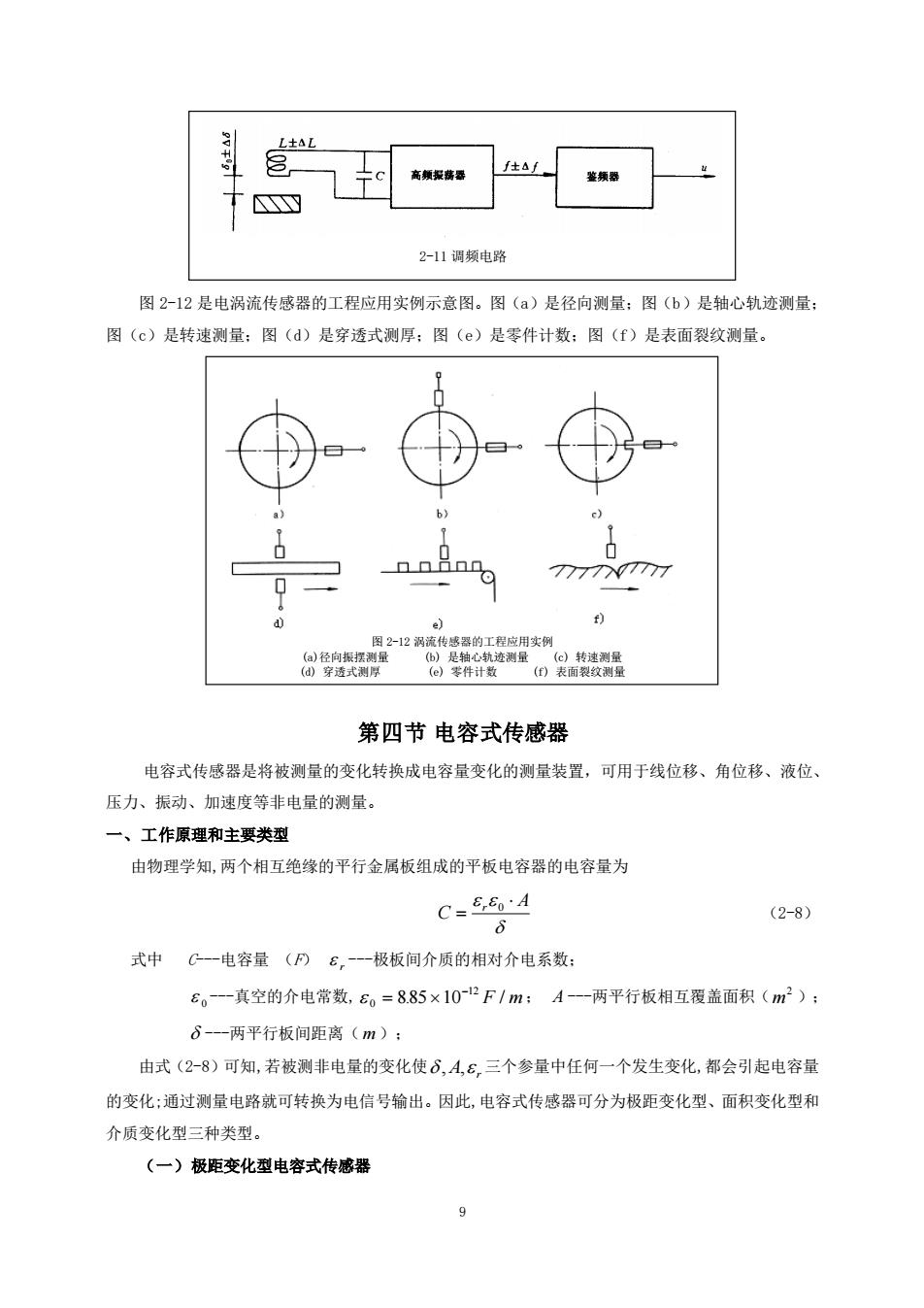
高频报病导2-11 调频电路图2-12是电涡流传感器的工程应用实例示意图。图(a)是径向测量;图(b)是轴心轨迹测量;图(c)是转速测量:图(d)是穿透式测厚:图(e)是零件计数:图(f)是表面裂纹测量(a)径向转速测量(6)是辅心第四节电容式传感器电容式传感器是将被测量的变化转换成电容量变化的测量装置,可用于线位移、角位移、液位压力、振动、加速度等非电量的测量。一、工作原理和主要类型由物理学知,两个相互绝缘的平行金属板组成的平板电容器的电容量为C-SE-4(2-8)式中C--电容量(F)8,---极板间介质的相对介电系数:8。--真空的介电常数,60=8.85×10-12F/m;A---两平行板相互覆盖面积(m2);8---两平行板间距离(m):由式(2-8)可知,若被测非电量的变化使8,A,s,三个参量中任何一个发生变化,都会引起电容量的变化:通过测量电路就可转换为电信号输出。因此,电容式传感器可分为极距变化型、面积变化型和介质变化型三种类型。(一)极距变化型电容式传感器
9 图 2-12 是电涡流传感器的工程应用实例示意图。图(a)是径向测量;图(b)是轴心轨迹测量; 图(c)是转速测量;图(d)是穿透式测厚;图(e)是零件计数;图(f)是表面裂纹测量。 第四节 电容式传感器 电容式传感器是将被测量的变化转换成电容量变化的测量装置,可用于线位移、角位移、液位、 压力、振动、加速度等非电量的测量。 一、工作原理和主要类型 由物理学知,两个相互绝缘的平行金属板组成的平板电容器的电容量为 A C r = 0 (2-8) 式中 C-电容量 (F) r -极板间介质的相对介电系数; 0 -真空的介电常数, 0 12 = 88510− . F / m ; A -两平行板相互覆盖面积( m 2 ); -两平行板间距离( m ); 由式(2-8)可知,若被测非电量的变化使 A r , , 三个参量中任何一个发生变化,都会引起电容量 的变化;通过测量电路就可转换为电信号输出。因此,电容式传感器可分为极距变化型、面积变化型和 介质变化型三种类型。 (一)极距变化型电容式传感器 2-11 调频电路 图 2-12 涡流传感器的工程应用实例 (a)径向振摆测量 (b) 是轴心轨迹测量 (c) 转速测量 (d) 穿透式测厚 (e) 零件计数 (f) 表面裂纹测量
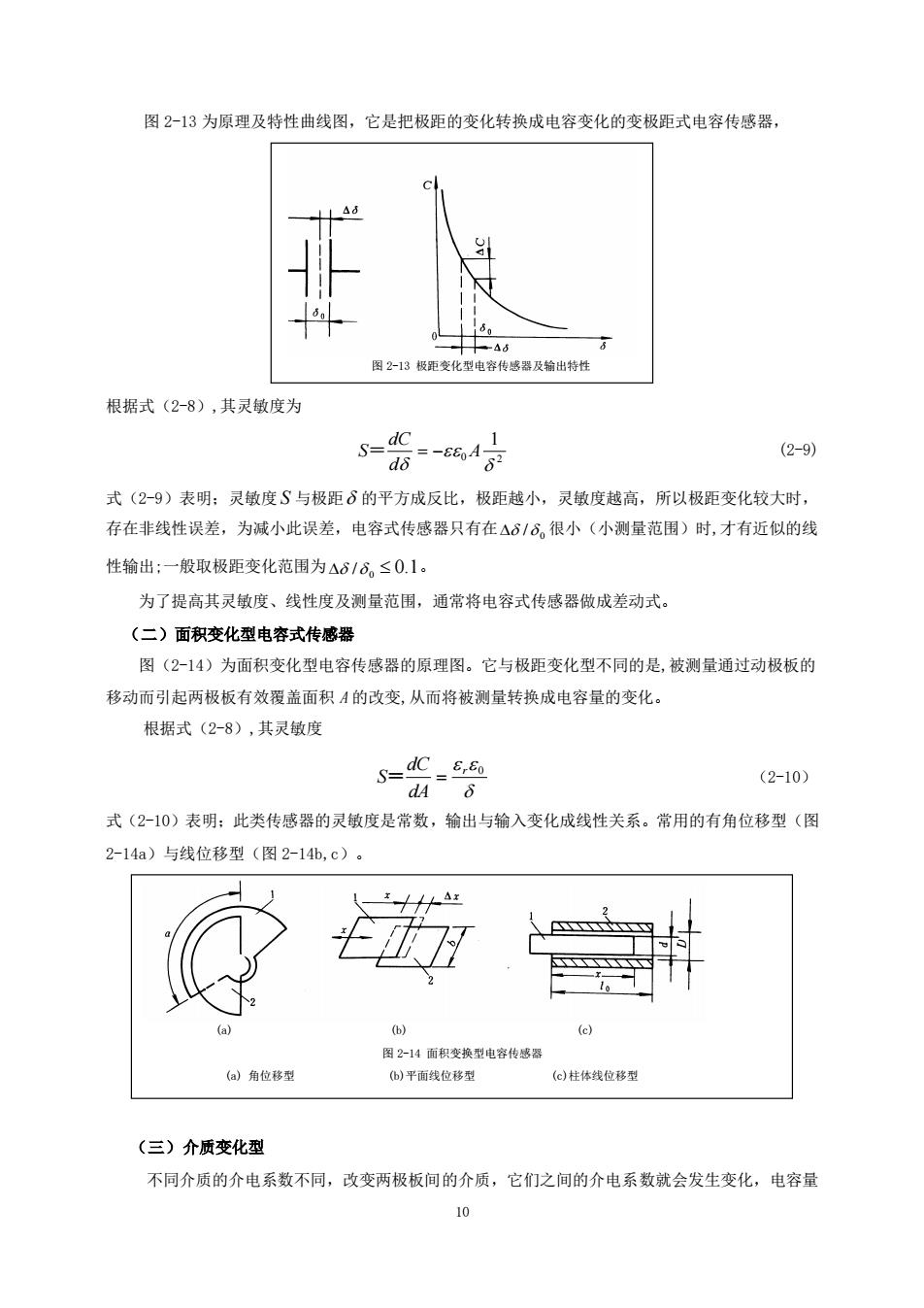
图2-13为原理及特性曲线图,它是把极距的变化转换成电容变化的变极距式电容传感器,图2-13极距变化型电容传感器及输出特性根据式(2-8),其灵敏度为dcS=(2-9)-60A式(2-9)表明:灵敏度S与极距S的平方成反比,极距越小,灵敏度越高,所以极距变化较大时存在非线性误差,为减小此误差,电容式传感器只有在△8/8.很小(小测量范围)时,才有近似的线性输出:一般取极距变化范围为^6/8≤0.1。为了提高其灵敏度、线性度及测量范围,通常将电容式传感器做成差动式。(二)面积变化型电容式传感器图(2-14)为面积变化型电容传感器的原理图。它与极距变化型不同的是,被测量通过动极板的移动而引起两极板有效覆盖面积A的改变,从而将被测量转换成电容量的变化。根据式(2-8),其灵敏度dc_6,6(2-10)JA式(2-10)表明;此类传感器的灵敏度是常数,输出与输入变化成线性关系。常用的有角位移型(图2-14a)与线位移型(图2-14b,c)图2-14面积变换型电容传感器(a)角位移型(c)柱体线位移型(b)平面线位移型(三)介质变化型不同介质的介电系数不同,改变两极板间的介质,它们之间的介电系数就会发生变化,电容量
10 图 2-13 为原理及特性曲线图,它是把极距的变化转换成电容变化的变极距式电容传感器, 根据式(2-8),其灵敏度为 0 2 1 A d dC S= = − (2-9) 式(2-9)表明;灵敏度 S 与极距 的平方成反比,极距越小,灵敏度越高,所以极距变化较大时, 存在非线性误差,为减小此误差,电容式传感器只有在 0 / 很小(小测量范围)时,才有近似的线 性输出;一般取极距变化范围为 0 / 0.1。 为了提高其灵敏度、线性度及测量范围,通常将电容式传感器做成差动式。 (二)面积变化型电容式传感器 图(2-14)为面积变化型电容传感器的原理图。它与极距变化型不同的是,被测量通过动极板的 移动而引起两极板有效覆盖面积 A 的改变,从而将被测量转换成电容量的变化。 根据式(2-8),其灵敏度 r 0 dA dC S= = (2-10) 式(2-10)表明;此类传感器的灵敏度是常数,输出与输入变化成线性关系。常用的有角位移型(图 2-14a)与线位移型(图 2-14b,c)。 (三)介质变化型 不同介质的介电系数不同,改变两极板间的介质,它们之间的介电系数就会发生变化,电容量 图 2-13 极距变化型电容传感器及输出特性 (a) (b) (c) 图 2-14 面积变换型电容传感器 (a) 角位移型 (b)平面线位移型 (c)柱体线位移型