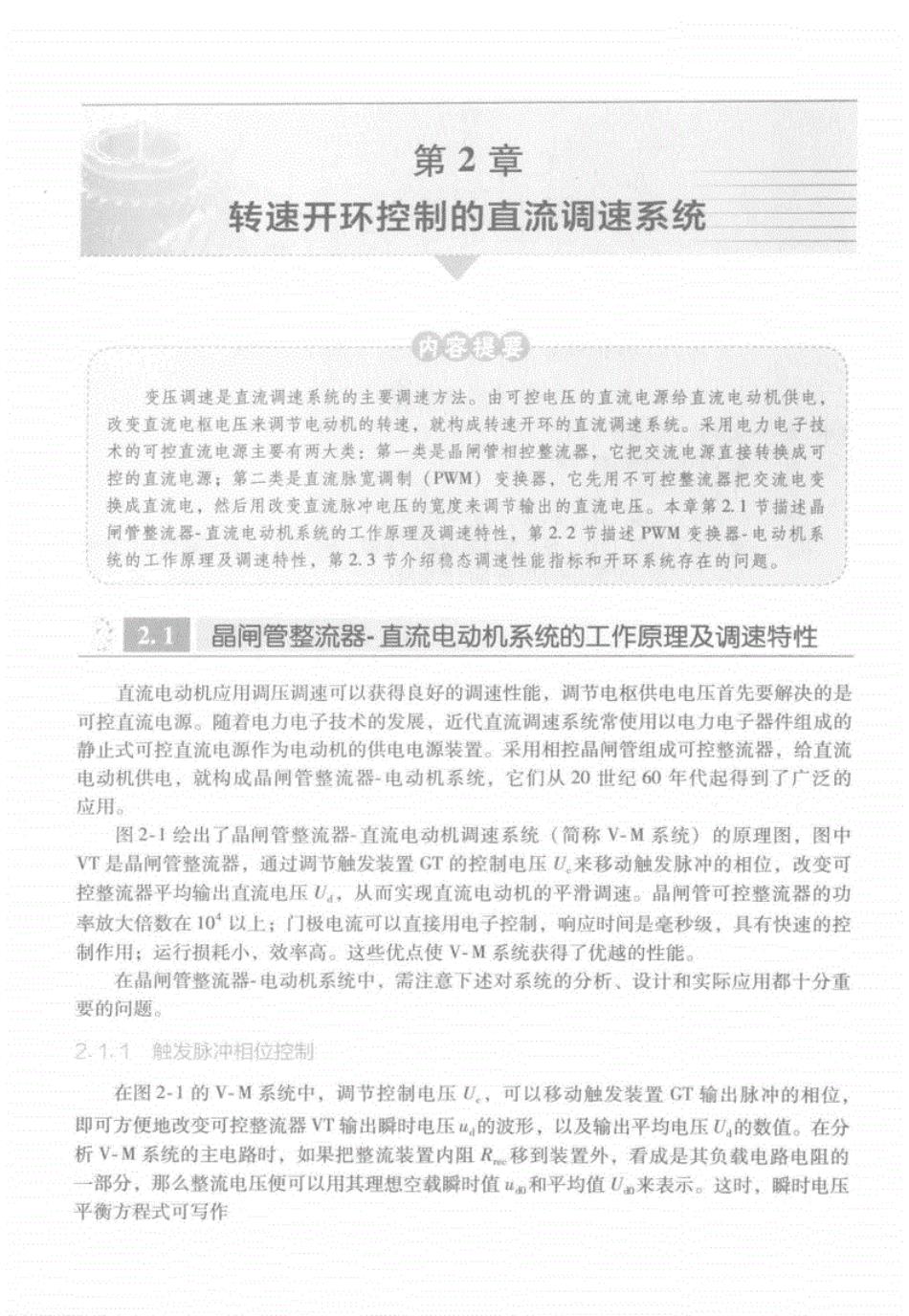
第2章 转速开环控制的直流调速系统 内容提要 变压调速是直流调速系统的主要调速方法。由可控电压的直流电源给直流电动机供电 改变直流电框电压来调节电动机的转速,就构成转速开环的直流调速系统。采用电力电子技 术的可控直流电源主要有两大类:第一类是晶闸管相控整流器,它把交流电源直接转换成可 控的直流电源:第二类是直流脉宽调制(PWM)变换器,它先用不可控整流器把交流电变 换成直流电,味后用改专直湾成冲由压的宽形来调节给出的直清由压太意第2】若监课是 闸管整流器-直流电动机系统的工作原理及调速特性,第2.2节描述PWM变换器电动机系 统的工作原理及调速特性,第23节介绍稳态调速性能指标和开环系统存在的问题。 2.1晶闸管整流器·直流电动机系统的工作原理及调速特性 直流电动机应用调压调速可以获得良好的调速性能,调节电枢供电电压首先要解决的是 可控直流电源。随着电力电子技术的发展,近代直流调速系统常使用以电力电子器件组成的 静止式可控直流电源作为电动机的供电电源装置。采用相控晶闸管组成可控整流器,给直流 电动机供电,就构成晶闸管整流器电动机系统,它们从20世纪60年代起得到了广泛的 应用。 图21绘出了晶闸管整流器-直流电动机调速系统(简称V-M系统)的原理图,图中 VT是晶闸管整流器,通过调节触发装置GT的控制电压U来移动触发脉冲的相位,改变可 控整流器平均输出直流电压U。,从而实现直流电动机的平滑调速。晶闸管可控整流器的功 率放大倍数在10以上;门极电流可以直接用电子控制,响应时间是毫秒级,具有快速的控 制作用:运行损耗小,效率高。这些优点使VM系统获得了优越的性能。 在晶闸管整流器电动机系统中,需注意下述对系统的分析、设计和实际应用都十分重 要的问题。 2.1.1触发脉冲相位控制 在图21的V-M系统中,调节控制电压U,可以移动触发装置GT输出脉冲的相位, 即可方便地改变可控整流器VT输出瞬时电压“,的波形,以及输出平均电压U,的数值。在分 析VM系统的主电路时,如果把整流装置内阻R移到装置外,看成是其负载电路电阻的 一部分,那么整流电压便可以用其理想空载瞬时值和平均值U。来表示。这时,瞬时电压 平衡方程式可写作
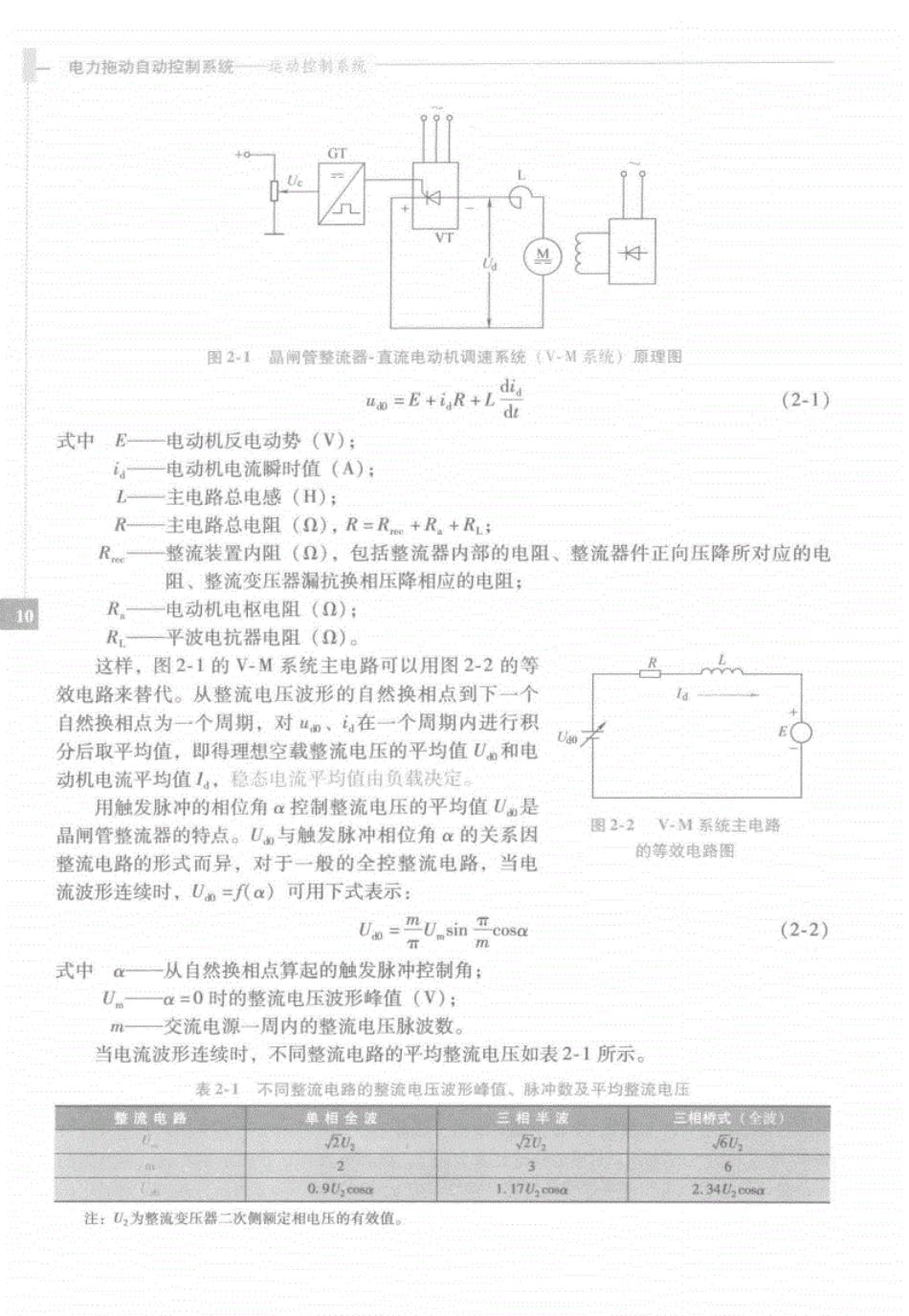
一电力拖动自动控制系统—一动位制系玩 图21晶闸管整流器·直流电动机调速系统YM系统)原理图 =E+iR+儿出 (2-1) 式中E 电动机反电动势(V): 电动机电流瞬时值(A): 一主电路总电感(H): R—主电路总电阻(D),R=R+R。+RL; R 整流装置内阳(),包括整流器内部的电阻、整流器件正向压降所对应的电 阻、整流变压器漏抗换相压降相应的电阻; 10 R 电动机电枢电阻(): R。 一平波电抗器电阻()。 这样,图21的VM系统主电路可以用图2-2的等 效电路来替代。从整流电压波形的自然换相点到下一个 自然换相点为一个周期,对“。、在一个周期内进行积 分后取平均值,即得理想空载整流电压的平均值U。和电 动机电流平均值,稳态电流平均值由负载决定 用触发脉冲的相位角α控制整流电压的平均值U,是 晶闸管整流器的特点。U,与触发脉冲相位角α的关系因 图22VM系统主电端 整流电路的形式而异,对于一般的全控整流电路,当电 的等效电路围 流波形连续时,U。=f孔a)可用下式表示: (2-2) 式中:一从自然换相点算起的触发脉冲控制角: -a=0时的整流电压波形峰值(V): m一交流电源一周内的整流电压球波数 当电流波形连续时,不同整流电路的平均整流电压如表2~1所示。 表21不同整流电路的整流电压波形蜂值、脉冲数及平均整流电压 整流电路 单相全波 三报半波 17 2.34,a 注:私为整流变压器二次侧额定相电压的有效值
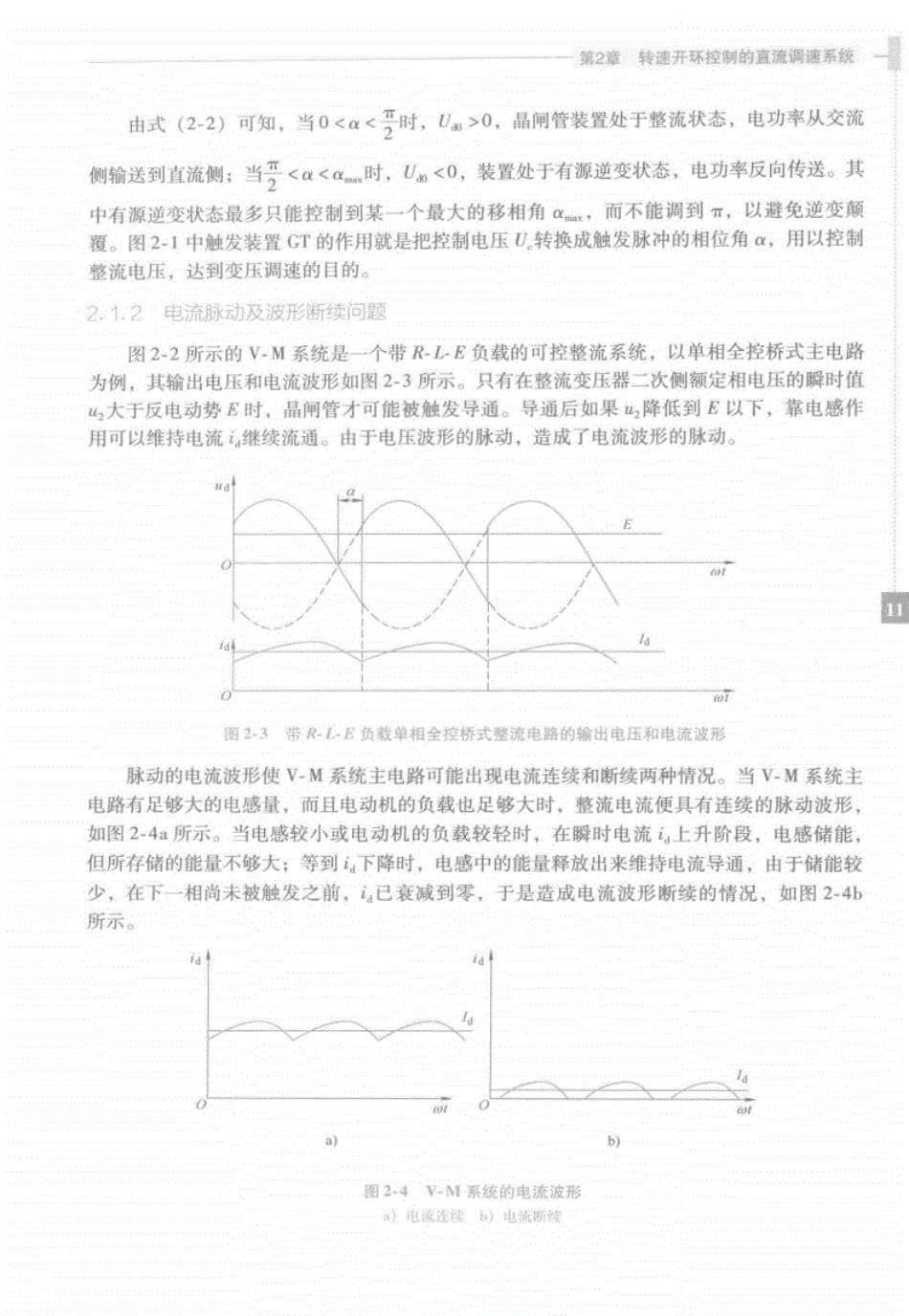
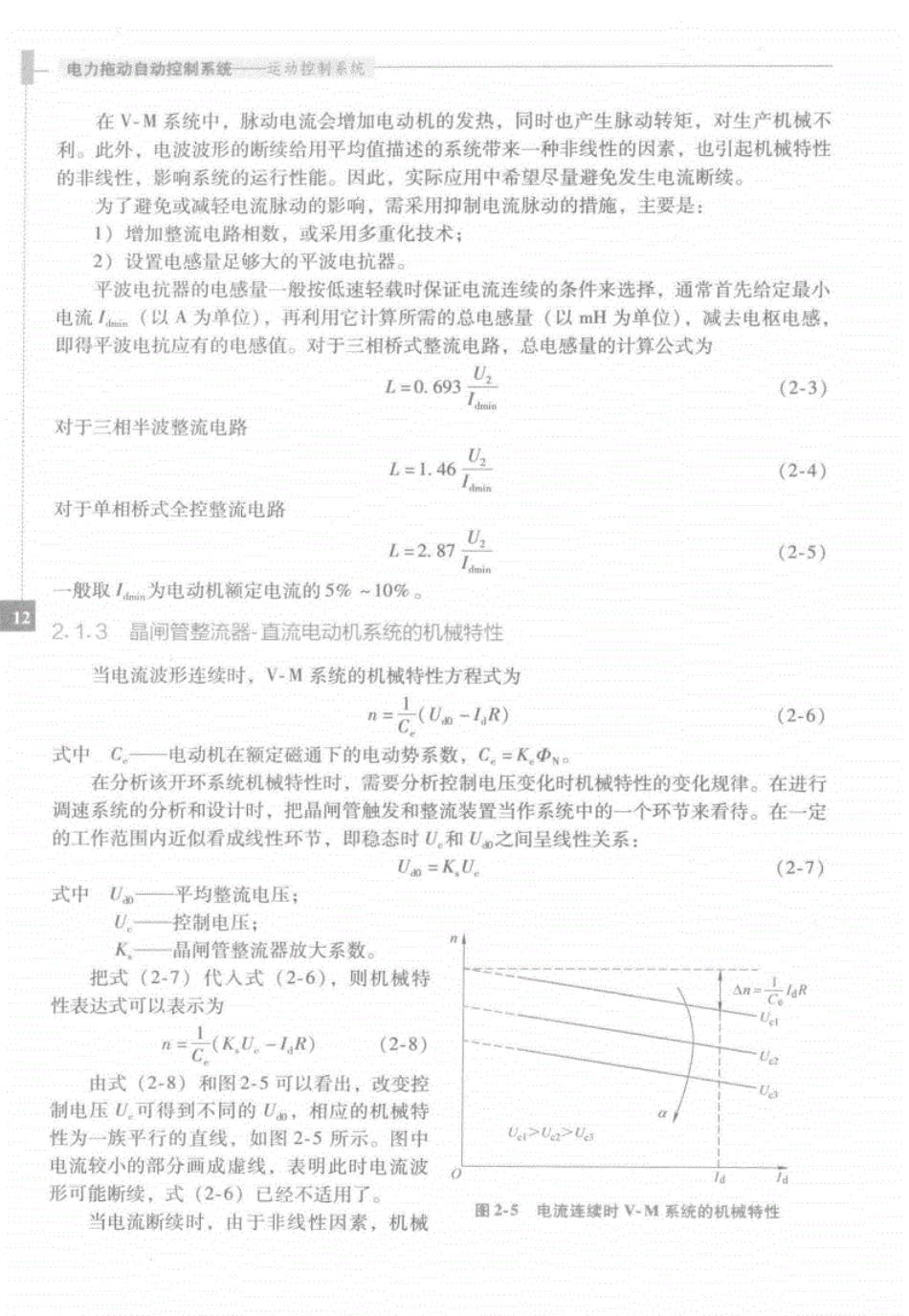
第2章转速开环控制的直流调速系统 由式(2-2)可知,当0<a<云时,U。>0,晶闸管装置处于整流状态,电功率从交流 侧输送到直流侧:当牙<a<a时,U。<0,装置处于有源逆变状态,电功率反向传送。其 中有源逆变状态最多只能控制到某一个最大的移相角α,而不能调到T,以避免逆变颠 覆。图2-1中触发装置GT的作用就是把控制电压U转换成触发脉冲的相位角α,用以控制 整流电压,达到变压调速的目的。 2.1.2电流脉动及波形断续问题 图22所示的VM系统是一个带RLE负载的可控整流系统,以单相全控桥式主电路 为例,其输出电压和电流波形如图2-3所示。只有在整流变压器二次侧额定相电压的瞬时值 山,大于反电动势E时,晶闸管才可能被触发导通。导通后如果,降低到E以下,靠电感作 用可以维持电流,继续流通。由于电压波形的脉动,造成了电流波形的脉动。 图23带RE负载单相全控桥式整流电路的输出电压和电流波形 脉动的电流波形使V-M系统主电路可能出现电流连续和断续两种情况。当VM系统主 电路有足够大的电感量,而且电动机的负载也足够大时,整流电流便具有连续的脉动波形, 如图2~4红所示。当电感较小或电动机的负载较轻时,在瞬时电流4上升阶段,电感储能 但所存储的能量不够大:等到4下降时,电感中的能量释放出来维持电流导通,由于储能较 少,在下一相尚未被触发之前,已衰减到零,于是造成电流波形断续的情况,如图2-4b 所示。 阳2-4V-M系统的电流波形 )电流连婆】电减断建
【电力拖动自功控制系统—一英动控制系纯 在V-M系统中,脉动电流会增加电动机的发热,同时也产生脉动转矩,对生产机械不 利。此外,电波波形的断续给用平均值描述的系统带来一种非线性的因素,也引起机械特性 的非线性,影响系统的运行性能。因此,实际应用中希望尽量避免发生电流断续。 为了避免或减轻电流脉动的影响,需采用抑制电流脉动的措施,主要是: 1)增加整流电路相数,或采用多重化技术: 2)设置电感量足够大的平波电抗器。 平波电抗器的电感量一般按低速轻载时保证电流连续的条件来选择,通常首先给定最小 电流/(以A为单位),再利用它计算所需的总电感量(以mH为单位),减去电枢电感 即得平波电抗应有的电感值。对于三相桥式整流电路,总电感量的计算公式为 1=0.6934 (2-3) 对于三相半波整流电路 L=1462 (2-4) 对于单相桥式全控整流电路 (2-5) 一般取1为电动机额定电流的5%~10%。 12 2.1.3晶闸管整流器·直流电动机系统的机械特性 当电流波形连续时,V-M系统的机械特性方程式为 n=c(U-1R) (2-6 式中G 电动机在额定磁通下的电动势系数,C。=K中、 在分析该开环系统机械特性时,需要分析控制电压变化时机械特性的变化规律。在进行 调速系统的分析和设计时,把晶闸管触发和整流装置当作系统中的一个环节来看待。在一定 的工作范围内近似看成线性环节,即稳态时U,和U。之间呈线性关系: Ux=K.U. (2-7) 式中U。一平均整流电压」 U- 控制电压 K一晶闸管整流器放大系数。 把式(2-7)代入式(2-6),则机械特 性表达式可以表示为 n=T(K.U.-IR) (2-8】 由式(2-8)和图25可以看出,改变控 制电压U可得到不同的U。,相应的机械特 性为一族平行的直线,如图25所示。图中 e>a>0 电流较小的部分画成虚线,表明此时电流波 形可能断续,式(2-6)已经不适用了。 当电流断续时,由于非线性因素,机械 图25电流连续时VM系统的机械特性
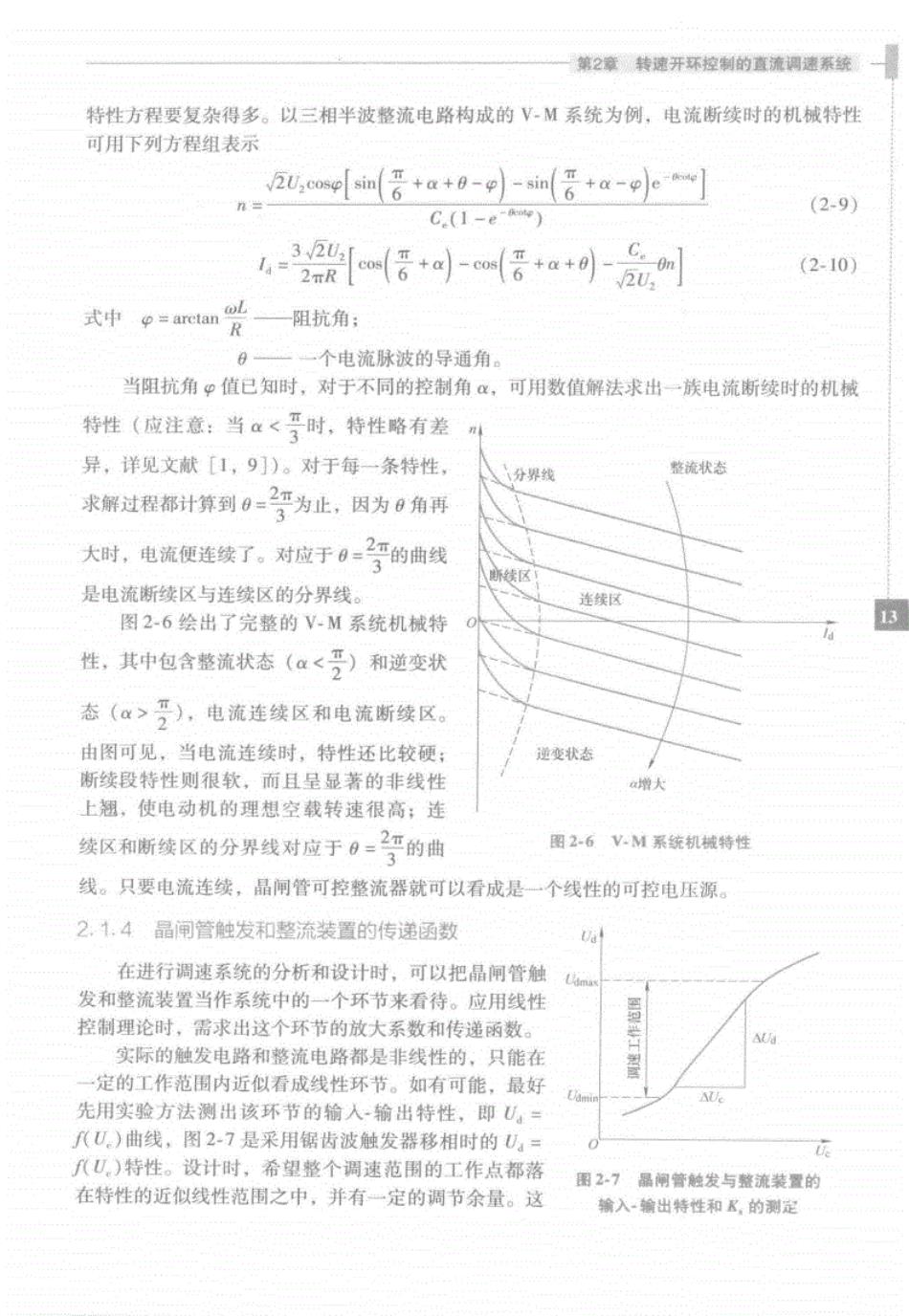
第2章转速开环控制的直流调速系统 特性方程要复杂得多。以三相半波整流电路构成的VM系统为例,电流断续时的机械特性 可用下列方程组表示 ZU;cosp[sina+0-sina-oe n= C.(1-e) (2-9) (2-10) 式中=amam一阻抗角: 一个电流脉波的导通角 当阻抗角值已知时,对于不同的控制角α,可用数值解法求出一族电流断续时的机械 特性(应注意:当a<牙时,特性略有差 异,详见文献[1,9])。对于每一条特性, 分界找 整流状想 求解过程都计算到0=三为止,因为8角再 大时,电流便连续了。对应于0=的曲线 区 是电流断续区与连续区的分界线。 、连线区 图26绘出了完整的V-M系统机械特 性,其中包含整流状态(a<)和逆变状 态(α>牙),电流连续区和电流断续区。 由图可见,当电流连续时,特性还比较硬 逆变状态 断续段特性则很软,而且呈显著的非线性 a增大 上翘,使电动机的理想空载转速很高:连 续区和断续区的分界线对应于日=的曲 图26VM系统机械特性 线。只要电流连续,晶闸管可控整流器就可以看成是一个线性的可控电压源。 2,1,4晶闸管触发和整流装置的传递函数 a 在进行调速系统的分析和设计时,可以把晶闸管触 发和整流装置当作系统中的一个环节来看待。应用线性 控制理论时,需求出这个环节的放大系数和传递函数。 实际的触发电路和整流电路都是非线性的,只能在 定的工作范围内近似看成线性环节。如有可能,最好 先用实验方法测出该环节的输人-输出特性,即U,= 八U。)曲线,图2-7是采用锯齿波触发器移相时的U, (U,)特性。设计时,希望整个调速范围的工作点都落 图27晶闸管触发与整流装置的 在特性的近似线性范围之中,并有一定的调节余量。这 输入输出特性和X,的测定