电力施动自功控制系统—功控制系镜 高性能的运动控制系统需要转速闭环控制,但速度传感器的机械安装要求高,调试工作 量大,有时由于场地及空间的限制,根本不允许安装速度传感器,无速度传感器控制的调速 系统正能弥补这些不足。无速度传感器控制的基本方法是实时检测定子电压和电流,再依据 电动机模型或合适的算法对转速进行估算,用估算的值进行反馈控制)。但这种方法受 电动机参数影响大,对测量噪声敏感。如何提高转速估算精度,是进一步发展无速度传感器 控制系统的关键问题。 近年来,模糊控制、专家系统和神经网络的应用,使运动控制系统向智能化的方向发 展。在现代运动控制系统中,常使智能控制与传统P控制互相结合,取长补短,既保证 了系统的控制精度,又增加了系统的自学习、自调整及决策能力,提高了系统的鲁棒性。 》1.3运动控制系统的转矩控制规律 运动控制系统的基本运动方程式 )-T.-T-Do-K0 d d 2= (1-1 式中J一机械转动惯量(kg·m): W 转子的机械角速度(rad/s): 转子的机械转角(rad): 电磁转矩(N·m): T 负载转矩(N·m): D 阻转矩阻尼系数: K一扭转弹性转矩系数」 当为常数时,式(11)可写成 =-.-a d0. =0 (1-2) 若忽略阻尼转矩和扭转弹性转矩,则运动控制系统的基本运动方程式可简化为 (1-3) 若采用工程单位制,则式(13)的第1行应改写为 (1-4) 式中GD2一转动惯量,习惯称飞轮力矩(N·m),GD=4g: 。一转子的机族转连(/)。n空岩 运动控制系统的任务就是控制电动机的转速和转角,对于直线电动机来说是控制速度和
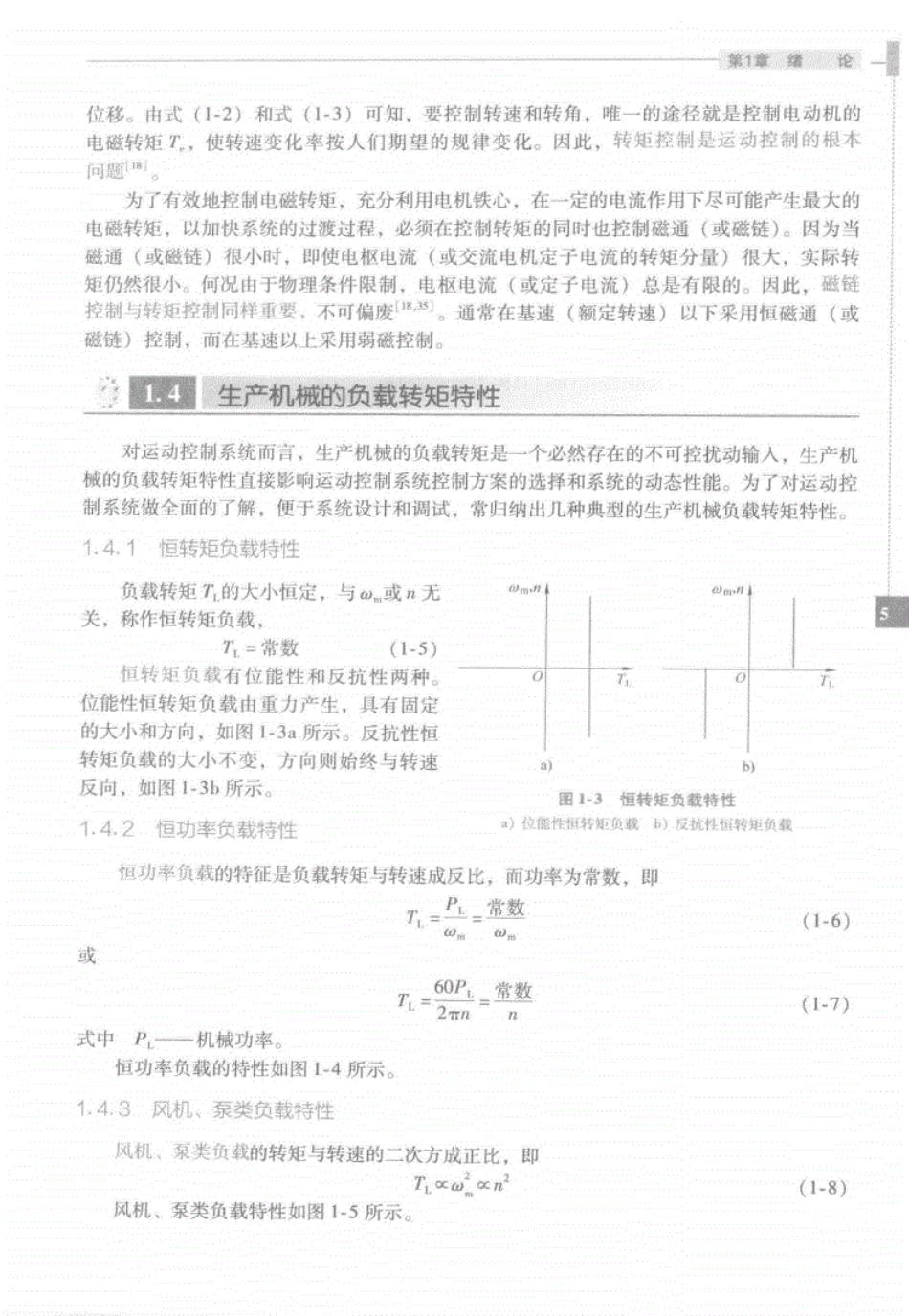
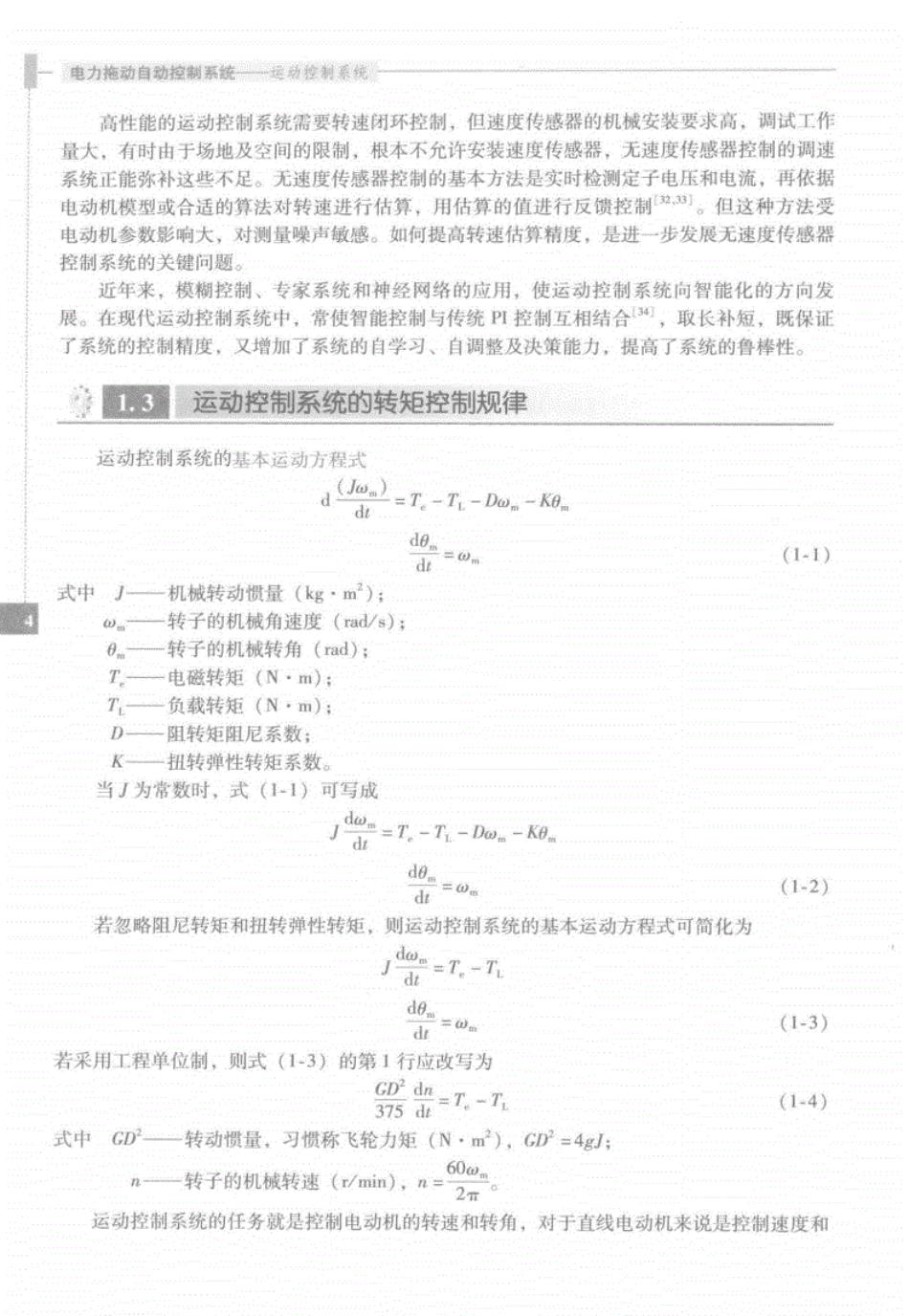
位移。由式(1-2)和式(1-3)可知,要控制转速和转角,唯一的途径就是控制电动机的 电磁转矩T,使转速变化率按人们期望的规律变化。因此,转矩控制是运动控制的根本 问题 为了有效地控制电磁转矩,充分利用电机铁心,在一定的电流作用下尽可能产生最大的 电磁转矩,以加快系统的过渡过程,必须在控制转矩的同时也控制磁通(或磁链)。因为当 磁通(或磁链)很小时,即使电枢电流(或交流电机定子电流的转矩分量)很大,实际转 物个侣杀精队电电喜千电名有食州。健 。通常在基速(额定转速)以下采用恒磁通(或 磁链)控制,而在基速以上采用弱磁控制。 修14生产机械的负载转矩特性 对运动控制系统而言,生产机械的负载转矩是一个必然存在的不可控扰动输人,生产机 械的负载转矩特性直接影响运动控制系统控制方案的选择和系统的动态性能。为了对运动控 制系统做全而的了解,便于系统设计和调试,常归纳出几种典型的生产机械负载转矩特性。 1.4,1恒转矩负载特性 负载转矩T的大小恒定,与创或n无 关,称作恒转矩负载 T=常数 (1-5 恒转矩负载有位能性和反抗性两种 位能性恒转矩负载由重力产生,具有固定 的大小和方向,如图13a所示。反抗性恒 转矩负载的大小不变,方向则始终与转速 反向,如图13b所示。 图13恒转矩负数特性 1,4.2恒功率负载特性 )位能性转矩负载b)反抗性转矩负载 恒功率负我的特征是负载转矩与转速成反比,而功率为常数,即 (1-6) 或 1-7) 式中P,一机械功率。 恒功率负载的特性如图1-4所示。 1.4.3风机、泵类负载特性 风机、泵类负载的转矩与转速的二次方成正比,即 Ticcw cn (1-8) 风机、泵类负载特性如图1-5所示
一电力拖动自动控制系—选控制统 图14恒功率负载特性 图15风机、泵类负载特性 以上所述的各类负载是从各种实际负载中概括出来的典型负载形式,实际负载可能是多 个典型负载的组合,应根据实际负载的具体情况加以分析
第 因 闹 直流调速系统 根据生产机械的要求,电力拖动自动控制系统有调速系统、伺服系统、张 力控制系统、多电动机同步控制系统等多种类型、实际上各种系统都是通过控 制电动机的转速来实现的,因此调速系统是电力拖动控制系统中最基本的 系统。 按照所用电动机种类的不同,调速系统可分为直流调速系统和交流调 速系统两类。直流电动机具有良好的控制性能,起动、制动方便,宜于在 宽范围内平滑调速,因此在20世纪70年代以前,许多需要调速和(或) 快速正反向的电力拖动设备都广泛采用直流调速系统。自从电力电子器件 在电力拖动的动力电源中获得应用以后,相继开发出各种交流调速系统。 现在高性能的交流调速技术已经发展成熟,大部分原来采用直流调速系统 的电力拖动设备已被交流调速系统取代。但是,直流调速系统的分析与控 制理论仍是控制规律的基础,许多高性能交流调速技术都是在直流调速理 论的基础上发展起来的,而且有些小容量的直流调速系统现在还在应用, 因此掌握直流调速系统的基本规律和控制方法是非常必要的。本书第篇 首先介绍直流调速系统。 直流电动机的稳态转速可表示为
式中n转速(r/min): 一电枢电压(V): -电枢电流(A) R—电枢回路总电阻(): 励磁磁通(W) -由电机结构决定的电动势常数。 由上式可以看出,有三种调节电动机转速的方法 1)调节电枢供电电压: 2)减弱励磁磁通中: 3)改变由假回路电阳R 对于要求在一定范围内无级平滑调速的系统来说,以调节电 枢供电电压的方式为最好。改变电阻只能有级调速;减弱磁通虽 然能够平滑调速,但调速范围不大,往往只是配合调压方案在基 速(额定转速)以上做小范围的弱磁升速。因此,自动控制的 直流调速系统往往以变压调速为主