
二、系统结构与组成 1.系统的结构 TW-2系统结构设计为操作级(工作站)、控制级 (下层控制器)、管理级(上层管理机)三层集散式控制 系统。如图6-1所示。 控制级与管理级间,以及控制级内各控制器之间采用 了1兆控制局域网(CAN)进行通讯联系; 操作级与管理级间以及各级内之间采用10/100兆以太 局域网络(Ethernet)通信
二、系统结构与组成 1. 系统的结构 TW-2系统结构设计为操作级(工作站)、控制级 (下层控制器)、管理级(上层管理机)三层集散式控制 系统。如图6–1所示。 控制级与管理级间,以及控制级内各控制器之间采用 了1兆控制局域网(CAN)进行通讯联系; 操作级与管理级间以及各级内之间采用10/100兆以太 局域网络(Ethernet)通信

打印机 调车长 调速, 维护 工作出 工作站 打E印机 工作站 膜可显示 保架琴控 MODEM 断 编组站信息 管理系统 网华络集线器 气象站 以太网 上层控制 上层控制 模块 模块 MA B) CAN冈1 CAN网2 m m 二位 三音位 股道 调车进路控制 樱放进路控制 模块(ZB) 战速器控制 战速器控制 空闲长度测是 模快LB) 模块JB) 模块(JB) 模统(CB 玉 继电器接口电略 扬间联系 驼喹信号 测重 转辙机 测长 城速器 光挡 机车遥控 计轴 调车信号 轨道电路 测速 图6-1典型TW-2组态式控制系统结构示意图
图6–1 典型 TW-2组态式控制系统结构示意图
控制级为Intel80386专用嵌入式计算机,操作与管理级 采用工业PC机80486、P2或P3CPU。 管理级采用AMX386实时多任务操作系统;操作级采 用中文版Windows NT Workstation4.0操作系统及多媒体 技术。 按控制功能和范围设定了不同的自动化独立节点,故 障不扩散,最大节点数32个(可扩至1024个)。 操作级最多可接10个工作站,可选择光纤通道使传输 距离大于4000,可与异网互连。管理级微机集中了联网 设备的所有信息,实现集中指挥与管理
控制级为Intel80386专用嵌入式计算机,操作与管理级 采用工业PC机80486、P2或P3 CPU。 管理级采用AMX386实时多任务操作系统;操作级采 用中文版Windows NT Workstation 4.0操作系统及多媒体 技术。 按控制功能和范围设定了不同的自动化独立节点,故 障不扩散,最大节点数32个(可扩至1024个)。 操作级最多可接10个工作站,可选择光纤通道使传输 距离大于4000m,可与异网互连。管理级微机集中了联网 设备的所有信息,实现集中指挥与管理
2.系统设备组成与布置 (1)现场设备 TW-2系统的室外采集和执行设备包括: ①道岔转辙设备。 ②轨道电路。 ③色灯信号机。 ④车辆减速器。 ⑤雷达。 ⑥轮轴探测器(踏板)。 ⑦测长轨道电路。 ⑧测重
2. 系统设备组成与布置 (1)现场设备 TW-2系统的室外采集和执行设备包括: ①道岔转辙设备。 ②轨道电路。 ③色灯信号机。 ④车辆减速器。 ⑤雷达。 ⑥轮轴探测器(踏板)。 ⑦测长轨道电路。 ⑧测重
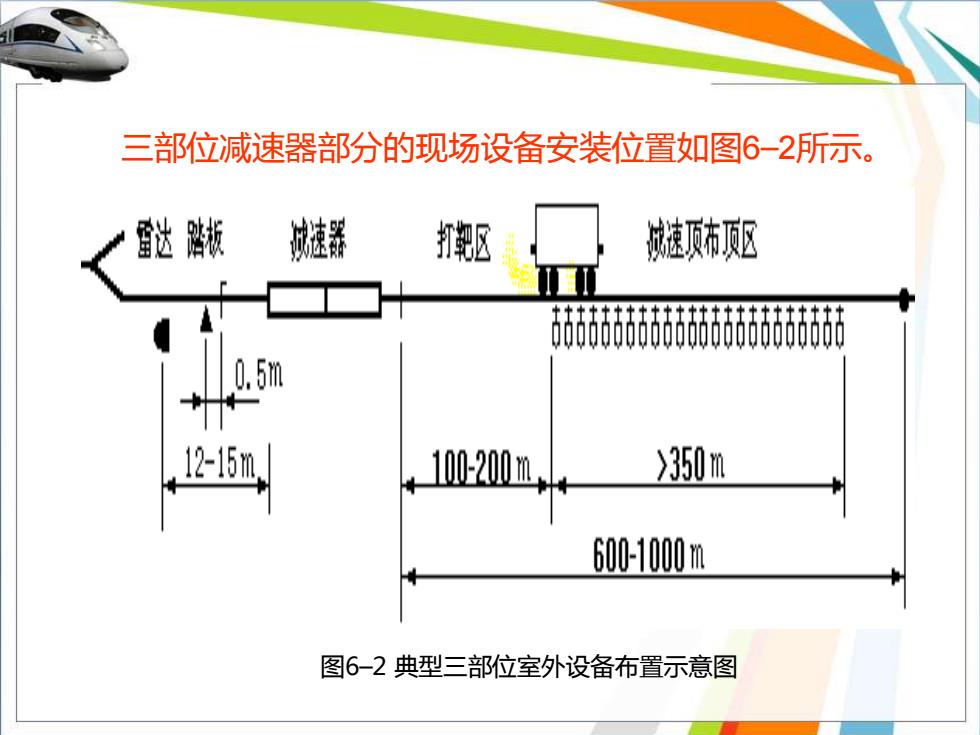
三部位减速器部分的现场设备安装位置如图6-2所示。 鞑叛 速器 打区 速顶杰感 12-15n ,10-200m )350M 600-1000m 图6-2典型三部位室外设备布置示意图
三部位减速器部分的现场设备安装位置如图6–2所示。 图6–2 典型三部位室外设备布置示意图