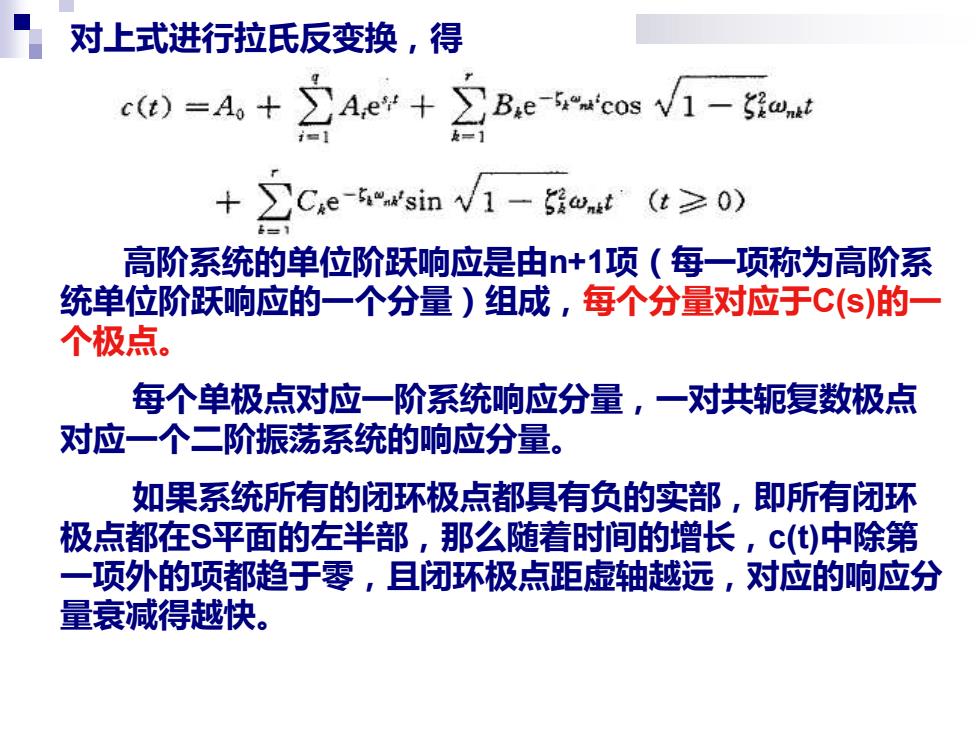
对上式进行拉氏反变换,得 c()=+eBe-cos1 S是ant +∑Cxei'sin√1-t(t≥0) 高阶系统的单位阶跃响应是由+1项(每一项称为高阶系 统单位阶跃响应的一个分量)组成,每个分量对应于C(S)的一 个极点。 每个单极点对应一阶系统响应分量,一对共轭复数极点 对应一个二阶振荡系统的响应分量。 如果系统所有的闭环极点都具有负的实部,即所有闭环 极点都在S平面的左半部,那么随着时间的增长,c()中除第 一项外的项都趋于零,且闭环极点距虚轴越远,对应的响应分 量衰减得越快
对上式进行拉氏反变换,得 高阶系统的单位阶跃响应是由n+1项(每一项称为高阶系 统单位阶跃响应的一个分量)组成,每个分量对应于C(s)的一 个极点。 每个单极点对应一阶系统响应分量,一对共轭复数极点 对应一个二阶振荡系统的响应分量。 如果系统所有的闭环极点都具有负的实部,即所有闭环 极点都在S平面的左半部,那么随着时间的增长,c(t)中除第 一项外的项都趋于零,且闭环极点距虚轴越远,对应的响应分 量衰减得越快
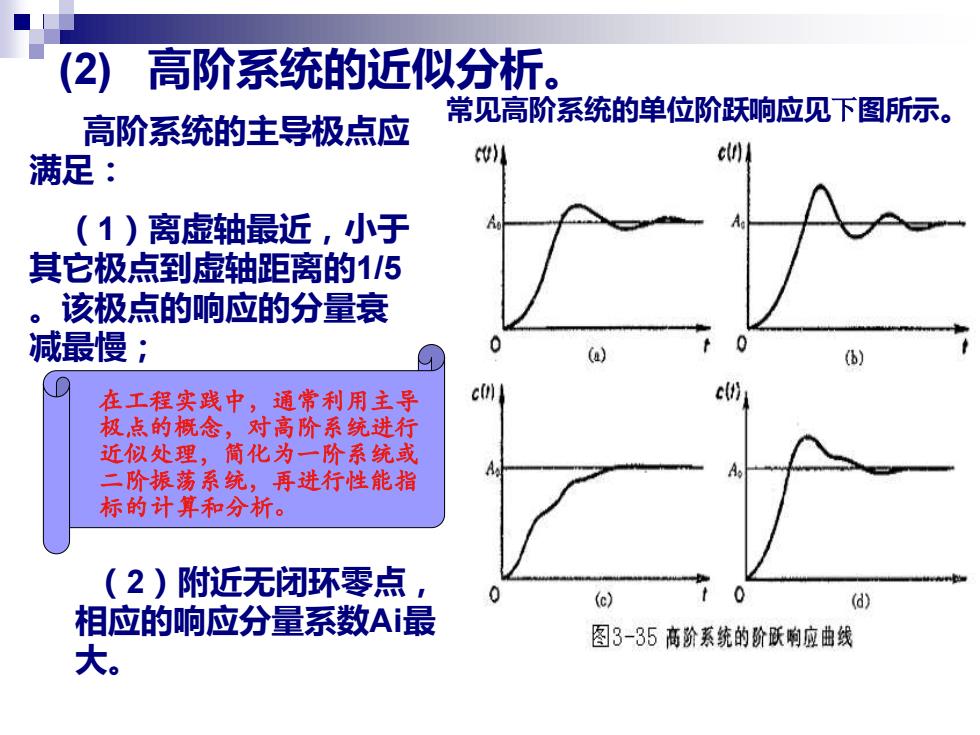
高阶系统的近似分析。 常见高阶系统的单位阶跃响应见下图所示。 高阶系统的主导极点应 满足 c(n (1)离虚轴最近,小于 其它极点到虚轴距离的115 。该极点的响应的分量衰 减最慢; 在工程实践中,通常利用主导 c(n c 极,点的概念,对高阶系统进行 近似处理,简化为一阶系统或 二阶振荡系統,再进行性能指 标的计算和分析。 (2)附近无闭环零点, (c) 0 (d) 相应的响应分量系数A最 图3-35高阶系统的阶跃响应曲线 大
(2) 高阶系统的近似分析。 常见高阶系统的单位阶跃响应见下图所示。 高阶系统的主导极点应 满足: (1)离虚轴最近,小于 其它极点到虚轴距离的1/5 。该极点的响应的分量衰 减最慢; (2)附近无闭环零点, 相应的响应分量系数Ai最 大。 在工程实践中,通常利用主导 极点的概念,对高阶系统进行 近似处理,简化为一阶系统或 二阶振荡系统,再进行性能指 标的计算和分析
主导极点可能是单个实数极点,也 可能是共轭复数极点。前者可用一阶系 统近似代替,后者可用二阶振荡系统近 似代替
主导极点可能是单个实数极点,也 可能是共轭复数极点。前者可用一阶系 统近似代替,后者可用二阶振荡系统近 似代替
系统稳定性分析 一、 系统稳定的概念 口是指系统当扰动作用消失后,由初始偏差 状态恢复到原平衡状态的性能。 ▣若系统能恢复平衡状态,就称该系统是稳 定的,若系统在扰动作用消失后不能恢复 平衡状态,且偏差越来越大,则称系统是 不稳定的
一、系统稳定的概念 ❑ 是指系统当扰动作用消失后,由初始偏差 状态恢复到原平衡状态的性能。 ❑ 若系统能恢复平衡状态,就称该系统是稳 定的,若系统在扰动作用消失后不能恢复 平衡状态,且偏差越来越大,则称系统是 不稳定的。 系统稳定性分析
■系统稳定的充分必要条件是: 系统的特征方程的所有根都具有负实部, 或者说都位于S平面的虚轴之左。 注:拉氏变换性质中的终值定理的适用条件: SE(S在S平面的右半平面解析,就是上面稳定条 件的另一种表示,即特征方程的所有根S,位于S平 面的虚轴之左
◼ 系统稳定的充分必要条件是: 系统的特征方程的所有根都具有负实部, 或者说都位于S平面的虚轴之左。 注:拉氏变换性质中的终值定理的适用条件: SE(S)在S平面的右半平面解析,就是上面稳定条 件的另一种表示,即特征方程的所有根Si位于S平 面的虚轴之左