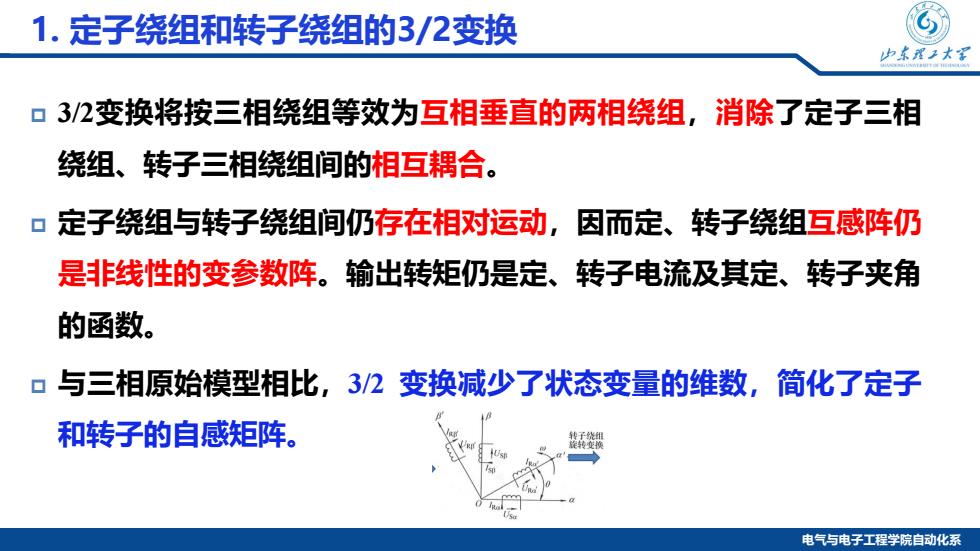
1.定子绕组和转子绕组的3/2变换 中东理子大军 ▣3/2变换将按三相绕组等效为互相垂直的两相绕组,消除了定子三相 绕组、转子三相绕组间的相互耦合。 口定子绕组与转子绕组间仍存在相对运动,因而定、转子绕组互感阵仍 是非线性的变参数阵。输出转矩仍是定、转子电流及其定、转子夹角 的函数。 ▣与三相原始模型相比,3/2变换减少了状态变量的维数,简化了定子 和转子的自感矩阵。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 3/2变换将按三相绕组等效为互相垂直的两相绕组,消除了定子三相 绕组、转子三相绕组间的相互耦合。 定子绕组与转子绕组间仍存在相对运动,因而定、转子绕组互感阵仍 是非线性的变参数阵。输出转矩仍是定、转子电流及其定、转子夹角 的函数。 与三相原始模型相比,3/2 变换减少了状态变量的维数,简化了定子 和转子的自感矩阵。 1. 定子绕组和转子绕组的3/2变换

2.静止两相正交坐标系中的方程 少东理2大军 口对转子坐标系作旋转正交坐标系到静止两相正交坐标系的变换,使其与 定子坐标系重合,且保持静止。 cose -sine C2r12,(0)= sin0 cos0 转子绕组 用静止的两相转子正交绕组等效 旋转变换 代替原先转动的两相绕组。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 2. 静止两相正交坐标系中的方程 对转子坐标系作旋转正交坐标系到静止两相正交坐标系的变换,使其与 定子坐标系重合,且保持静止。 用静止的两相转子正交绕组等效 代替原先转动的两相绕组。 2 /2 cos sin ( ) sin cos C r s θ θ θ θ θ − =