
同时有旋转和平移的情况 ·对象若同时有旋转和平移,则可以分别列出旋转 矩阵和平移矩阵。不过此时的旋转矩阵也要改为 3×3维,这可以把上述A,中增加第三行和第三列, 置A(3,3)=1,其余新增元素为零。 cos t -sin t ci A5= sin t cos t C2 0 。 这就是既包括平移,又包括转动的平面齐次坐标 系内的变换矩阵
同时有旋转和平移的情况 • 对象若同时有旋转和平移,则可以分别列出旋转 矩阵和平移矩阵。不过此时的旋转矩阵也要改为 33维,这可以把上述A5中增加第三行和第三列, 置A(3,3)=1,其余新增元素为零。 • 这就是既包括平移,又包括转动的平面齐次坐标 系内的变换矩阵。 1 2 cos t sin t c sin t cos t c , 0 0 1 − = A5
例9.3 刚体平面运动描述 ·设三角形的三个顶点坐标为(-1,1),(1,1),(0,2),今要使它旋 转30度,右移2,上移3,以试设计变换矩阵A,并画出变 换前后的图形。 ·解:程序的要点是: 6 1。列出三角形的数据矩阵 2。扩展为齐次坐标(第三行加1) 3。平移和转动变换矩阵也 要用三维的变换矩阵 4。按变换次序左乘 5。绘图
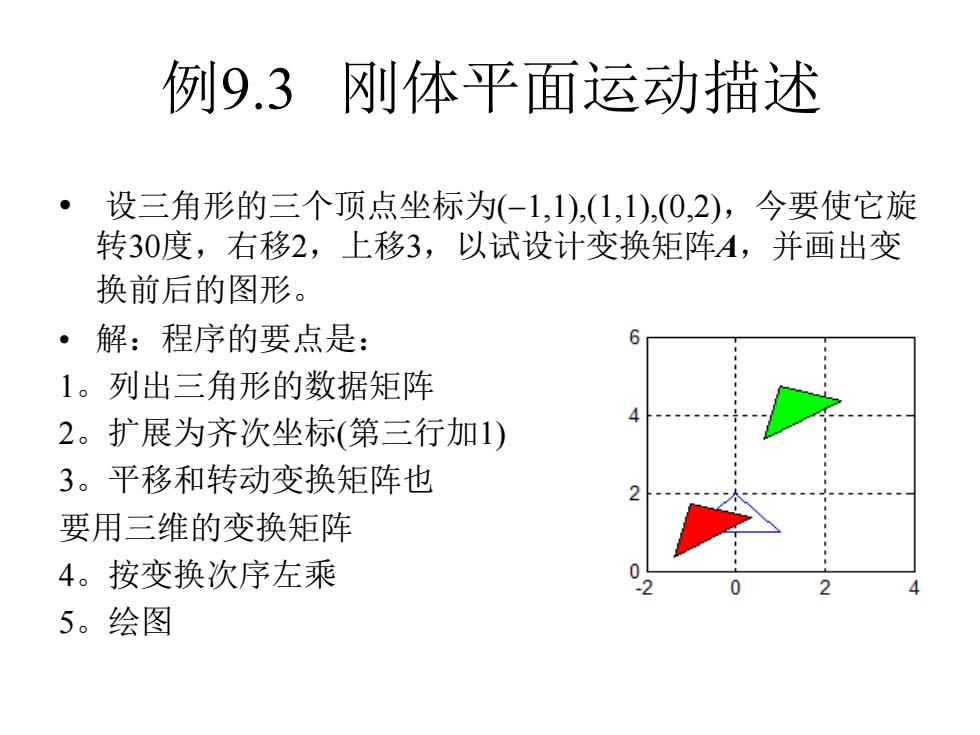
例9.3 刚体平面运动描述 • 设三角形的三个顶点坐标为(−1,1),(1,1),(0,2),今要使它旋 转30度,右移2,上移3,以试设计变换矩阵A,并画出变 换前后的图形。 • 解:程序的要点是: 1。列出三角形的数据矩阵 2。扩展为齐次坐标(第三行加1) 3。平移和转动变换矩阵也 要用三维的变换矩阵 4。按变换次序左乘 5。绘图

9.3空间线性变换的几何意义 ·三维空间线性变换最直接的几何意义和应用价值 可以从飞行器的三维转动坐标中得到解释。飞行 器在空中可以围绕三个轴旋转。假如它在向北飞 行,机头正对北方,则它围绕铅垂轴的旋转角称 为偏航角(Yaw),它描述了飞机左右的偏转, 用u表示;围绕翼展轴的旋转角称为倾斜角 (Pitch),它描述了飞俯仰姿态,用v表示;围 绕机身轴的旋转角称为滚动角(Rol),用w表示; u,v和w三个变量统称为欧拉角,它们完全地描述 了飞机的姿态
9.3 空间线性变换的几何意义 • 三维空间线性变换最直接的几何意义和应用价值 可以从飞行器的三维转动坐标中得到解释。飞行 器在空中可以围绕三个轴旋转。假如它在向北飞 行,机头正对北方,则它围绕铅垂轴的旋转角称 为偏航角(Yaw),它描述了飞机左右的偏转, 用u表示;围绕翼展轴的旋转角称为倾斜角 (Pitch),它描述了飞机俯仰姿态,用v表示;围 绕机身轴的旋转角称为滚动角(Roll),用w表示; u,v和w三个变量统称为欧拉角,它们完全地描述 了飞机的姿态

演示程序quatdemo Quaternion Demonstration ☒ Euler Ange 1804 Deg 0 小 Deg 40 0-f0160.093020.9期 Azimuth 306423 Deg +/6 Elevation 136.8676 Deg 180 Beta 31.1254 Deg 小 Static Heb Cose 开始】Dat165wr。AE 砂第五章线性变共,,0 atornion Denon 回79格9人43
演示程序quatdemo

演示画面的说明 画面中。左方为飞行器在三维空间中的模型,其 中红色的是飞行器。右上方为三个姿态角u,V,w的 设定标尺和显示窗,右下方为在地面坐标系中的 另外的三个姿态角:方位角、俯仰角和倾侧角。 左下方还有【静态】和【动态】两个复选钮,我 们只介绍【静态】,读者可自行试用【动态】进 行演示。 用键入参数或移动标尺的方法分别给u,V,w赋值并 回车后,就可以得出相应的飞行器姿态,同时出 现一根蓝色的线表示合成旋转的转轴
演示画面的说明 • 画面中。左方为飞行器在三维空间中的模型,其 中红色的是飞行器。右上方为三个姿态角u,v,w的 设定标尺和显示窗,右下方为在地面坐标系中的 另外的三个姿态角:方位角、俯仰角和倾侧角。 左下方还有【静态】和【动态】两个复选钮,我 们只介绍【静态】,读者可自行试用【动态】进 行演示。 • 用键入参数或移动标尺的方法分别给u,v,w赋值并 回车后,就可以得出相应的飞行器姿态,同时出 现一根蓝色的线表示合成旋转的转轴