课程介绍 参考资料 教材: 机器人操作系统(ros) 参考资料: 1.胡春旭.Ros机器人开发实践.机械工业出版社 2.周兴社等.机器人操作系统ROS原理与应用.机械工业出版社 线上资源: 1.古月.Ros入门21讲 2.爱课程.机器人操作系统 8
课程介绍 参考资料 教材: 机器人操作系统(ros) 参考资料: 1. 胡春旭. Ros机器人开发实践. 机械工业出版社 2. 周兴社等. 机器人操作系统ROS原理与应用. 机械工业出版社 线上资源: 1. 古月. Ros入门21讲 2. 爱课程. 机器人操作系统
1.1 极限与配合的基本知识 1.1.1极很与配合的基本术语及定义 孔和轴 (2)轴 (1)孔 轴是指工件的圆柱外表面,也包括非圆柱外表面 孔是指工件的 (由二平行平面或切面形成的被包容面),如图(b)所 圆柱内表面,也包 示。轴的直径尺寸用d表示。 括非圆柱内表面(由 槽宽(孔) 槽宽(孔) 二平行平面或切面 形成的包容面),如 轴 图(a)所示。孔的直 径尺寸用D表示。 孔和轴
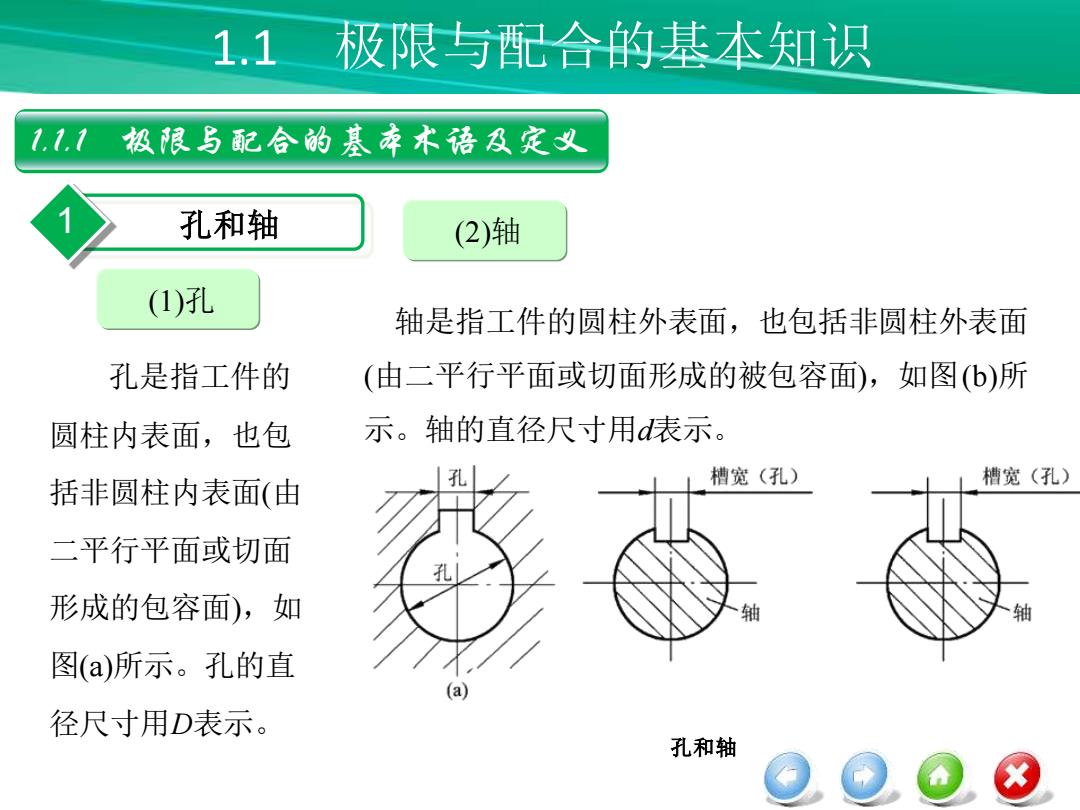
1.1 极限与配合的基本知识 1.1.1 极限与配合的基本术语及定义 1 孔和轴 孔是指工件的 圆柱内表面,也包 括非圆柱内表面(由 二平行平面或切面 形成的包容面),如 图(a)所示。孔的直 径尺寸用D表示。 (1)孔 孔和轴 (2)轴 轴是指工件的圆柱外表面,也包括非圆柱外表面 (由二平行平面或切面形成的被包容面),如图(b)所 示。轴的直径尺寸用d表示
1.1 极限与配合的基本知识 1.1.2 有关要素的术语及定义 要素 尺寸要素 要素即构成零件 尺寸要素是指由一定大小 几何特征的点、线、 的线性尺寸或角度尺寸确定的 面。 几何形状。 尺寸 公称尺寸 尺寸是用特定 公称尺寸是由设计给定的,通过强度、 单位表示线性尺寸 刚度等方面的计算或结构需要,并考虑工 的数值。 艺方面的要求后确定的,孔用D表示,轴 用d表示
1.1 极限与配合的基本知识 1.1.2 有关要素的术语及定义 3 尺寸 尺寸是用特定 单位表示线性尺寸 的数值。 4 公称尺寸 公称尺寸是由设计给定的,通过强度、 刚度等方面的计算或结构需要,并考虑工 艺方面的要求后确定的,孔用D表示,轴 用d表示。 1 要素 2 尺寸要素 要素即构成零件 几何特征的点、线、 面。 尺寸要素是指由一定大小 的线性尺寸或角度尺寸确定的 几何形状
1.1 极限与配合的基本知识 1.1.2 有关要素的术语及定义 实际(组成)要素 实际(组成)要素是指由接近实际(组成)要素所限定的工件实际表面的 组成要素部分。 极限尺寸 极限尺寸是指尺寸要素允许的两个极端尺寸 尺寸要素允许的最大尺寸称为上极限尺寸;尺寸要素允许的最小尺寸称 为下极限尺寸。孔或轴的上极限尺寸分别用Dmax和dma表示;下极限尺寸分 别用Dmn’和dnmn表示
1.1 极限与配合的基本知识 1.1.2 有关要素的术语及定义 5 实际(组成)要素 实际(组成)要素是指由接近实际(组成)要素所限定的工件实际表面的 组成要素部分。 6 极限尺寸 极限尺寸是指尺寸要素允许的两个极端尺寸 尺寸要素允许的最大尺寸称为上极限尺寸;尺寸要素允许的最小尺寸称 为下极限尺寸。孔或轴的上极限尺寸分别用Dmax和dmax表示;下极限尺寸分 别用Dmin,和dmin表示
1.1 极限与配合的基本知识 1.1.3 有关尺寸偏差、公差的术语及定义 尺寸偏差 实际偏差 某一尺寸减其公称尺寸所得 实际尺寸减其公称尺寸所 的代数差称为尺寸偏差(简称偏 得的代数差称为实际偏差。 差)。偏差可能为正或负,也可能 为零。 极限偏差 (1)上极限偏差:上极限尺寸减其公称尺寸所得的代数差称为上极限偏 差。孔的上极限偏差用ES表示;轴的上极限偏差用es表示。 (2)下极限偏差:下极限尺寸减其公称尺寸所得的代数差称为下极限偏 差。孔的下极限偏差用EI表示;轴的下极限偏差用ei表示
1.1 极限与配合的基本知识 1.1.3 有关尺寸偏差、公差的术语及定义 3 极限偏差 (1)上极限偏差:上极限尺寸减其公称尺寸所得的代数差称为上极限偏 差。孔的上极限偏差用ES表示;轴的上极限偏差用es表示。 (2)下极限偏差:下极限尺寸减其公称尺寸所得的代数差称为下极限偏 差。孔的下极限偏差用EI表示;轴的下极限偏差用ei表示。 1 尺寸偏差 2 实际偏差 某一尺寸减其公称尺寸所得 的代数差称为尺寸偏差(简称偏 差)。偏差可能为正或负,也可能 为零。 实际尺寸减其公称尺寸所 得的代数差称为实际偏差