神经网络和模糊系统 第五章 突触动力学川:有监督的学习 张文革 2006.11
神经网络和模糊系统 第五章 突触动力学Ⅱ:有监督的学习 张文革 2006.11
突触动力学川:有监督的学习 本章内容: 一、预备知识 二、有监督的函数估计 三、监督学习就是有效的训练 四、已知类隶属度的监督学习 五、感知器、MLS和BP算法
突触动力学Ⅱ:有监督的学习 本章内容: 一、预备知识 二、有监督的函数估计 三、监督学习就是有效的训练 四、已知类隶属度的监督学习 五、感知器、MLS和BP算法
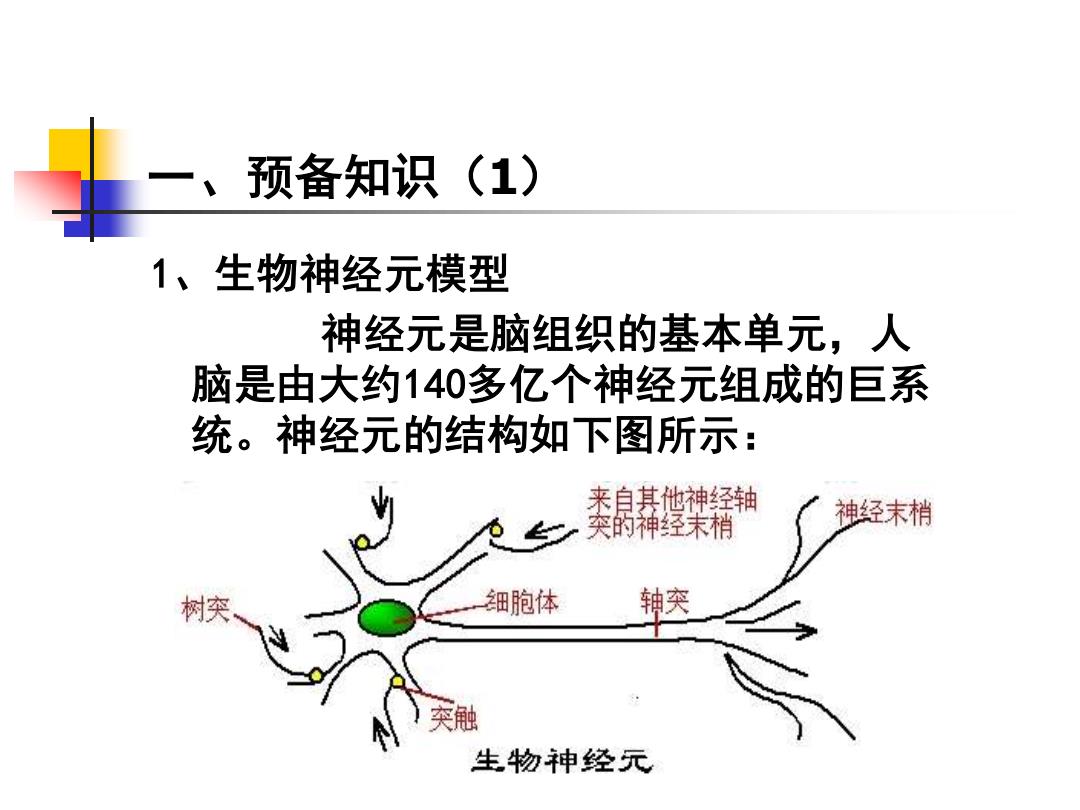
、预备知识(1) 1、生物神经元模型 神经元是脑组织的基本单元,人 脑是由大约140多亿个神经元组成的巨系 统。神经元的结构如下图所示: 来自其他神经轴 突的神经末梢 神经末梢 树突 細胞体 轴突 突触 生物神经元
一、预备知识(1) 1、生物神经元模型 神经元是脑组织的基本单元,人 脑是由大约140多亿个神经元组成的巨系 统。神经元的结构如下图所示:
、预备知识(2) 2、神经元的突触 突触是两个细胞之间连接的基本单元, 每个细胞约有103一104个突触。突触主 要有两种连接方式: 一是一个神经细胞的轴突与另一个神经细 胞的树突发生接触; 二是一个神经细胞的轴突与另一个神经细 胞的胞体接触
一、预备知识(2) 2、神经元的突触: 突触是两个细胞之间连接的基本单元, 每个细胞约有 个突触。突触主 要有两种连接方式: 一是一个神经细胞的轴突与另一个神经细 胞的树突发生接触; 二是一个神经细胞的轴突与另一个神经细 胞的胞体接触。 3 4 10 −10
、预备知识(3) 突触有两种类型 兴奋型和抑制型。 突触的界面具有脉冲/电位信号转换功 能,它能将沿神经纤维传递的等幅、恒 宽、编码的离散脉冲信号,转换为细胞 膜可以处理的连续电位信号
一、预备知识(3) 突触有两种类型: 兴奋型和抑制型。 突触的界面具有脉冲/电位信号转换功 能,它能将沿神经纤维传递的等幅、恒 宽、编码的离散脉冲信号,转换为细胞 膜可以处理的连续电位信号