模糊与卡尔曼滤波目标跟踪控制系统的比较 Comparison of Fuzzy and Kalman-Filter Target-Tracking control system Peter J.Pacini,Bart Kosko 报告人:宋骊平
模糊与卡尔曼滤波目标跟踪控制系统的比较 Comparison of Fuzzy and Kalman-Filter Target-Tracking control system 报告人:宋骊平 Peter J.Pacini , Bart Kosko
内容简个 1、模糊控制器与卡尔曼滤波器的比拉 2、实时目标跟踪系统 3、模糊控制器的工作原理 4、卡尔曼跟踪与模糊跟踪伤真 5、面适应FAM
1、模糊控制器与卡尔曼滤波器的比较 3、模糊控制器的工作原理 2、实时目标跟踪系统 内容简介 5、自适应FAM 4、卡尔曼跟踪与模糊跟踪仿真
模糊控制器与卡尔曼滤波器的比较 卡尔曼滤波器需要 模糊控制器是 明确的数学模型来定义 一个模糊系统, 输出与输入之间的关系 其输出与输入之 Xk=Φkk-1Xk-1+「kk-Uk-1+Wk-l 间没有经典的数 学模型。 ZR=HkXk +VR 通过测量估计真实代价(最小 均方误差) 递推
模糊控制器与卡尔曼滤波器的比较 卡尔曼滤波器需要 明确的数学模型来定义 输出与输入之间的关系 模糊控制器是 一个模糊系统, 其输出与输入之 间没有经典的数 , −1 −1 , −1 −1 −1 学模型。 Xk = k k Xk + k k Uk +Wk Zk = Hk Xk +Vk 通过测量估计真实 代价(最小 均方误差) 递推

数学模型控制器的问题 数学模型控制器在输出和输入的函数关系确定的情况下的 工作性能会很好。对于不确定的环境,数学模型控制器一般 采用概率分布来描述。存在以下问题: (1)不确定性一般很难用经典数据模型加以准确描述。 (2)很难将专家的知识加到系统中去,在这种系统中, 专家的知识一般只能用来估计初始状态和协方差条件
数学模型控制器的问题 数学模型控制器在输出和输入的函数关系确定的情况下的 工作性能会很好。对于不确定的环境,数学模型控制器一般 采用概率分布来描述。存在以下问题: (1)不确定性一般很难用经典数据模型加以准确描述。 (2)很难将专家的知识加到系统中去,在这种系统中, 专家的知识一般只能用来估计初始状态和协方差条件
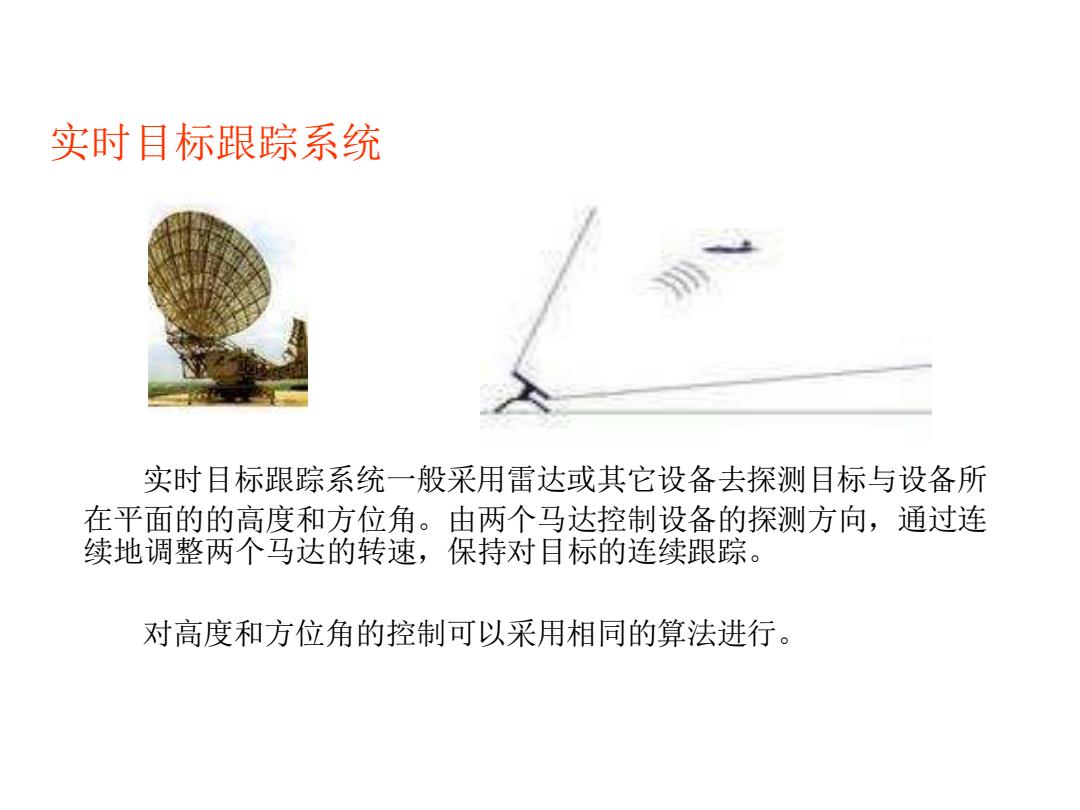
实时目标跟踪系统 实时目标跟踪系统一般采用雷达或其它设备去探测目标与设备所 在平面的的高度和方位角。由两个马达控制设备的探测方向,通过连 续地调整两个马达的转速,保持对目标的连续跟踪。 对高度和方位角的控制可以采用相同的算法进行
实时目标跟踪系统 实时目标跟踪系统一般采用雷达或其它设备去探测目标与设备所 在平面的的高度和方位角。由两个马达控制设备的探测方向,通过连 续地调整两个马达的转速,保持对目标的连续跟踪。 对高度和方位角的控制可以采用相同的算法进行