
WELCOME 第九章模糊与神经网络倒车系统比较 池峰 韩冰 指导教师:高新波 教授 ccc 西安电子科技大学电子工程学院 School of Electronte Engineering 111111u
第九章 模糊与神经网络倒车系统比较 池 峰 韩 冰 指导教师: 高新波 教授

Home OUTLINE ●Backing up a truck Fuzzy truck backer-upper system © Neural truck backer-upper system © Comparison of fuzzy and neural systems © Sensitivity analysis © Adaptive fuzzy truck backer-upper Fuzzy truck-and-trailer controller © BP truck-and-trailer control systems AFAM truck-and-trailer control systems ●Conclusion ●Reference cec 西安电子科技大学电子工程学院 School of Electronfc Engineering 1111111
OUTLINE lBacking up a truck ☺Fuzzy truck backer-upper system ☺Neural truck backer-upper system ☺Comparison of fuzzy and neural systems ☺Sensitivity analysis ☺Adaptive fuzzy truck backer-upper lFuzzy truck-and-trailer controller ☺BP truck-and-trailer control systems ☺AFAM truck-and-trailer control systems lConclusion lReference
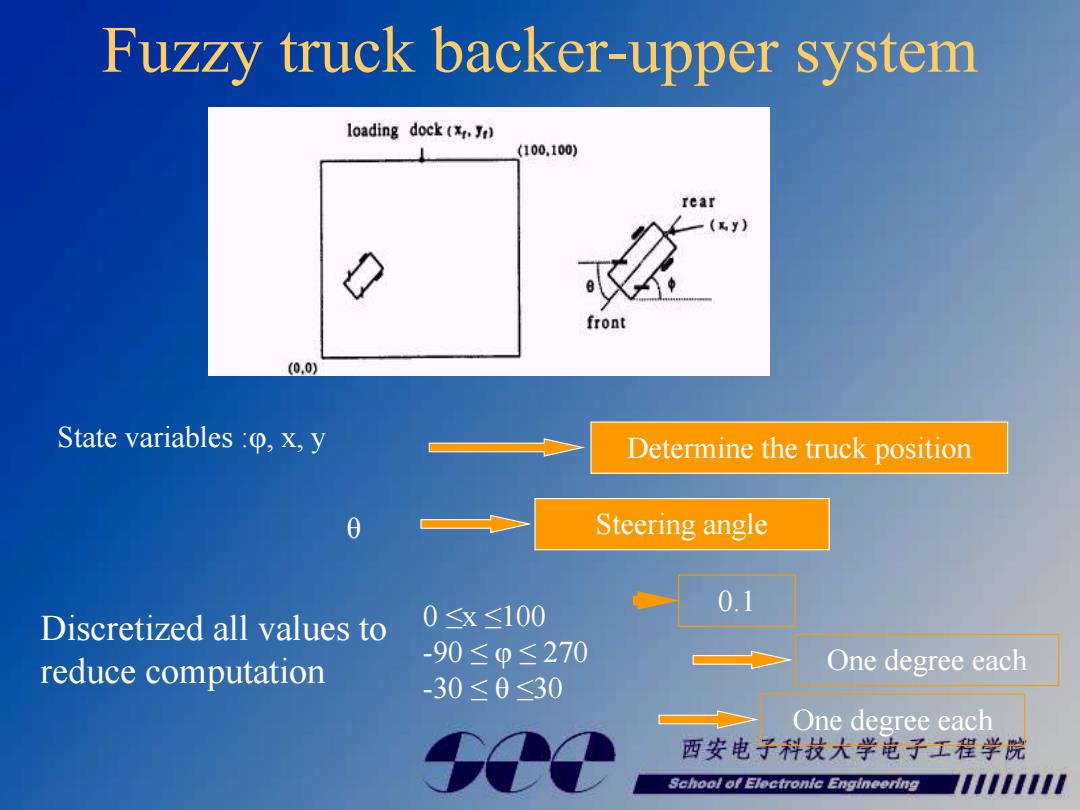
Fuzzy truck backer-upper system loading dock (x.J) (100,100) rear 一(%y) front (0.0】 State variables :x,y Determine the truck position Steering angle 0≤x≤100 0.1 Discretized all values to -90≤0≤270 reduce computation One degree each -30≤0≤30 One degree each 2 西安电子科技大学屯子工程学院 School of Electronte Engineering 1111111
State variables :φ, x, y θ Steering angle Determine the truck position 0 ≤x ≤100 -90 ≤ φ ≤ 270 -30 ≤ θ ≤30 0.1 One degree each One degree each Discretized all values to reduce computation Fuzzy truck backer-upper system
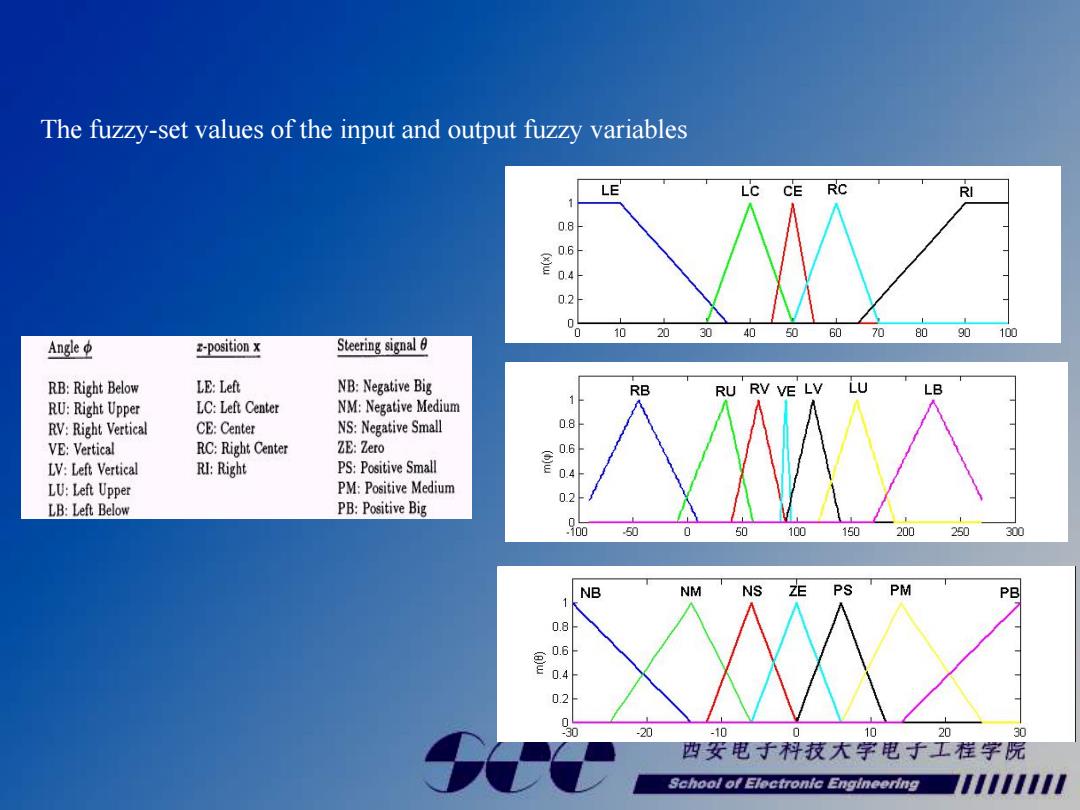
The fuzzy-set values of the input and output fuzzy variables LE LC CE RC RI 08 06 0.4 0.2 10 20 30 40 50 60 70 80 90 100 Angle -positionx Steering signal RB:Right Below LE:Left NB:Negative Big RB RU RV VE LV LU LB RU:Right Upper LC:Left Center NM:Negative Medium RV:Right Vertical CE:Center NS:Negative Small 0.8 VE:Vertical RC:Right Center ZE:Zero 06 LV:Left Vertical RI:Right PS:Positive Small 0.4 LU:Left Upper PM:Positive Medium PB:Positive Big 0.2 LB:Left Below 100 50 0 50 100 150 200 250 300 NB NM NS ZE PS PM PB 1 毫 0.6 0.2 0 0 -20 -10 10 20 30 西安电于科技大学电工程学阮 School of Electronfe Engineering 1111I11
The fuzzy-set values of the input and output fuzzy variables
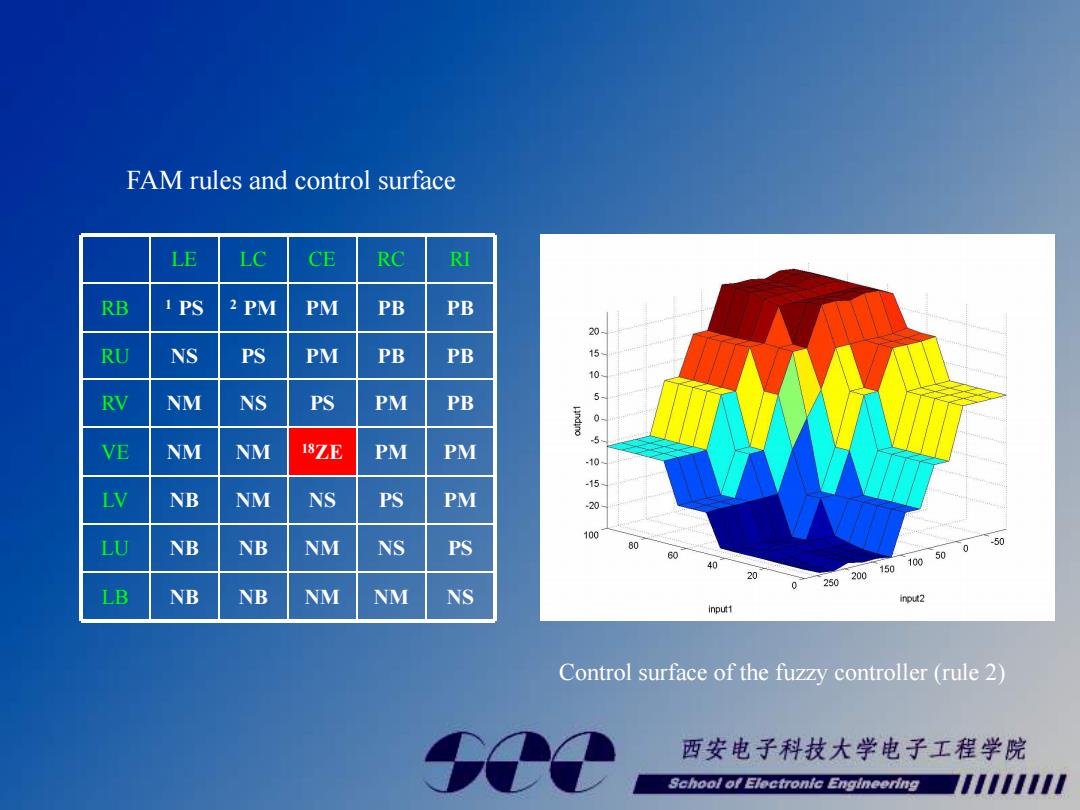
FAM rules and control surface LE LC CE RC RI RB 1PS 2PM PM PB PB 20 RU NS PS PM PB PB 5105 RV NM NS PS PM PB 0 VE NM NM I8ZE PM PM 5 0 LV NB NM NS PS PM 20 100 LU NB NB NM NS PS 60 50 40 025020015010500 LB NB NB NM NM NS input2 input1 Control surface of the fuzzy controller(rule 2) ccc 西安电子科技大学电子工程学院 School of Electronie Engineering 1111111
FAM rules and control surface LE LC CE RC RI RB 1 PS 2 PM PM PB PB RU NS PS PM PB PB RV NM NS PS PM PB VE NM NM 18ZE PM PM LV NB NM NS PS PM LU NB NB NM NS PS LB NB NB NM NM NS Control surface of the fuzzy controller (rule 2)