chapter5突触动力学Ⅱ一 有监督学习 学号:0622310213 姓名:余景景
chapter 5 突触动力学Ⅱ—— 有监督学习 学号:0622310213 姓名: 余 景 景
本章内容要点 有监督学习的理论解释 。有监督的函数估计 0 有监督的学习相当于操作性条件反射 。有监督的学习相当于有先验知识的随机模式学习 前馈网络的监督学习算法 感知器 最小均方误差(LMS)算法 反向传播(BP)算法
本章内容要点 ◼ 有监督学习的理论解释 有监督的函数估计 有监督的学习相当于操作性条件反射 有监督的学习相当于有先验知识的随机模式学习 ◼ 前馈网络的监督学习算法 感知器 最小均方误差(LMS)算法 反向传播(BP) 算法
第一部分内容 有监督学习和无监督学习 有监督的函数估计 ·有监督学习相当于操作性条件反射 ·有监督学习相当于有先验知识的随机模式学习
第一部分内容 ◼ 有监督学习和无监督学习 ◼ 有监督的函数估计 ◼ 有监督学习相当于操作性条件反射 ◼ 有监督学习相当于有先验知识的随机模式学习
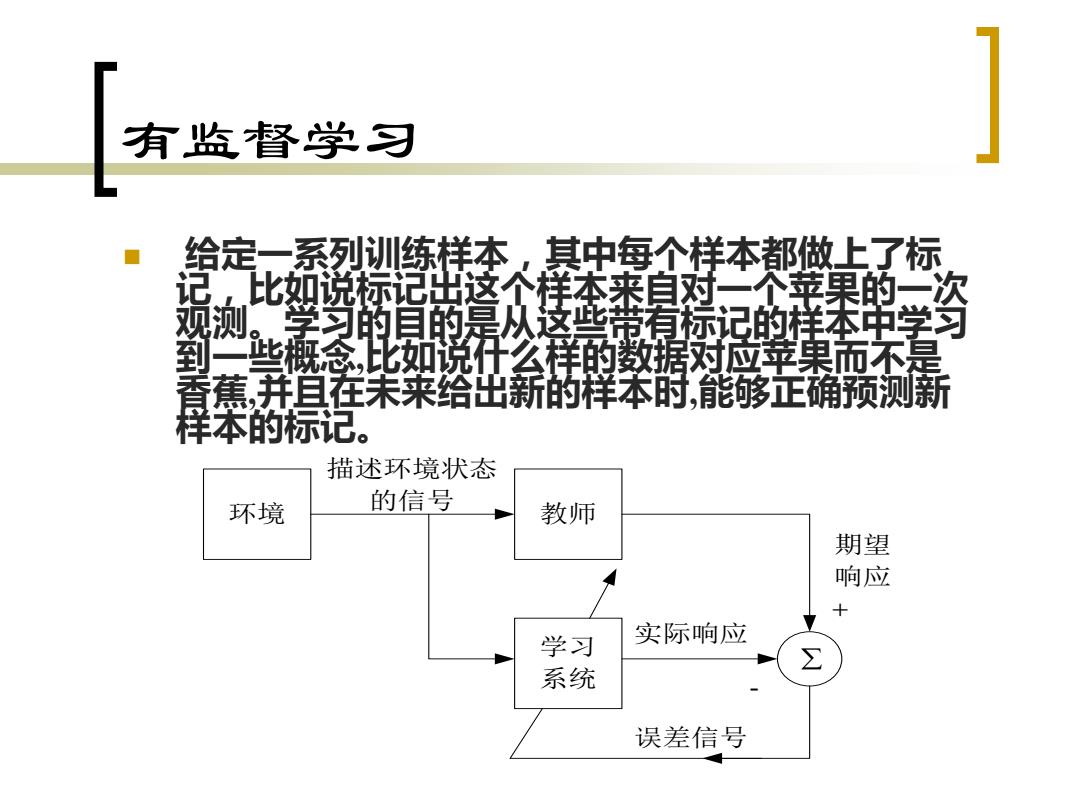
有监督学习 系列训训练样本 其中每个样本都做上了标 ,比如说标记出这 样本来自对二个苹果的一次 观测。学习的的嘉从这带看标记的样本革学习 到香样 一些概念,比如说行公样的数据对应苹果市不是 蕉,并耳在耒莱给出新的样本时,能够正确预测新 本的际记。 描述环境状态 环境 的信号 教师 期望 响应 十 学习 实际响应 系统 误差信号
有监督学习 ◼ 给定一系列训练样本,其中每个样本都做上了标 记,比如说标记出这个样本来自对一个苹果的一次 观测。学习的目的是从这些带有标记的样本中学习 到一些概念,比如说什么样的数据对应苹果而不是 香蕉,并且在未来给出新的样本时,能够正确预测新 样本的标记。 环境 教师 学习 系统 实际响应 误差信号 期望 响应 描述环境状态 的信号 + -
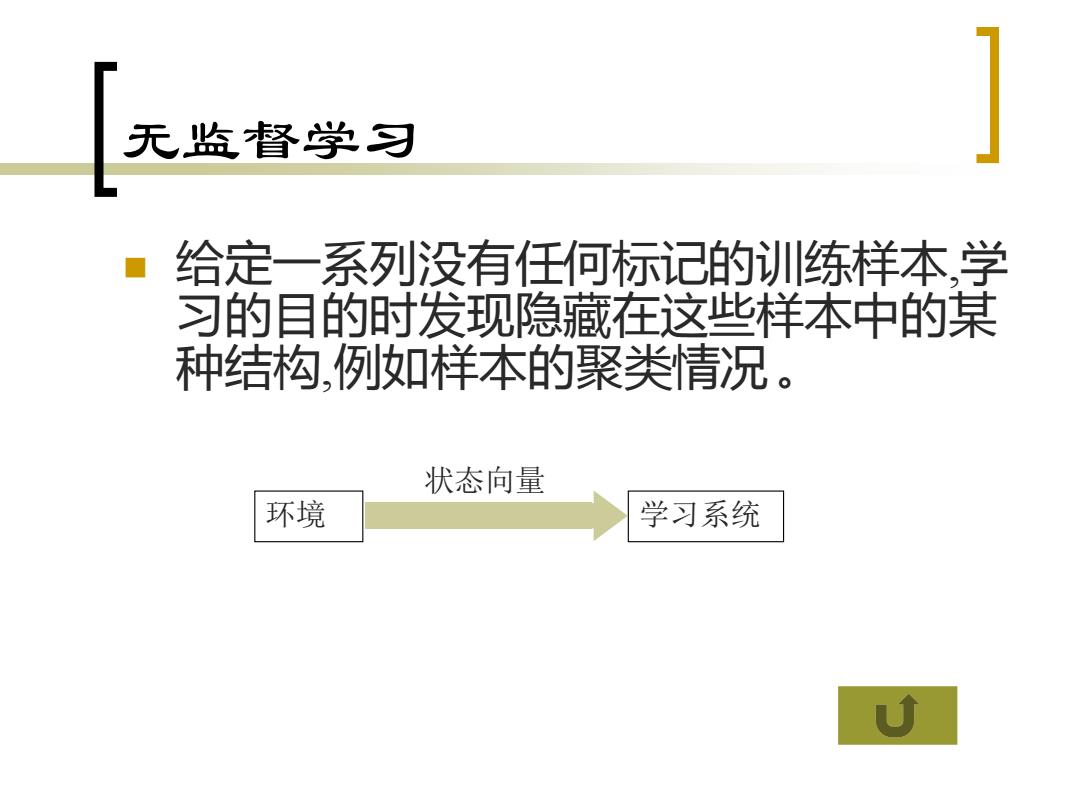
无监督学习 ■ 给定一系列没有任何标记的训练样本,学 习的目的时发现隐藏在这些样本中的某 种结构,例如样本的聚类情况。 状态向量 环境 学习系统 U
无监督学习 ◼ 给定一系列没有任何标记的训练样本,学 习的目的时发现隐藏在这些样本中的某 种结构,例如样本的聚类情况。 环境 学习系统 状态向量