
(1)在邛坐标系上计算转子磁链的电流模型 少求理2大军 口计算转子磁链在、轴上的分量 dΨr二一 1 少1 T rB a d三一 (7-85) 1 dt rB +01 电气与电子工程学院自动化系
电气与电子工程学院自动化系 (1)在αβ坐标系上计算转子磁链的电流模型 计算转子磁链在α、β轴上的分量 β α β β α β α α ψ ωψ ψ ψ ωψ ψ s r m r r r r s r m r r r r i T L dt T d i T L dt T d = − + + = − − + 1 1 (7-85)
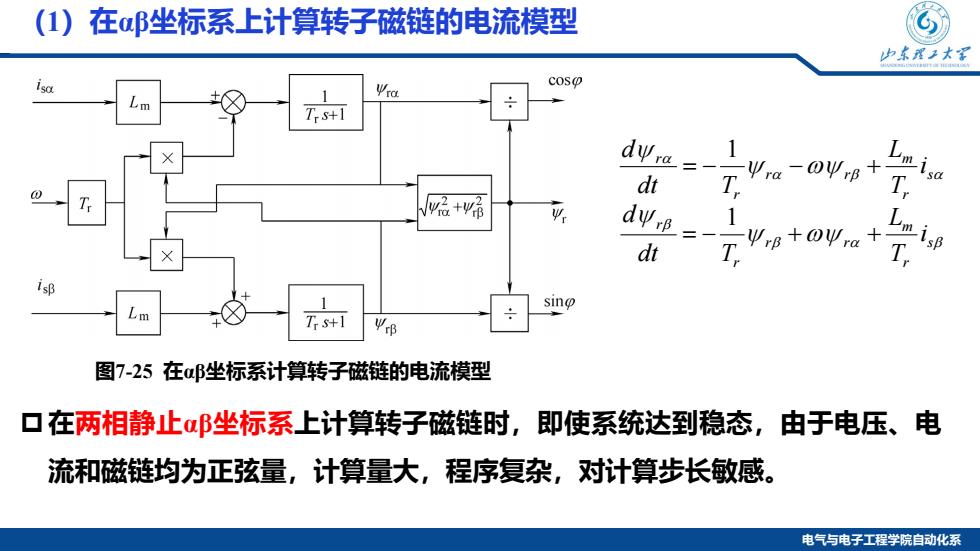
(1)在邱坐标系上计算转子磁链的电流模型 中东理工大等 coso Trs+1 dΨra二一 1 dt yra-0r+- T dyB二 1 dt B+0Ψa+ s 1 sino Trs+1 y: 图7-25在α邛坐标系计算转子磁链的电流模型 ▣在两相静止α邱坐标系上计算转子磁链时,即使系统达到稳态,由于电压、电 流和磁链均为正弦量,计算量大,程序复杂,对计算步长敏感。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 图7-25 在αβ坐标系计算转子磁链的电流模型 (1)在αβ坐标系上计算转子磁链的电流模型 β α β β α β α α ψ ωψ ψ ψ ωψ ψ s r m r r r r s r m r r r r i T L dt T d i T L dt T d = − + + = − − + 1 1 在两相静止αβ坐标系上计算转子磁链时,即使系统达到稳态,由于电压、电 流和磁链均为正弦量,计算量大,程序复杂,对计算步长敏感
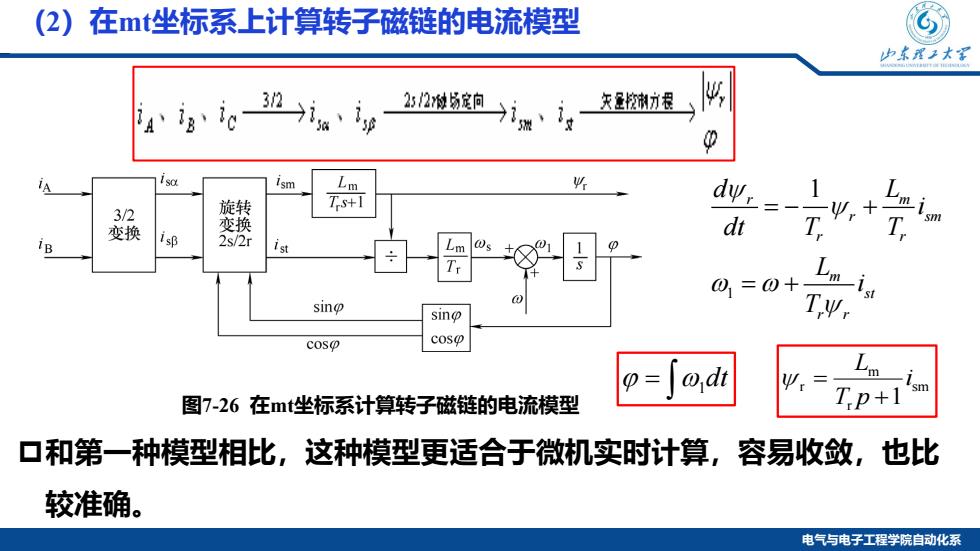
(2)在t坐标系上计算转子磁链的电流模型 少求理子大黑 232附场定向 东星物剂力程 Lm 1 旋转 Ts+1 3/2 变换 变换 2s/2r dt /B /sB 01=0+ sino Tw, coso p=∫o,d sm 图7-26在t坐标系计算转子磁链的电流模型 Tp+1 口和第一种模型相比,这种模型更适合于微机实时计算,容易收敛,也比 较准确。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 1 r 1 m r sm r r m st r r d L i dt T T L i T ψ ψ ω ω ψ =− + = + (2)在mt坐标系上计算转子磁链的电流模型 图7-26 在mt坐标系计算转子磁链的电流模型 和第一种模型相比,这种模型更适合于微机实时计算,容易收敛,也比 较准确。 dt ∫ ϕ = ω1 sm r m r 1 i T p L + ψ =

电流模型存在的问题 山东理子大写 口上述两种计算转子磁链的电流模型都需要实测的电流和转速信号, 不论转速高低时都能适用。 口受电动机参数变化的影响。 电动机温升和频率变化都会影响转子电 阻,磁饱和程度将影响电感。 口这些影响都将导致磁链幅值与位置信号失真,而反馈信号的失真必 然使磁链闭环控制系统的性能降低,这是电流模型的不足之处。 电气与电子工程学院自动化系
电气与电子工程学院自动化系 上述两种计算转子磁链的电流模型都需要实测的电流和转速信号, 不论转速高低时都能适用。 受电动机参数变化的影响。电动机温升和频率变化都会影响转子电 阻,磁饱和程度将影响电感。 这些影响都将导致磁链幅值与位置信号失真,而反馈信号的失真必 然使磁链闭环控制系统的性能降低,这是电流模型的不足之处。 电流模型存在的问题
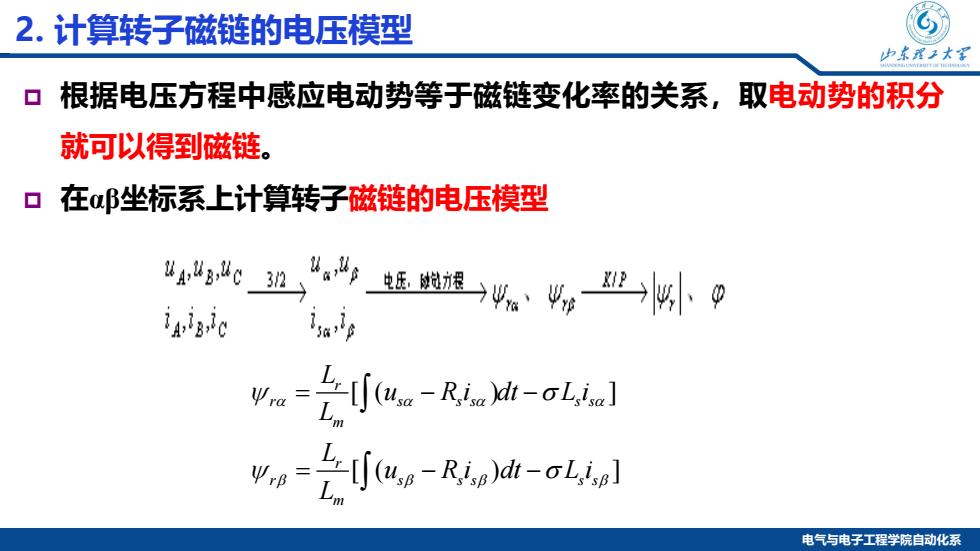
2.计算转子磁链的电压模型 也东理子太罩 口根据电压方程中感应电动势等于磁链变化率的关系,取电动势的积分 就可以得到磁链。 口在邱坐标系上计算转子磁链的电压模型 aguc 3n2 va-au-R.h-oil yn=2u。-Rwh-oe 电气与电子工程学院自动化系
电气与电子工程学院自动化系 根据电压方程中感应电动势等于磁链变化率的关系,取电动势的积分 就可以得到磁链。 在αβ坐标系上计算转子磁链的电压模型 [( ) ] [( ) ] r r s ss s s m r r s ss s s m L u R i dt L i L L u R i dt L i L α αα α β ββ β ψ σ ψ σ = −− = −− ∫ ∫ 2. 计算转子磁链的电压模型