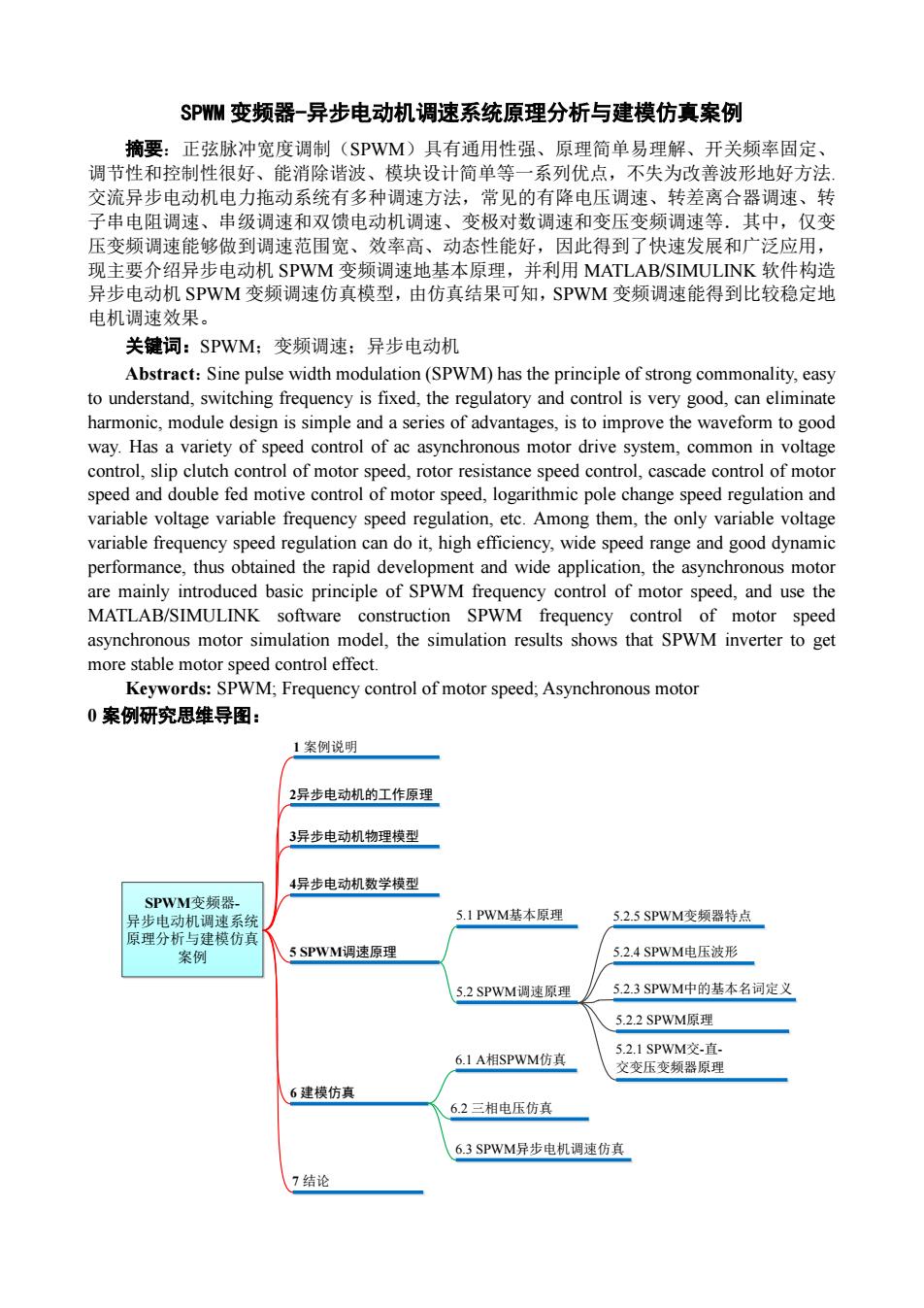
SPWM变频器-异步电动机调速系统原理分析与建模仿真案例 摘要:正弦脉冲宽度调制(SPWM)具有通用性强、原理简单易理解、开关频率固定 调节性和生性相 能消除谐波、模块设计简单等一系列优点,不失为改善波形地好方法 交流异步电动机电力拖动系统有多种调速方法,常见的有降电压调速、转差离合器调速、转 子串电阻调速、串级调速和双馈电动机调速、变极对数调速和变压变频调速等.其中,仅变 压变频调速能够做到调速范围宽、效率高、动态性能好,因此得到了快速发展和广泛应用, 现主要介绍异步电动机SPWM变频调速地基本原理,并利用MATLAB/SIMULINK软件构造 异步电动机SPWM变频调速仿真模型,由仿真结果可知,SPWM变频调速能得到比较稳定地 电机调速效果。 关键词:SPWM:变频调速:异步电动机 Abstract:Sine pulse width modulation(SPWM)has the principle of strong commonality,easy to understand,switching frequency is fixed,the regulatory and control is very good,can eliminate harmonic,module design is simple and a series of advantages,is to improve the waveform to good way.Has a variety of speed control of ac asynchronous motor drive system.common in voltage control,slip clutch con ol of motor speed,rotor resistanc espeed control,cascade control of moto s and double fed hmic pole change speed reg variable voltage variable frequency speed regulation,etc.Among them,the only variable voltage variable frequency speed regulation can do it,high efficiency,wide speed range and good dynamic performance,thus obtained the rapid development and wide application,the asynchronous motor are mainly introduced basic principle of SPWM frequency control of motor speed.and use the MATLAB/SIMULINK software onstruction SPWM fre control of motor speed asynchronous motor simulation model,the simulation results shows that SPWM inverter to get more stable motor speed control effect. Keywords:SPWM;Frequency control of motor speed;Asynchronous motor 0案例研究思维导图: 1案例说明 2异步电动机的工作原理 3异步电动机物理模型 4异步电动机数学模型 SPWM变频程 5IPWM基本原理 52.5SPWM变频器特点 例 5sPWM调速原理 524SPWM电压波形 5.2SPWM调速原理 5.23SPWM中的基本名词定义 5.22SPWM隙理 6.1A相SPWM仿真 交变压变颊器原理 6建模仿真 62三相电压仿真 6.3SPWM异步电机调速仿真 7结论
SPWM 变频器-异步电动机调速系统原理分析与建模仿真案例 摘要:正弦脉冲宽度调制(SPWM)具有通用性强、原理简单易理解、开关频率固定、 调节性和控制性很好、能消除谐波、模块设计简单等一系列优点,不失为改善波形地好方法. 交流异步电动机电力拖动系统有多种调速方法,常见的有降电压调速、转差离合器调速、转 子串电阻调速、串级调速和双馈电动机调速、变极对数调速和变压变频调速等.其中,仅变 压变频调速能够做到调速范围宽、效率高、动态性能好,因此得到了快速发展和广泛应用, 现主要介绍异步电动机 SPWM 变频调速地基本原理,并利用 MATLAB/SIMULINK 软件构造 异步电动机 SPWM 变频调速仿真模型,由仿真结果可知,SPWM 变频调速能得到比较稳定地 电机调速效果。 关键词:SPWM;变频调速;异步电动机 Abstract:Sine pulse width modulation (SPWM) has the principle of strong commonality, easy to understand, switching frequency is fixed, the regulatory and control is very good, can eliminate harmonic, module design is simple and a series of advantages, is to improve the waveform to good way. Has a variety of speed control of ac asynchronous motor drive system, common in voltage control, slip clutch control of motor speed, rotor resistance speed control, cascade control of motor speed and double fed motive control of motor speed, logarithmic pole change speed regulation and variable voltage variable frequency speed regulation, etc. Among them, the only variable voltage variable frequency speed regulation can do it, high efficiency, wide speed range and good dynamic performance, thus obtained the rapid development and wide application, the asynchronous motor are mainly introduced basic principle of SPWM frequency control of motor speed, and use the MATLAB/SIMULINK software construction SPWM frequency control of motor speed asynchronous motor simulation model, the simulation results shows that SPWM inverter to get more stable motor speed control effect. Keywords: SPWM; Frequency control of motor speed; Asynchronous motor 0 案例研究思维导图: SPWM变频器- 异步电动机调速系统 原理分析与建模仿真 案例 1 案例说明 2异步电动机的工作原理 6 建模仿真 5 SPWM调速原理 7 结论 5.1 PWM基本原理 5.2 SPWM调速原理 6.1 A相SPWM仿真 6.2 三相电压仿真 3异步电动机物理模型 4异步电动机数学模型 5.2.1 SPWM交-直- 交变压变频器原理 5.2.2 SPWM原理 5.2.3 SPWM中的基本名词定义 5.2.4 SPWM电压波形 5.2.5 SPWM变频器特点 6.3 SPWM异步电机调速仿真

1案例说明 异步电动机电力拖动系统有多种调速方法,常见的有降电压调速、转子串电阻调速、串 级调速、变极对数调速和变压变频调速等.其中,仅变压变频调速能够做到调速范围宽、效 率高、动态性能好,因此得到了快速发展和广泛应用,变压变频调速技术使同步电动机可以 应用到交流调速控制系统中,变压变频调速系统一般简称为变频调速系统,当采用变压变频 调速时转差功率不随转速变化,在采取一定的技术措施后能够实现高动态性能,使得交流调 速系统的性能可与直流调速系统相媲美。SPWM调速就是冲量相等而形状不同的窄脉冲加在 具有惯性的环节上时,其效果基本相同。用脉冲宽度按正弦规律变化而和正弦波等效的PWM 波形SPWM波形控制逆变电路中开关器件的通断,使其输出的脉冲电压的面积与所希望输出 的正弦波在相应区间内的面积相等,通过改变调制波的频率和幅值则可调节逆变电路输出电 压的频率和幅值。 2异步电动机的工作原理 当异步电动机定子回路的绕组连接三相交流电压源时,定子回路中产生三相对称电流, 从而在气隙中建立出基波旋转磁动势,并产生出基波旋转磁场,此时电动机的同步转速与电 网的频率成正比、与绕组的极对数成反比,具体计算公式为: n=g (1) 其中f为频率,p为极对数。 电动机工作的原理是上述过程产生的基波旋转磁场在短路的转子绕组中能感应电动势并 在产生在该磁场中的相应的电流,通入电流的转子绕组在磁场中会受到电磁力的作用,进而 在异步电动机中产生电磁转矩,使电动机的转子发生旋转,电动机就这样旋转起来。 异步电动机与旋转磁场的转动方向从始至终一直保持相同,而异步电动机内部接入的交 流电的相序确立了旋转磁场的方向。如果要使异步电动机改变其旋转方向,只需要变换其电 流相序即可,由此实现了电动机反转,具体做法是:只需调换电动机外部接通的任意两根电 源线。 转动速度n恒小于旋转磁场转动速度1,因为只有这样,才能在转子回路的绕组上出现 电磁转矩,才能使电动机发生旋转。如果n=1,那么转子回路的绕组与定子回路产生的磁 场就产生不了相对的旋转运动,那么转子回路的绕组中将不会有电动势的出现,可见n<1 是异步电动机工作的必要条件。由于实际的n与旋转磁场1的不一致,所以叫做异步电动机, 且因为其转子回路中的电动势以及电流是通过电磁感应作用而产生的,所以又叫做感应电动 机 3异步电动机物理模型 异步电动机物理模型如图1所示。其中A、B、C为位置固定的三相定子绕组轴线。a、b、 c为随转子旋转的三相转子绕组轴线,电度角日为两个坐标系之间的空间角度差
1 案例说明 异步电动机电力拖动系统有多种调速方法,常见的有降电压调速、转子串电阻调速、串 级调速、变极对数调速和变压变频调速等.其中,仅变压变频调速能够做到调速范围宽、效 率高、动态性能好,因此得到了快速发展和广泛应用,变压变频调速技术使同步电动机可以 应用到交流调速控制系统中.变压变频调速系统一般简称为变频调速系统,当采用变压变频 调速时转差功率不随转速变化,在采取一定的技术措施后能够实现高动态性能,使得交流调 速系统的性能可与直流调速系统相媲美。SPWM 调速就是冲量相等而形状不同的窄脉冲加在 具有惯性的环节上时,其效果基本相同。用脉冲宽度按正弦规律变化而和正弦波等效的 PWM 波形 SPWM 波形控制逆变电路中开关器件的通断,使其输出的脉冲电压的面积与所希望输出 的正弦波在相应区间内的面积相等,通过改变调制波的频率和幅值则可调节逆变电路输出电 压的频率和幅值。 2 异步电动机的工作原理 当异步电动机定子回路的绕组连接三相交流电压源时,定子回路中产生三相对称电流, 从而在气隙中建立出基波旋转磁动势,并产生出基波旋转磁场,此时电动机的同步转速与电 网的频率成正比、与绕组的极对数成反比,具体计算公式为: 𝑛𝑛 = 60𝑓𝑓 𝑝𝑝 (1) 其中 f 为频率,p 为极对数。 电动机工作的原理是上述过程产生的基波旋转磁场在短路的转子绕组中能感应电动势并 在产生在该磁场中的相应的电流,通入电流的转子绕组在磁场中会受到电磁力的作用,进而 在异步电动机中产生电磁转矩,使电动机的转子发生旋转,电动机就这样旋转起来。 异步电动机与旋转磁场的转动方向从始至终一直保持相同,而异步电动机内部接入的交 流电的相序确立了旋转磁场的方向。如果要使异步电动机改变其旋转方向,只需要变换其电 流相序即可,由此实现了电动机反转,具体做法是:只需调换电动机外部接通的任意两根电 源线。 转动速度 n 恒小于旋转磁场转动速度 n1,因为只有这样,才能在转子回路的绕组上出现 电磁转矩,才能使电动机发生旋转。如果 n=n1,那么转子回路的绕组与定子回路产生的磁 场就产生不了相对的旋转运动,那么转子回路的绕组中将不会有电动势的出现,可见n<n1 是异步电动机工作的必要条件。由于实际的 n 与旋转磁场 n1的不一致,所以叫做异步电动机, 且因为其转子回路中的电动势以及电流是通过电磁感应作用而产生的,所以又叫做感应电动 机。 3 异步电动机物理模型 异步电动机物理模型如图 1 所示。其中 A、B、C 为位置固定的三相定子绕组轴线。a、b、 c 为随转子旋转的三相转子绕组轴线,电度角θ为两个坐标系之间的空间角度差

图1三相异步电动机物理模型 4异步电动机数学模型 由于异步电动机本体结构使它的各种物理量存在如下特点: (1)转速、磁通是一个独立的输出变量。 (2)电压、电流、频率、转速、磁通之间会相互影响。 因此异步电动机动态的数学模型是一种具有高阶、非线性及多变量强耦合性的复杂系统 为使模型结构简单,做如下假设: (1)假设三相绕组为对称状态,空间上电角度互差120°,产生的磁动势沿气隙周围按照 正态分布。 (2)忽略磁路饱和,并假定各绕组的自感、互感恒定, (3)忽略铁屯、损耗。口 (4)不考虑频率、温度对绕姐电阻的影响。 异步电动机电压方程: 定子电压方程: ,R+@ A d, do (2) d e =lcRs+doc 转子折算到定子侧电压方程: ua=aR,+ 46=i6R,+0 (3) u=R+ 用矩阵形式进行表示:
图 1 三相异步电动机物理模型 4 异步电动机数学模型 由于异步电动机本体结构使它的各种物理量存在如下特点: (1)转速、磁通是一个独立的输出变量。 (2)电压、电流、频率、转速、磁通之间会相互影响。 因此异步电动机动态的数学模型是一种具有高阶、非线性及多变量强耦合性的复杂系统。 为使模型结构简单,做如下假设: (1)假设三相绕组为对称状态,空间上电角度互差 120°,产生的磁动势沿气隙周围按照 正态分布。 (2)忽略磁路饱和,并假定各绕组的自感、互感恒定。 (3)忽略铁屯、损耗。 (4)不考虑频率、温度对绕姐电阻的影响。 异步电动机电压方程: 定子电压方程: A A AS t B B BS t C C CS t d u iR d d u iR d d u iR d ∅ = + ∅ = + ∅ = + (2) 转子折算到定子侧电压方程: ⎩ ⎪ ⎨ ⎪ ⎧𝑢𝑢𝑎𝑎 = 𝑖𝑖𝑎𝑎𝑅𝑅𝑟𝑟 + 𝑑𝑑∅𝑎𝑎 𝑑𝑑𝑡𝑡 𝑢𝑢𝑏𝑏 = 𝑖𝑖𝑏𝑏𝑅𝑅𝑟𝑟 + 𝑑𝑑∅𝑏𝑏 𝑑𝑑𝑡𝑡 𝑢𝑢𝑐𝑐 = 𝑖𝑖𝑐𝑐𝑅𝑅𝑟𝑟 + 𝑑𝑑∅𝑐𝑐 𝑑𝑑𝑡𝑡 (3) 用矩阵形式进行表示:
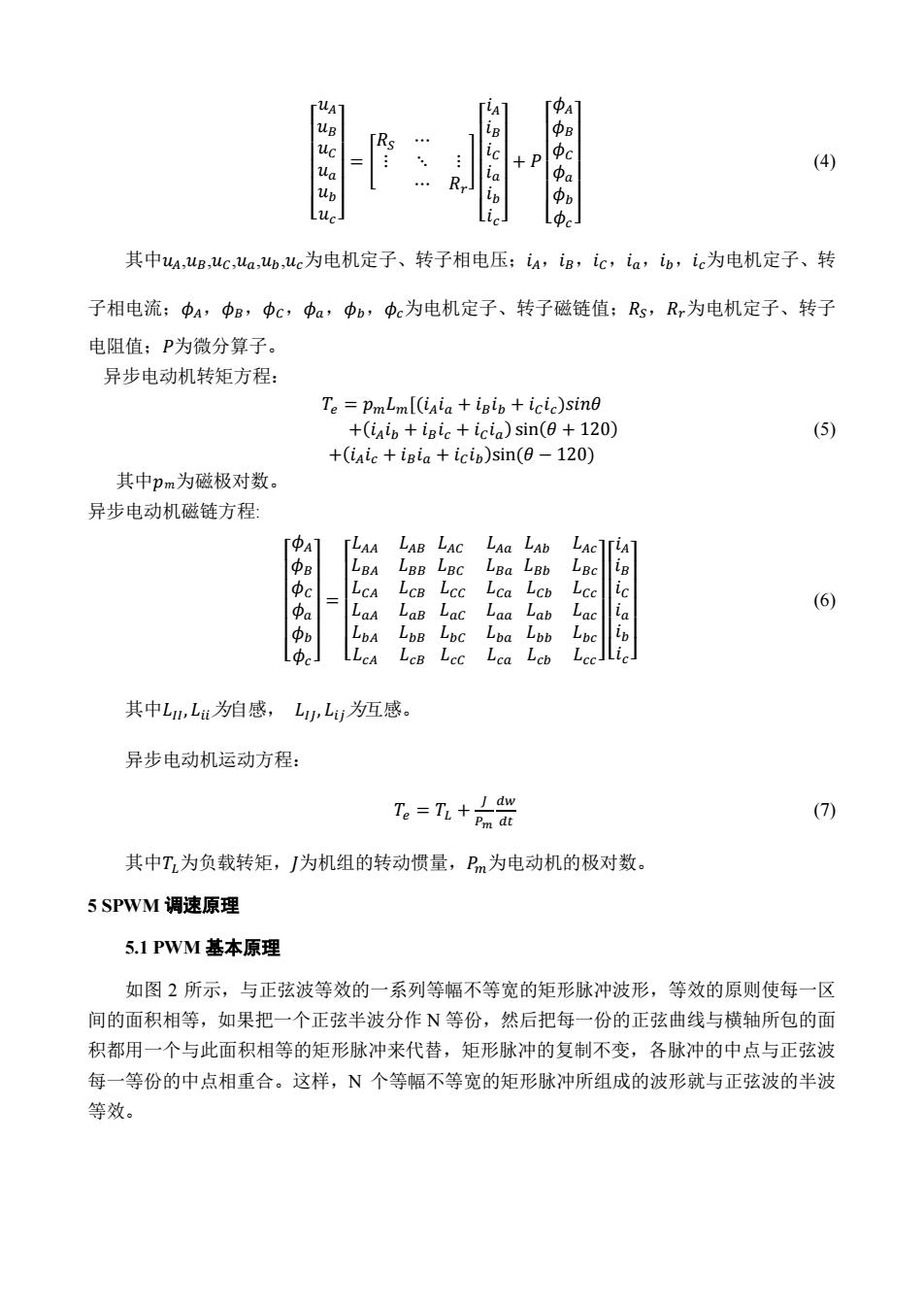
1 (4) R 其中,u,c,a,e为电机定子、转子相电压;,ig,ic,ia,ib,ie为电机定子、转 子相电流:中A,中B,中c,中a,中b,中为电机定子、转子磁链值:Rs,R为电机定子、转子 电阻值:P为微分算子。 异步电动机转矩方程: +(inib +inic icia)sin(@+120) (5) +(iaic igia icib)sin(0-120) 其中pm为磁极对数 异步电动机磁链方程 「LAA LAR LAC L88 Lec LBb Lcb 中a 臣 LaB Lac (6) Lob 其中L,Lm为自感,L,l为互感。 异步电动机运动方程: 无=九+大留 (7) 其中T为负载转矩,J为机组的转动惯量,Bm为电动机的极对数。 5SPWM调速原理 5.1PWM基本原理 如图2所示,与正弦波等效的一系列等幅不等宽的矩形脉冲波形,等效的原则使每一区 间的面积相等,如果把一个正弦半波分作N等份,然后把每一份的正弦曲线与横轴所包的面 积都用一个与此面积相等的矩形脉冲来代替,矩形脉冲的复制不变,各脉冲的中点与正弦波 每一等份的中点相重合。这样,N个等幅不等宽的矩形脉冲所组成的波形就与正弦波的半波 等效
⎣ ⎢ ⎢ ⎢ ⎢ ⎡ 𝑢𝑢𝐴𝐴 𝑢𝑢𝐵𝐵 𝑢𝑢𝐶𝐶 𝑢𝑢𝑎𝑎 𝑢𝑢𝑏𝑏 𝑢𝑢𝑐𝑐 ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ = � 𝑅𝑅𝑆𝑆 ⋯ ⋮ ⋱ ⋮ ⋯ 𝑅𝑅𝑟𝑟 � ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ 𝑖𝑖𝐴𝐴 𝑖𝑖𝐵𝐵 𝑖𝑖𝐶𝐶 𝑖𝑖𝑎𝑎 𝑖𝑖𝑏𝑏 𝑖𝑖𝑐𝑐 ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ + 𝑃𝑃 ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ 𝜙𝜙𝐴𝐴 𝜙𝜙𝐵𝐵 𝜙𝜙𝐶𝐶 𝜙𝜙𝑎𝑎 𝜙𝜙𝑏𝑏 𝜙𝜙𝑐𝑐 ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ (4) 其中𝑢𝑢𝐴𝐴,𝑢𝑢𝐵𝐵,𝑢𝑢𝐶𝐶,𝑢𝑢𝑎𝑎,𝑢𝑢𝑏𝑏,𝑢𝑢𝑐𝑐为电机定子、转子相电压;𝑖𝑖𝐴𝐴,𝑖𝑖𝐵𝐵,𝑖𝑖𝐶𝐶,𝑖𝑖𝑎𝑎,𝑖𝑖𝑏𝑏,𝑖𝑖𝑐𝑐为电机定子、转 子相电流;𝜙𝜙𝐴𝐴,𝜙𝜙𝐵𝐵,𝜙𝜙𝐶𝐶,𝜙𝜙𝑎𝑎,𝜙𝜙𝑏𝑏,𝜙𝜙𝑐𝑐为电机定子、转子磁链值;𝑅𝑅𝑆𝑆,𝑅𝑅𝑟𝑟为电机定子、转子 电阻值;𝑃𝑃为微分算子。 异步电动机转矩方程: 𝑇𝑇𝑒𝑒 = 𝑝𝑝𝑚𝑚𝐿𝐿𝑚𝑚[(𝑖𝑖𝐴𝐴𝑖𝑖𝑎𝑎 + 𝑖𝑖𝐵𝐵𝑖𝑖𝑏𝑏 + 𝑖𝑖𝐶𝐶𝑖𝑖𝑐𝑐)𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 +(𝑖𝑖𝐴𝐴𝑖𝑖𝑏𝑏 + 𝑖𝑖𝐵𝐵𝑖𝑖𝑐𝑐 + 𝑖𝑖𝐶𝐶𝑖𝑖𝑎𝑎) sin(𝜃𝜃 + 120) (5) +(𝑖𝑖𝐴𝐴𝑖𝑖𝑐𝑐 + 𝑖𝑖𝐵𝐵𝑖𝑖𝑎𝑎 + 𝑖𝑖𝐶𝐶𝑖𝑖𝑏𝑏)sin(𝜃𝜃 − 120) 其中𝑝𝑝𝑚𝑚为磁极对数。 异步电动机磁链方程: ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ 𝜙𝜙𝐴𝐴 𝜙𝜙𝐵𝐵 𝜙𝜙𝐶𝐶 𝜙𝜙𝑎𝑎 𝜙𝜙𝑏𝑏 𝜙𝜙𝑐𝑐 ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ 𝐿𝐿𝐴𝐴𝐴𝐴 𝐿𝐿𝐴𝐴𝐴𝐴 𝐿𝐿𝐵𝐵𝐵𝐵 𝐿𝐿𝐶𝐶𝐶𝐶 𝐿𝐿𝑎𝑎𝑎𝑎 𝐿𝐿𝑏𝑏𝑏𝑏 𝐿𝐿𝑐𝑐𝑐𝑐 𝐿𝐿𝐵𝐵𝐵𝐵 𝐿𝐿𝐶𝐶𝐶𝐶 𝐿𝐿𝑎𝑎𝑎𝑎 𝐿𝐿𝑏𝑏𝑏𝑏 𝐿𝐿𝑐𝑐𝑐𝑐 𝐿𝐿𝐴𝐴𝐴𝐴 𝐿𝐿𝐴𝐴𝐴𝐴 𝐿𝐿𝐵𝐵𝐵𝐵 𝐿𝐿𝐵𝐵𝐵𝐵 𝐿𝐿𝐶𝐶𝐶𝐶 𝐿𝐿𝑎𝑎𝑎𝑎 𝐿𝐿𝑏𝑏𝑏𝑏 𝐿𝐿𝑐𝑐𝑐𝑐 𝐿𝐿𝐶𝐶𝐶𝐶 𝐿𝐿𝑎𝑎𝑎𝑎 𝐿𝐿𝑏𝑏𝑏𝑏 𝐿𝐿𝑐𝑐𝑐𝑐 𝐿𝐿𝐴𝐴𝐴𝐴 𝐿𝐿𝐴𝐴𝐴𝐴 𝐿𝐿𝐵𝐵𝐵𝐵 𝐿𝐿𝐵𝐵𝐵𝐵 𝐿𝐿𝐶𝐶𝐶𝐶 𝐿𝐿𝑎𝑎𝑎𝑎 𝐿𝐿𝑏𝑏𝑏𝑏 𝐿𝐿𝑐𝑐𝑐𝑐 𝐿𝐿𝐶𝐶𝐶𝐶 𝐿𝐿𝑎𝑎𝑎𝑎 𝐿𝐿𝑏𝑏𝑏𝑏 𝐿𝐿𝑐𝑐𝑐𝑐 ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ 𝑖𝑖𝐴𝐴 𝑖𝑖𝐵𝐵 𝑖𝑖𝐶𝐶 𝑖𝑖𝑎𝑎 𝑖𝑖𝑏𝑏 𝑖𝑖𝑐𝑐 ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ (6) 其中𝐿𝐿𝐼𝐼𝐼𝐼, 𝐿𝐿𝑖𝑖𝑖𝑖为自感, 𝐿𝐿𝐼𝐼𝐼𝐼, 𝐿𝐿𝑖𝑖𝑖𝑖为互感。 异步电动机运动方程: 𝑇𝑇𝑒𝑒 = 𝑇𝑇𝐿𝐿 + 𝐽𝐽 𝑃𝑃𝑚𝑚 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 (7) 其中𝑇𝑇𝐿𝐿为负载转矩,𝐽𝐽为机组的转动惯量,𝑃𝑃𝑚𝑚为电动机的极对数。 5 SPWM 调速原理 5.1 PWM 基本原理 如图 2 所示,与正弦波等效的一系列等幅不等宽的矩形脉冲波形,等效的原则使每一区 间的面积相等,如果把一个正弦半波分作 N 等份,然后把每一份的正弦曲线与横轴所包的面 积都用一个与此面积相等的矩形脉冲来代替,矩形脉冲的复制不变,各脉冲的中点与正弦波 每一等份的中点相重合。这样,N 个等幅不等宽的矩形脉冲所组成的波形就与正弦波的半波 等效
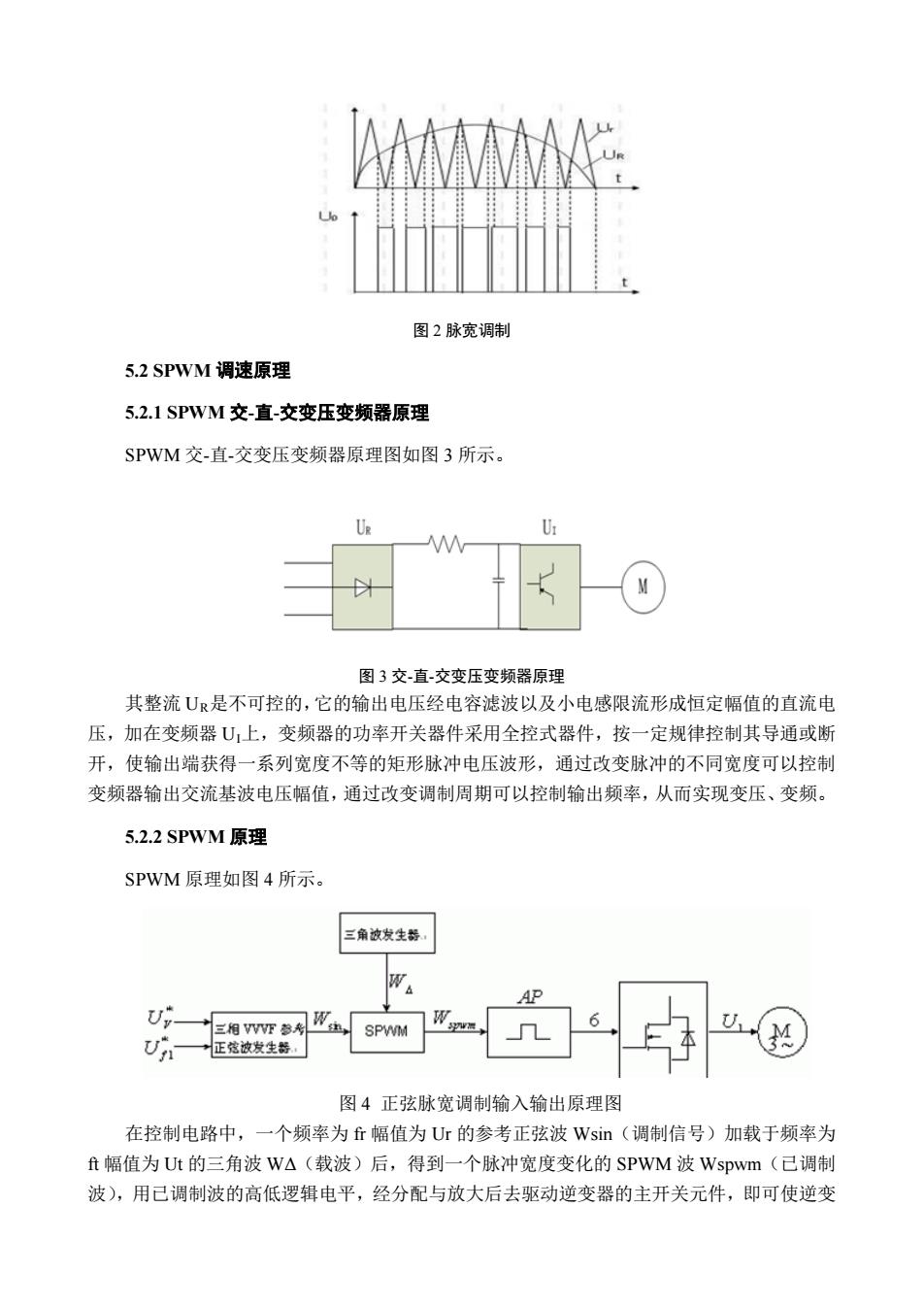
图2脉宽调制 5.2SPWM调速原理 5.2.1SPWM交-直-交变压变频器原理 SPWM交-直-交变压变频器原理图如图3所示。 图3交直交变压变频器原理 其整流U是不可控的,它的输出电压经电容滤波以及小电感限流形成恒定幅值的直流电 压,加在变频器U上,变频器的功率开关器件采用全控式器件,按一定规律控制其导通或断 开,使输出端获得一系列宽度不等的矩形脉冲电压波形,通过改变脉冲的不同宽度可以控制 变频器输出交流基波电压幅值,通过改变调制周期可以控制输出频率,从而实现变压、变频。 5.2.2SPWM原理 SPWM原理如图4所示 三角波发生器 U 图4正弦脉宽调制输入输出原理图 在控制电路中,一个频率为f丘幅值为Ur的参考正弦波Wsi(调制信号)加载于频率为 A幅值为Ut的三角波W△(载波)后,得到一个脉冲宽度变化的SPWM波Wspwm(已调制 波),用己调制波的高低逻辑电平,经分配与放大后去驱动逆变器的主开关元件,即可使逆变
图 2 脉宽调制 5.2 SPWM 调速原理 5.2.1 SPWM 交-直-交变压变频器原理 SPWM 交-直-交变压变频器原理图如图 3 所示。 图 3 交-直-交变压变频器原理 其整流 UR是不可控的,它的输出电压经电容滤波以及小电感限流形成恒定幅值的直流电 压,加在变频器 UI上,变频器的功率开关器件采用全控式器件,按一定规律控制其导通或断 开,使输出端获得一系列宽度不等的矩形脉冲电压波形,通过改变脉冲的不同宽度可以控制 变频器输出交流基波电压幅值,通过改变调制周期可以控制输出频率,从而实现变压、变频。 5.2.2 SPWM 原理 SPWM 原理如图 4 所示。 图 4 正弦脉宽调制输入输出原理图 在控制电路中,一个频率为 fr 幅值为 Ur 的参考正弦波 Wsin(调制信号)加载于频率为 ft 幅值为 Ut 的三角波 WΔ(载波)后,得到一个脉冲宽度变化的 SPWM 波 Wspwm(已调制 波),用已调制波的高低逻辑电平,经分配与放大后去驱动逆变器的主开关元件,即可使逆变