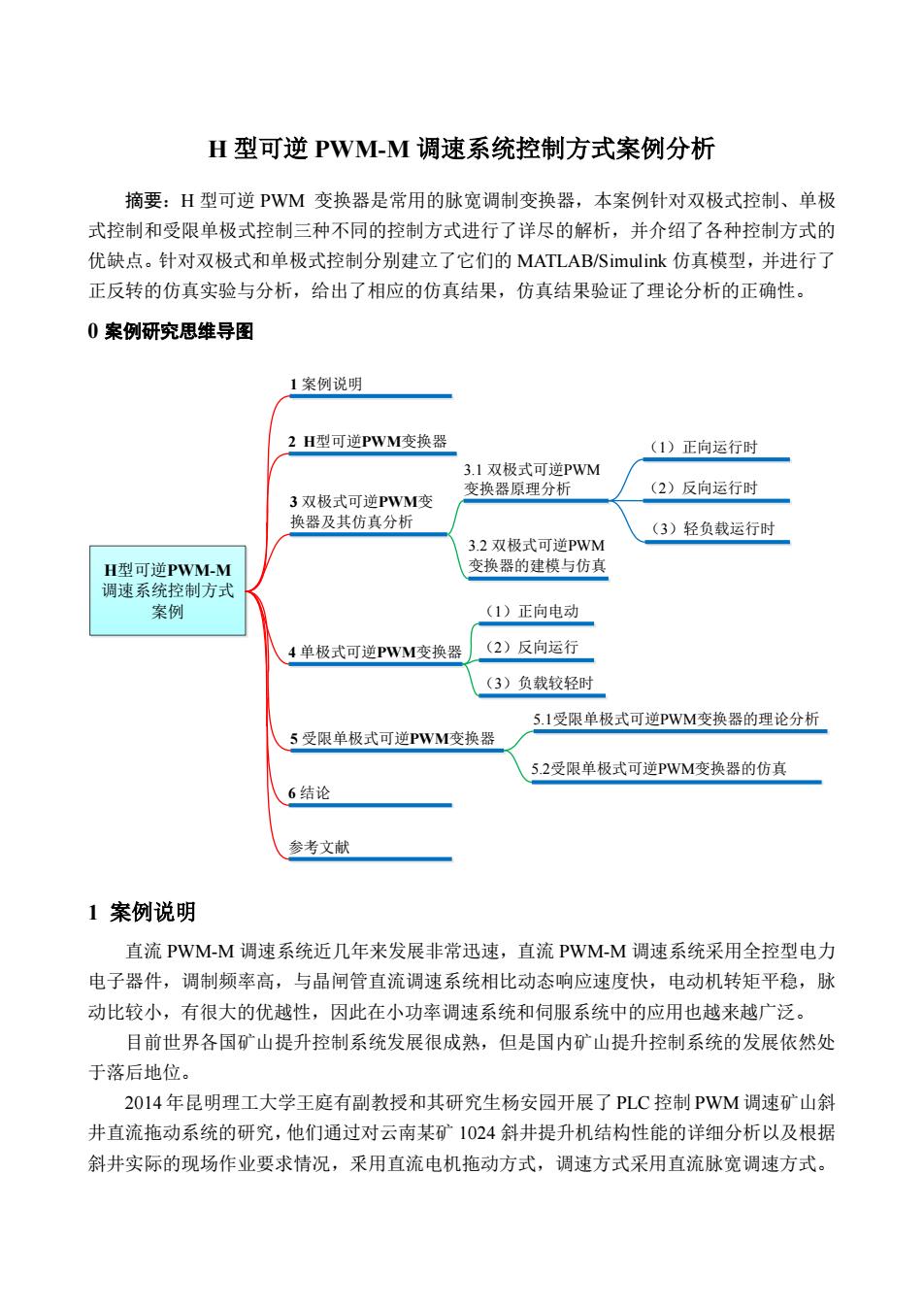
H型可逆PWM-M调速系统控制方式案例分析 摘要:H型可逆PWM变换器是常用的脉宽调制变换器,本案例针对双极式控制、单极 式控制和受限单极式控制三种不同的控制方式进行了详尽的解析,并介绍了各种控制方式的 优缺点。针对双极式和单极式控制分别建立了它们的MATLAB/Simulink仿真模型,并进行了 正反转的仿真实验与分析,给出了相应的仿真结果,仿真结果验证了理论分析的正确性。 0案例研究思维导图 1案例说明 2H型可逆PWM变换器 (1)正向运行时 3.1双极式可逆PWM 变换器原理分折 (2)反向运行时 3双极式可逆PwM 换器及其仿真分析 (3)轻负载运行时 3.2双极式可逆PWM H型可逆PVMM 变换器的建模与仿真 调速系统控制方式 案例 (1)正向电动 4单极式可逆PWM变换器 (2)反向运行 (3)负载较轻时 5.1受限单极式可逆PWM变换器的理论分析 5受限单极式可逆PWM变换器 52受限单极式可逆PWM变换器的仿真 6结论 参考文献 1案例说明 直流PWM-M调速系统近几年来发展非常迅速,直流PWM-M调速系统采用全控型电力 电子器件,调制频率高,与品闸管直流调速系统相比动态响应速度快,电动机转矩平稳,脉 动比较小,有很大的优越性,因此在小功率调速系统和伺服系统中的应用也越来越广泛。 目前世界各国矿山提升控制系统发展很成熟,但是国内矿山提升控制系统的发展依然处 于落后地位。 2014年昆明理工大学王庭有副教授和其研究生杨安园开展了PLC控制PWM调速矿山斜 井直流拖动系统的研究,他们通过对云南某矿1024斜井提升机结构性能的详细分析以及根据 斜井实际的现场作业要求情况,采用直流电机拖动方式,调速方式采用直流脉宽调速方式
H 型可逆 PWM-M 调速系统控制方式案例分析 摘要:H 型可逆 PWM 变换器是常用的脉宽调制变换器,本案例针对双极式控制、单极 式控制和受限单极式控制三种不同的控制方式进行了详尽的解析,并介绍了各种控制方式的 优缺点。针对双极式和单极式控制分别建立了它们的 MATLAB/Simulink 仿真模型,并进行了 正反转的仿真实验与分析,给出了相应的仿真结果,仿真结果验证了理论分析的正确性。 0 案例研究思维导图 H型可逆PWM-M 调速系统控制方式 案例 1 案例说明 2 H型可逆PWM变换器 4 单极式可逆PWM变换器 3.2 双极式可逆PWM 变换器的建模与仿真 3.1 双极式可逆PWM 变换器原理分析 3 双极式可逆PWM变 换器及其仿真分析 (1)正向运行时 (2)反向运行时 (3)轻负载运行时 (1)正向电动 (2)反向运行 (3)负载较轻时 5 受限单极式可逆PWM变换器 5.1受限单极式可逆PWM变换器的理论分析 5.2受限单极式可逆PWM变换器的仿真 6 结论 参考文献 1 案例说明 直流 PWM-M 调速系统近几年来发展非常迅速,直流 PWM-M 调速系统采用全控型电力 电子器件,调制频率高,与晶闸管直流调速系统相比动态响应速度快,电动机转矩平稳,脉 动比较小,有很大的优越性,因此在小功率调速系统和伺服系统中的应用也越来越广泛。 目前世界各国矿山提升控制系统发展很成熟,但是国内矿山提升控制系统的发展依然处 于落后地位。 2014 年昆明理工大学王庭有副教授和其研究生杨安园开展了 PLC 控制 PWM 调速矿山斜 井直流拖动系统的研究,他们通过对云南某矿 1024 斜井提升机结构性能的详细分析以及根据 斜井实际的现场作业要求情况,釆用直流电机拖动方式,调速方式采用直流脉宽调速方式

他们进行了基于直流电机直流脉宽调速系统的设计,应用西门子S7-30OLC对直流电机实现 了调谏控制。 云南某矿1024斜井绞车系统主要由主轴装置、制动器、减速机、电动机、操作台、测速 电机、液压站和齿轮联轴器组成。1024斜井中绞车型号为T25M200/1020,电机型号为 R162-8,额定功率为155KW,额定电压为380V,额定电流为312A,斜井长度367m,斜度 25°最大绳速3.77ms,最大净张力3t。1024斜井绞车的总控制系统结构图如图0所示。 打印机 电源 码器⊙ 现场信号 图01024斜井纹车的总控制系统结构图 图0中的PWM驱动单元和电机构成直流PWM-M调速系统。直流PWM-M调速系统的 PWM变换器有可逆和不可逆两类,可逆PWM变换器的控制方式又有双极式、单极式和受限 单极式等多种形式。在全国各高校选用的诸多经典教材中,无论是《电力电子技术》还是《运 动控制系统》,他们一般只简单介绍双极式控制,很少涉及到单极式和受限单极式的介绍,但 是在对调速性能要求较高且又考虑节能时,往往以选择单极式控制方式为好。因此,本案例 着重研究H型可逆PWM变换器的三种控制方式,并对双极式和受限单极式PWM-M调速系 统进行MATLAB的建模与仿真验证,通过仿真过程让读者熟悉直流PWMM可逆调速系统 的工作过程。 2H型可逆PWM变换器 直流PWMM调速系统的主电路如图1所示,主电路由4个电力场效应管VT1、VT2、 VT3、VT4和4个续流二极管VD1、VD2、VD3、VD4成H型连接组成。当开关管VT1和 VT4导通时,有正向电流1(沿“+Us一VT1一→M一VT4一地”方向)通过电动机M,电动机 正转。当开关管VT2和VT3导通时,有反向电流2(沿“+Us一VT3一M一VT2→地”方向)
他们进行了基于直流电机直流脉宽调速系统的设计,应用西门子 S7-300PLC 对直流电机实现 了调速控制。 云南某矿 1024 斜井绞车系统主要由主轴装置、制动器、减速机、电动机、操作台、测速 电机、液压站和齿轮联轴器组成。1024 斜井中绞车型号为 JT25M 200/1020,电机型号为 JR162-8,额定功率为 155KW,额定电压为 380V,额定电流为 312A,斜井长度 367m,斜度 25°最大绳速 3.77m/s,最大净张力 3t。1024 斜井绞车的总控制系统结构图如图 0 所示。 图 0 1024 斜井绞车的总控制系统结构图 图 0 中的 PWM 驱动单元和电机构成直流 PWM-M 调速系统。直流 PWM-M 调速系统的 PWM 变换器有可逆和不可逆两类,可逆 PWM 变换器的控制方式又有双极式、单极式和受限 单极式等多种形式。在全国各高校选用的诸多经典教材中,无论是《电力电子技术》还是《运 动控制系统》,他们一般只简单介绍双极式控制,很少涉及到单极式和受限单极式的介绍,但 是在对调速性能要求较高且又考虑节能时, 往往以选择单极式控制方式为好。因此,本案例 着重研究 H 型可逆 PWM 变换器的三种控制方式,并对双极式和受限单极式 PWM-M 调速系 统进行 MATLAB 的建模与仿真验证,通过仿真过程让读者熟悉直流 PWM-M 可逆调速系统 的工作过程。 2 H 型可逆 PWM 变换器 直流 PWM-M 调速系统的主电路如图 1 所示,主电路由 4 个电力场效应管 VT1、VT2、 VT3、VT4 和 4 个续流二极管 VD1、VD2、VD3、VD4 成 H 型连接组成。当开关管 VT1 和 VT4 导通时,有正向电流 i1(沿“+US→VT1→M→VT4→地”方向)通过电动机 M,电动机 正转。当开关管 VT2 和 VT3 导通时,有反向电流 i2(沿“+US→VT3→M→VT2→地”方向)
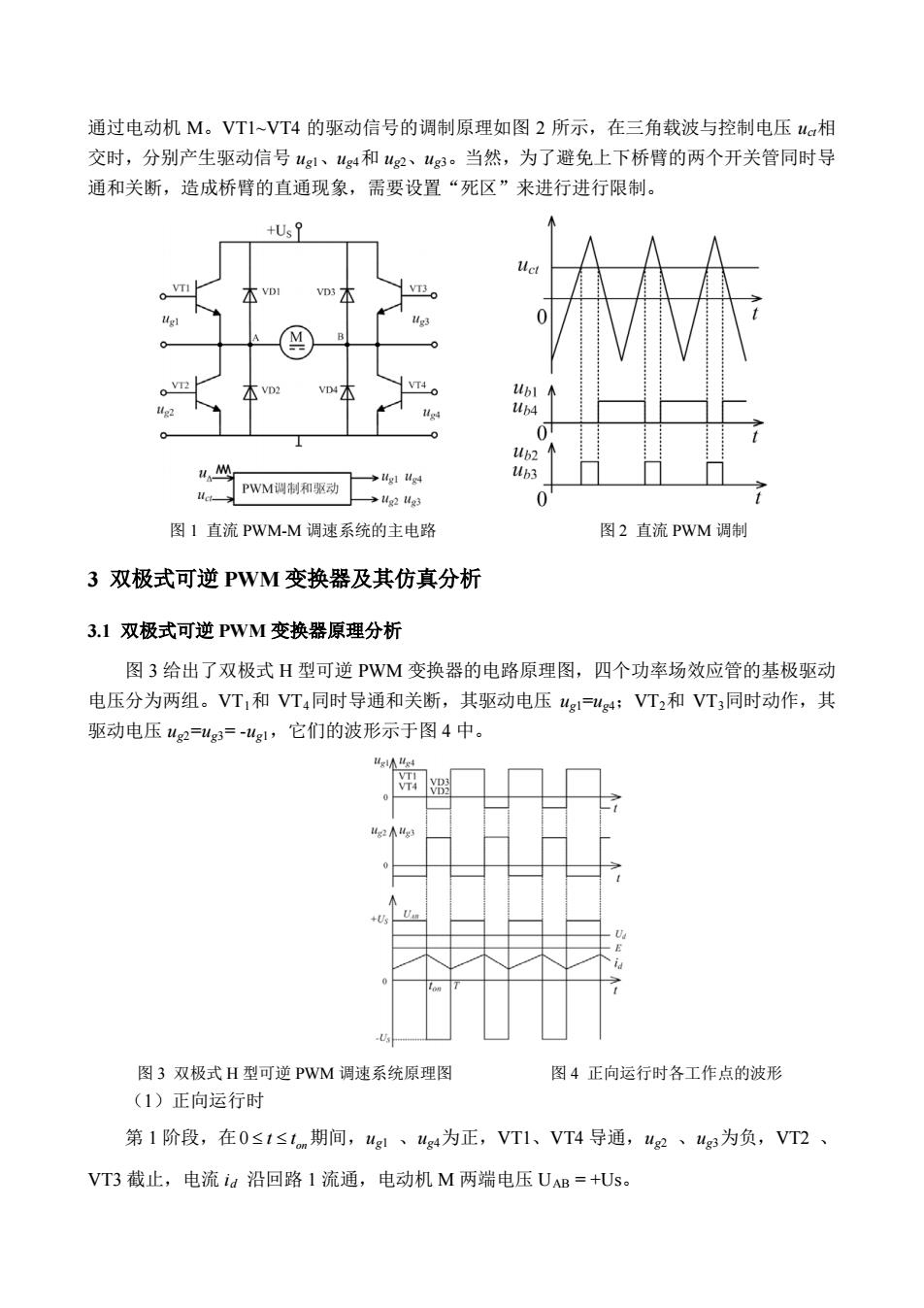
通过电动机M。VT1~VT4的驱动信号的调制原理如图2所示,在三角载波与控制电压u相 交时,分别产生驱动信号g1、4g4和4g2、g3。当然,为了避免上下桥臂的两个开关管同时导 通和关断,造成桥臂的直通现象,需要设置“死区”来进行进行限制。 +Us? PwM调制和驱动 →ge 图1直流PWM-M调速系统的主电路 图2直流PWM调制 3双极式可逆PWM变换器及其仿真分析 3.1双极式可逆PWM变换器原理分析 图3给出了双极式H型可逆PWM变换器的电路原理图,四个功率场效应管的基极驱动 电压分为两组。VT和VT:同时导通和关断,其驱动电压“g1=u4:VT,和VT3同时动作,其 驱动电压u2=e=-山g1,它们的波形示于图4中。 图3双极式H型可逆PWM调速系统原理图 图4正向运行时各工作点的波形 (1)正向运行时 第1阶段,在0≤1≤1n期间,4g1、e4为正,VT1、VT4导通,2、g3为负,VT2 VT3截止,电流ia沿回路1流通,电动机M两端电压UAB=+Us
通过电动机 M。VT1~VT4 的驱动信号的调制原理如图 2 所示,在三角载波与控制电压 uct相 交时,分别产生驱动信号 ug1、ug4和 ug2、ug3。当然,为了避免上下桥臂的两个开关管同时导 通和关断,造成桥臂的直通现象,需要设置“死区”来进行进行限制。 图 1 直流 PWM-M 调速系统的主电路 图 2 直流 PWM 调制 3 双极式可逆 PWM 变换器及其仿真分析 3.1 双极式可逆 PWM 变换器原理分析 图 3 给出了双极式 H 型可逆 PWM 变换器的电路原理图,四个功率场效应管的基极驱动 电压分为两组。VT1和 VT4同时导通和关断,其驱动电压 ug1=ug4;VT2和 VT3同时动作,其 驱动电压 ug2=ug3= -ug1,它们的波形示于图 4 中。 图 3 双极式 H 型可逆 PWM 调速系统原理图 图 4 正向运行时各工作点的波形 (1)正向运行时 第 1 阶段,在0 on ≤ ≤t t 期间,ug1 、ug4为正,VT1、VT4 导通,ug2 、ug3为负,VT2 、 VT3 截止,电流 id 沿回路 1 流通,电动机 M 两端电压 UAB = +Us
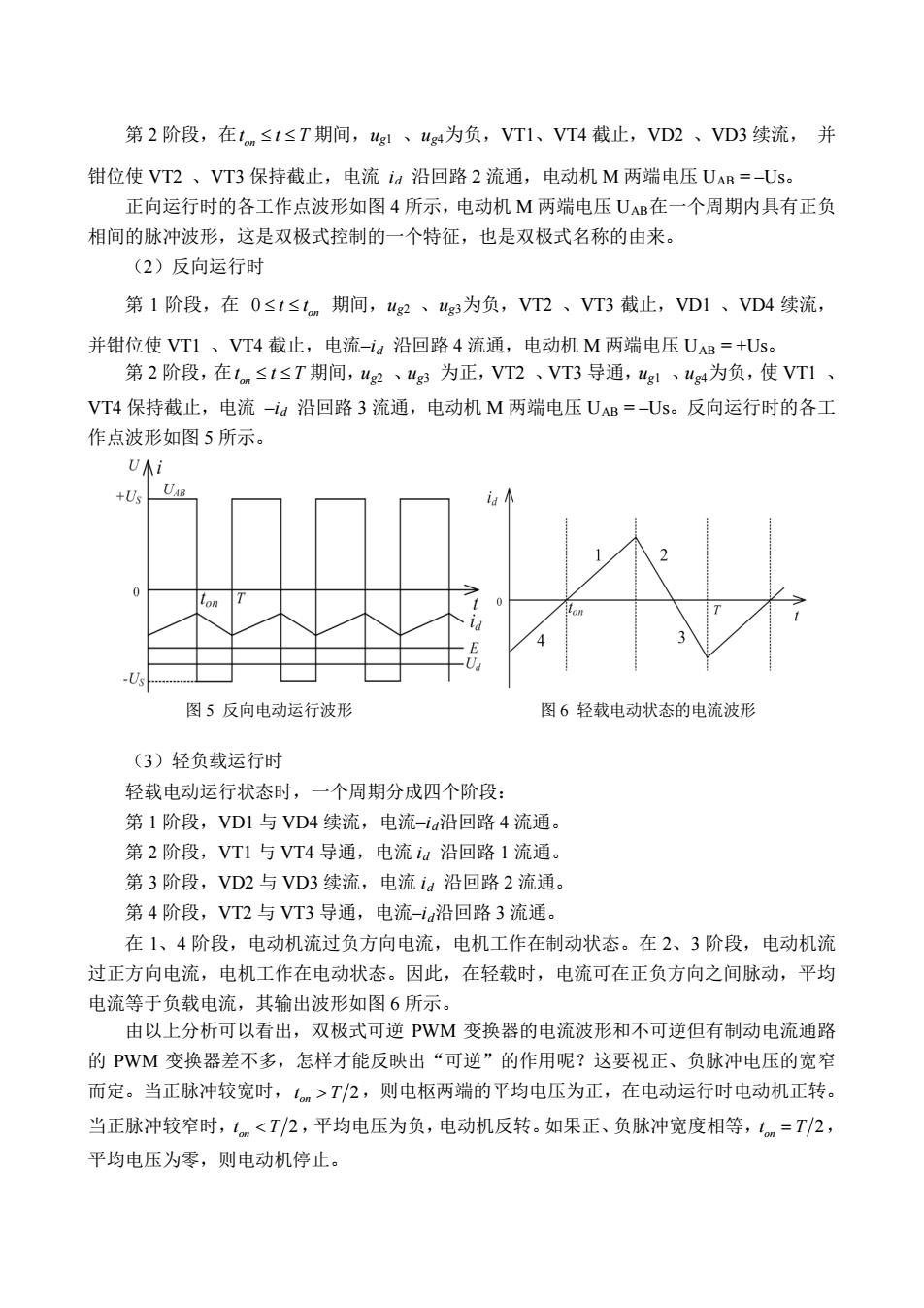
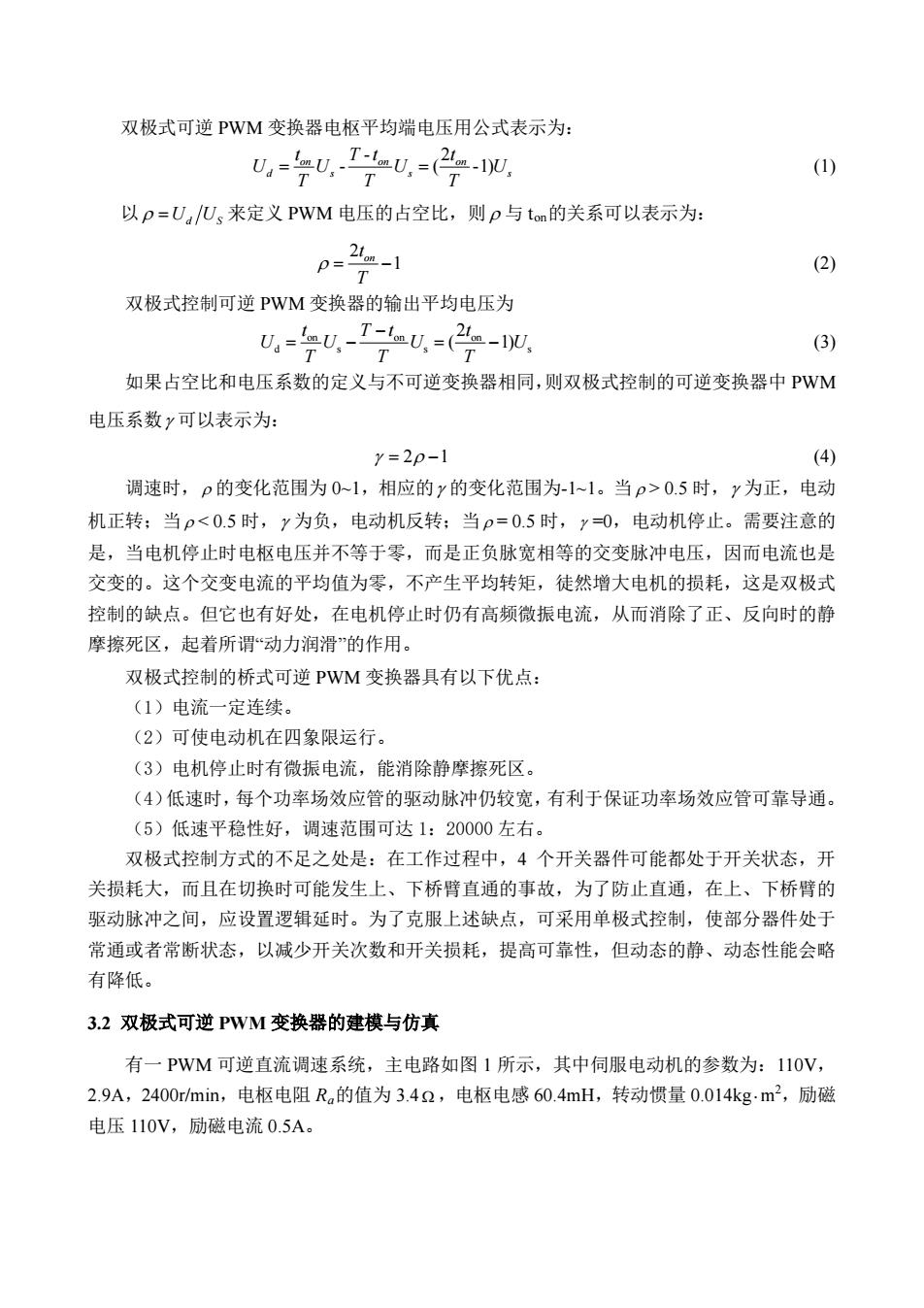
第2阶段,在1m≤1sT期间,4g1、ug4为负,VT1、VT4截止,VD2、VD3续流,并 钳位使VT2、VT3保持截止,电流ia沿回路2流通,电动机M两端电压UB=-Us。 正向运行时的各工作点波形如图4所示,电动机M两端电压UB在一个周期内具有正负 相间的脉冲波形,这是双极式控制的一个特征,也是双极式名称的由来。 (2)反向运行时 第1阶段,在0≤1≤1m期间,g2、4g为负,VT2、VT3截止,VD1、VD4续流 并钳位使VT1、VT4截止,电流-1a沿回路4流通,电动机M两端电压UAg=+Us。 第2阶段,在1≤1≤T期间,4g2、4g3为正,VT2、VT3导通,4g1、”g4为负,使VT1 VT4保持截止,电流-ia沿回路3流通,电动机M两端电压UB=-Us。反向运行时的各工 作点波形如图5所示。 UAi -U5 图5反向电动运行波形 图6轻载电动状态的电流波形 (3)轻负载运行时 轻载电动运行状态时,一个周期分成四个阶段: 第1阶段,VD1与VD4续流,电流-i沿回路4流通。 第2阶段,VT1与VT4导通,电流ia沿回路1流通。 第3阶段,VD2与VD3续流,电流ia沿回路2流通。 第4阶段,VT2与VT3导通,电流-i沿回路3流通。 在1、4阶段,电动机流过负方向电流,电机工作在制动状态。在2、3阶段,电动机流 过正方向电流,电机工作在电动状态。因此,在轻载时,电流可在正负方向之间脉动,平均 电流等于负载电流,其输出波形如图6所示。 由以上分析可以看出,双极式可逆PWM变换器的电流波形和不可逆但有制动电流通路 的PWM变换器差不多,怎样才能反映出“可逆”的作用呢?这要视正、负脉冲电压的宽窄 而定。当正脉冲较宽时,1m>T/2,则电枢两端的平均电压为正,在电动运行时电动机正转。 当正脉冲较窄时,1<T2,平均电压为负,电动机反转。如果正、负脉冲宽度相等,tm=T/2 平均电压为零,则电动机停止
第 2 阶段,在 on t tT ≤ ≤ 期间,ug1 、ug4为负,VT1、VT4 截止,VD2 、VD3 续流, 并 钳位使 VT2 、VT3 保持截止,电流 id 沿回路 2 流通,电动机 M 两端电压 UAB = –Us。 正向运行时的各工作点波形如图 4 所示,电动机 M 两端电压 UAB在一个周期内具有正负 相间的脉冲波形,这是双极式控制的一个特征,也是双极式名称的由来。 (2)反向运行时 第 1 阶段,在 0 on ≤ ≤t t 期间,ug2 、ug3为负,VT2 、VT3 截止,VD1 、VD4 续流, 并钳位使 VT1 、VT4 截止,电流–id 沿回路 4 流通,电动机 M 两端电压 UAB = +Us。 第 2 阶段,在 on t tT ≤ ≤ 期间,ug2 、ug3 为正,VT2 、VT3 导通,ug1 、ug4为负,使 VT1 、 VT4 保持截止,电流 –id 沿回路 3 流通,电动机 M 两端电压 UAB = –Us。反向运行时的各工 作点波形如图 5 所示。 图 5 反向电动运行波形 图 6 轻载电动状态的电流波形 (3)轻负载运行时 轻载电动运行状态时,一个周期分成四个阶段: 第 1 阶段,VD1 与 VD4 续流,电流–id沿回路 4 流通。 第 2 阶段,VT1 与 VT4 导通,电流 id 沿回路 1 流通。 第 3 阶段,VD2 与 VD3 续流,电流 id 沿回路 2 流通。 第 4 阶段,VT2 与 VT3 导通,电流–id沿回路 3 流通。 在 1、4 阶段,电动机流过负方向电流,电机工作在制动状态。在 2、3 阶段,电动机流 过正方向电流,电机工作在电动状态。因此,在轻载时,电流可在正负方向之间脉动,平均 电流等于负载电流,其输出波形如图 6 所示。 由以上分析可以看出,双极式可逆 PWM 变换器的电流波形和不可逆但有制动电流通路 的 PWM 变换器差不多,怎样才能反映出“可逆”的作用呢?这要视正、负脉冲电压的宽窄 而定。当正脉冲较宽时, 2 on t T > ,则电枢两端的平均电压为正,在电动运行时电动机正转。 当正脉冲较窄时, 2 on t T < ,平均电压为负,电动机反转。如果正、负脉冲宽度相等, 2 on t T = , 平均电压为零,则电动机停止
双极式可逆PWM变换器电枢平均端电压用公式表示为: %=UTU,=0, 1) 以p=U,/U、来定义PwM电压的占空比,则p与tm的关系可以表示为: p=2-1 (2) 双极式控制可逆PWM变换器的输出平均电压为 U=U-U,=-0, (3) 如果占空比和电压系数的定义与不可逆变换器相同,则双极式控制的可逆变换器中PWM 电压系数y可以表示为: y=2p-1 (4) 调速时,p的变化范围为0-1,相应的y的变化范围为-1~1。当p>0.5时,y为正,电动 机正转:当p<0.5时,y为负,电动机反转:当p=0.5时,y=0,电动机停止。需要注意的 是,当电机停止时电枢电压并不等于零,而是正负脉宽相等的交变脉冲电压,因而电流也是 交变的。这个交变电流的平均值为零,不产生平均转矩,徒然增大电机的损耗,这是双极式 控制的缺点。但它也有好处,在电机停止时仍有高频微振电流,从而消除了正、反向时的静 摩擦死区,起着所谓“动力润滑的作用。 双极式控制的桥式可逆PWM变换器具有以下优点: (1)电流一定连续。 (2)可使电动机在四象限运行。 (3)电机停止时有微振电流,能消除静摩擦死区。 (4)低速时,每个功率场效应管的驱动脉冲仍较宽,有利于保证功率场效应管可靠导通。 (5)低速平稳性好,调速范围可达1:20000左右。 双极式控制方式的不足之处是:在工作过程中,4个开关器件可能都处于开关状态,开 关损耗大,而且在切换时可能发生上、下桥臂直通的事故,为了防止直通,在上、下桥臂的 驱动脉冲之间,应设置逻辑延时。为了克服上述缺点,可采用单极式控制,使部分器件处于 常通或者常断状态,以减少开关次数和开关损耗,提高可靠性,但动态的静、动态性能会略 有降低。 3.2双极式可逆PWM变换器的建模与仿真 有一PWM可逆直流调速系统,主电路如图1所示,其中同服电动机的参数为:1I0V, 2.9A,2400rmin,电枢电阻R的值为3.4Q,电枢电感60.4mH,转动惯量0.014kgm2,励磁 电压110V,励磁电流0.5A
双极式可逆 PWM 变换器电枢平均端电压用公式表示为: - 2 - ( -1) on on on ds s s t Tt t UU U U TT T = = (1) 以 ρ =U Ud S 来定义 PWM 电压的占空比,则 ρ 与 ton的关系可以表示为: 2 1 on t T ρ = − (2) 双极式控制可逆 PWM 变换器的输出平均电压为 on on on ds s s 2 ( 1) t Tt t UU U U TT T − = − =− (3) 如果占空比和电压系数的定义与不可逆变换器相同,则双极式控制的可逆变换器中 PWM 电压系数γ 可以表示为: γ ρ = − 2 1 (4) 调速时,ρ 的变化范围为 0~1,相应的γ 的变化范围为-1~1。当 ρ > 0.5 时,γ 为正,电动 机正转;当 ρ < 0.5 时,γ 为负,电动机反转;当 ρ = 0.5 时,γ =0,电动机停止。需要注意的 是,当电机停止时电枢电压并不等于零,而是正负脉宽相等的交变脉冲电压,因而电流也是 交变的。这个交变电流的平均值为零,不产生平均转矩,徒然增大电机的损耗,这是双极式 控制的缺点。但它也有好处,在电机停止时仍有高频微振电流,从而消除了正、反向时的静 摩擦死区,起着所谓“动力润滑”的作用。 双极式控制的桥式可逆 PWM 变换器具有以下优点: (1)电流一定连续。 (2)可使电动机在四象限运行。 (3)电机停止时有微振电流,能消除静摩擦死区。 (4)低速时,每个功率场效应管的驱动脉冲仍较宽,有利于保证功率场效应管可靠导通。 (5)低速平稳性好,调速范围可达 1:20000 左右。 双极式控制方式的不足之处是:在工作过程中,4 个开关器件可能都处于开关状态,开 关损耗大,而且在切换时可能发生上、下桥臂直通的事故,为了防止直通,在上、下桥臂的 驱动脉冲之间,应设置逻辑延时。为了克服上述缺点,可采用单极式控制,使部分器件处于 常通或者常断状态,以减少开关次数和开关损耗,提高可靠性,但动态的静、动态性能会略 有降低。 3.2 双极式可逆 PWM 变换器的建模与仿真 有一 PWM 可逆直流调速系统,主电路如图 1 所示,其中伺服电动机的参数为:110V, 2.9A,2400r/min,电枢电阻 Ra的值为 3.4Ω ,电枢电感 60.4mH,转动惯量 0.014kg⋅m 2 ,励磁 电压 110V,励磁电流 0.5A