改进方法1-转矩闭环控制 少求理子大军 -☒AR ism ACMR ll'sd SV 旋 PWM 换 M 2r/2s 控制 ATR ACTR s0. 转 ism 旋转 计算 3/2 变换 2s/2r isB 变换 /B 转子 I st Isa 丝 磁链 计算 isB T L i 图7-21转矩闭环的矢量控制系统结构图 电气与电子工程学院自动化系
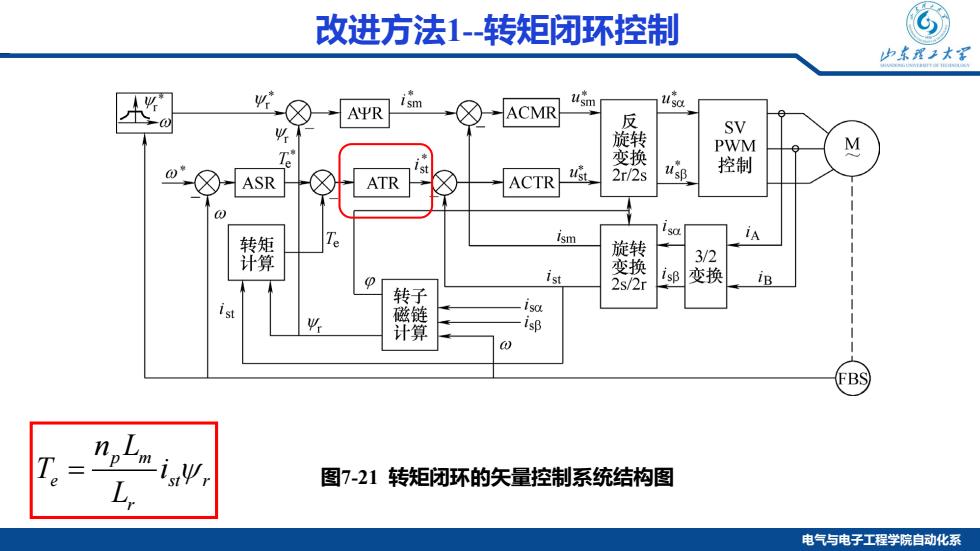
电气与电子工程学院自动化系 图7-21 转矩闭环的矢量控制系统结构图 改进方法1-转矩闭环控制 p m e st r r n L T i L = ψ
改进方法1-转矩闭环控制 山东理子大军 在转速调节器和电流转矩分量调节器间增设了转矩调节器,当转子磁链发生波动时 通过转矩调节器及时调整电流转矩分量给定值,以抵消磁链变化的影响,尽可能 不影响或少影响电动机转速。 口转子磁链扰动的作用点是包含在转矩环内的,可以通过转矩反馈来抑制扰动。若没 有转矩闭环,就只能通过转速外环来抑制转子磁链扰动,控制作用相对比较滞后。 AΨR ism /sm Lm Ts+1 电流闭 环控制 ASR ATR Lm 图7-26转矩闭环的矢量控制系统原理框图 电气与电子工程学院自动化系
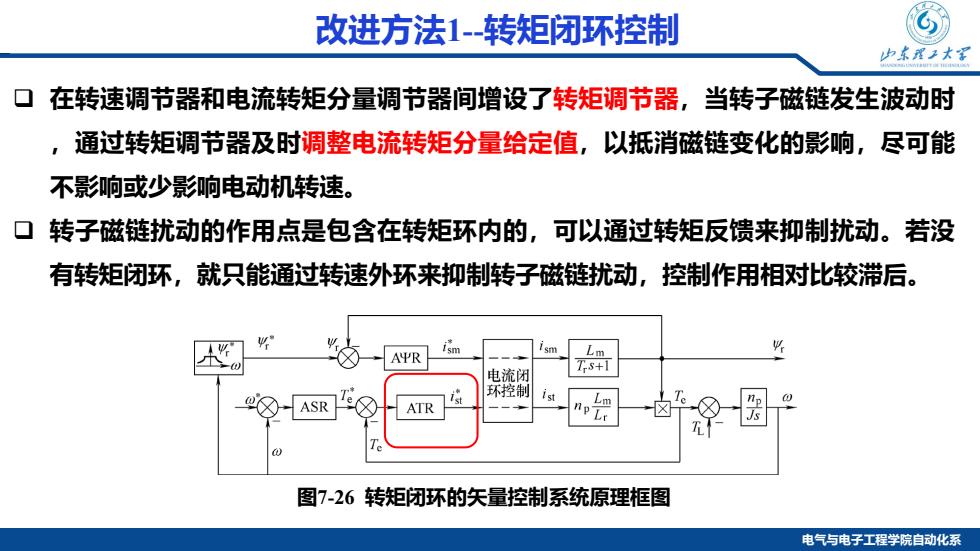
电气与电子工程学院自动化系 在转速调节器和电流转矩分量调节器间增设了转矩调节器,当转子磁链发生波动时 ,通过转矩调节器及时调整电流转矩分量给定值,以抵消磁链变化的影响,尽可能 不影响或少影响电动机转速。 转子磁链扰动的作用点是包含在转矩环内的,可以通过转矩反馈来抑制扰动。若没 有转矩闭环,就只能通过转速外环来抑制转子磁链扰动,控制作用相对比较滞后。 改进方法1-转矩闭环控制 图7-26 转矩闭环的矢量控制系统原理框图
改进方法2-带除法环节的矢量控制系统 少求理2大军 口转速调节器的输出为转矩给定,除以转子磁链,得到电流转矩分量给定,由于某 种原因使转子磁链减小时,通过除法环节可使电流转矩分量给定增大,尽可能保 持电磁转矩不变。 口用除法环节消去对象中固有的乘法环节,实现了转矩与转子磁链的动态解耦。 m ACMR s 旋 SV ust 变换 PWM usB -☒ASR 控制 ÷ ACTR 2s/2r Ism 旋转 3/2 ist 变换 B 转子 2s/2r 变换 磁 T 计算 L FBS 图7-23带除法环节的矢量控制系统结构图 电气与电子工程学院自动化系
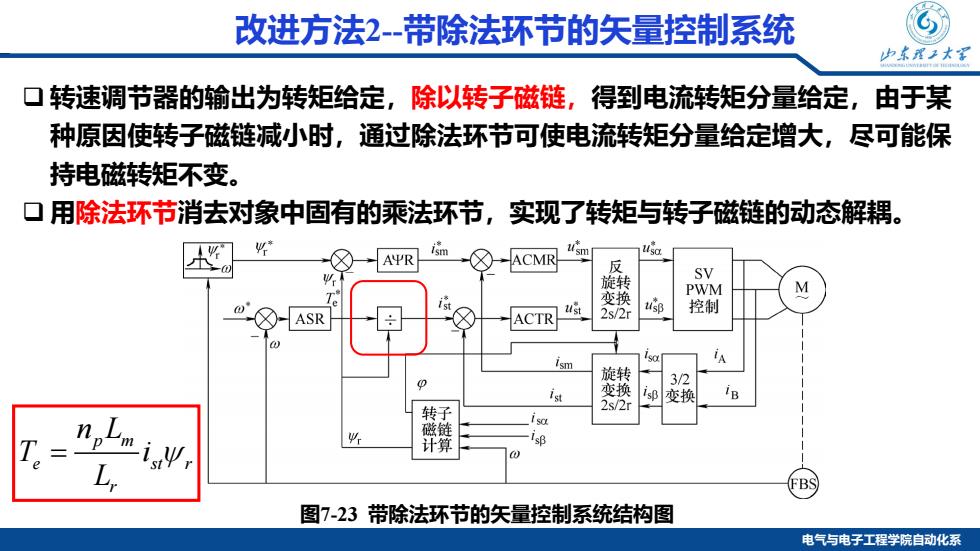
电气与电子工程学院自动化系 图7-23 带除法环节的矢量控制系统结构图 改进方法2-带除法环节的矢量控制系统 转速调节器的输出为转矩给定,除以转子磁链,得到电流转矩分量给定,由于某 种原因使转子磁链减小时,通过除法环节可使电流转矩分量给定增大,尽可能保 持电磁转矩不变。 用除法环节消去对象中固有的乘法环节,实现了转矩与转子磁链的动态解耦。 p m e st r r n L T i L = ψ

改进方法2-带除法环节的矢量控制系统 山东理子大等 sm /sm L 电流闭 Ts+1 环控制 ist ASR Lm 图7-24带除法环节的矢量控制系统原理框图 电气与电子工程学院自动化系
电气与电子工程学院自动化系 图7-24 带除法环节的矢量控制系统原理框图 改进方法2-带除法环节的矢量控制系统
改进方法2-带除法环节的矢量控制系统 山求理子大军 AΨR ☒ACMR u'sm 旋 SV PWM M 如何计算? ust 2s/2i usp 控制 -ACTR Ism IA p 旋转 3/2 ist 变换 2s/2r s邱变换 iB 转子 醉攀 isa isB FBS 电气与电子工程学院自动化系
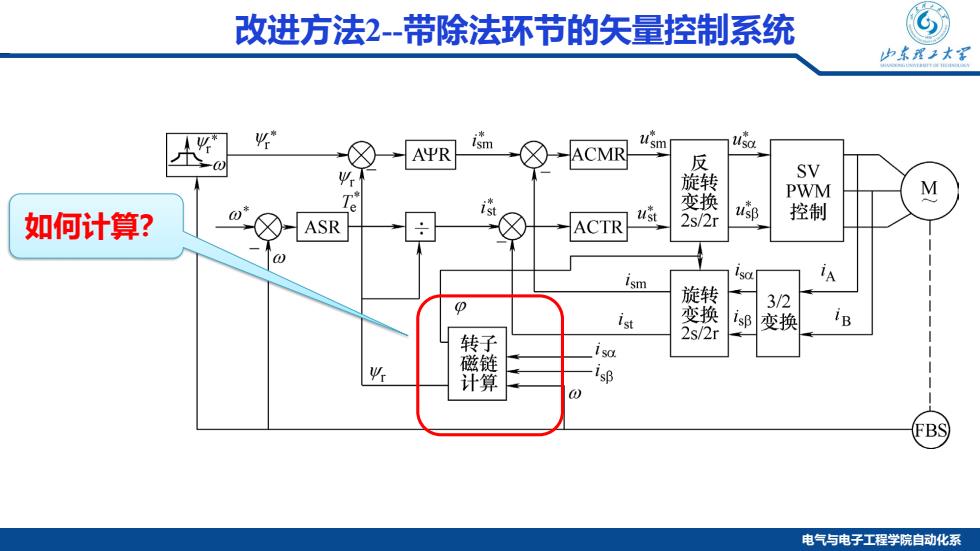
电气与电子工程学院自动化系 改进方法2-带除法环节的矢量控制系统 如何计算?