过程校制原狸与寇用我术) 中周她质大学(武议)安剑奇 第8章先进过程控制系统 8.1预测控制 8.2自适应控制 8.3统计过程控制 8.4控制系统故障诊断和容错控制
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 8.1 预测控制 8.2 自适应控制 8.3 统计过程控制 8.4 控制系统故障诊断和容错控制 第8章 先进过程控制系统
过程校制原狸与寇用我术月 中周她质大常(武议)安剑奇 8.1预测控制的基本原理 口预测控制由Richalet等1978年提出,发展了模型预测启发式控制, 模型算法控制,动态矩阵控制,预测控制等 ▣根据过程当前的和过去的输出测量值和设定值的偏差,及预测模 型来预估过程未来的偏差值,以滚动确定当前的最优输入策略 ▣该过程反复在线进行 过去 将来 Vd -000一0-0 +)。 v(k) 试k+) k+州 + 预测长度
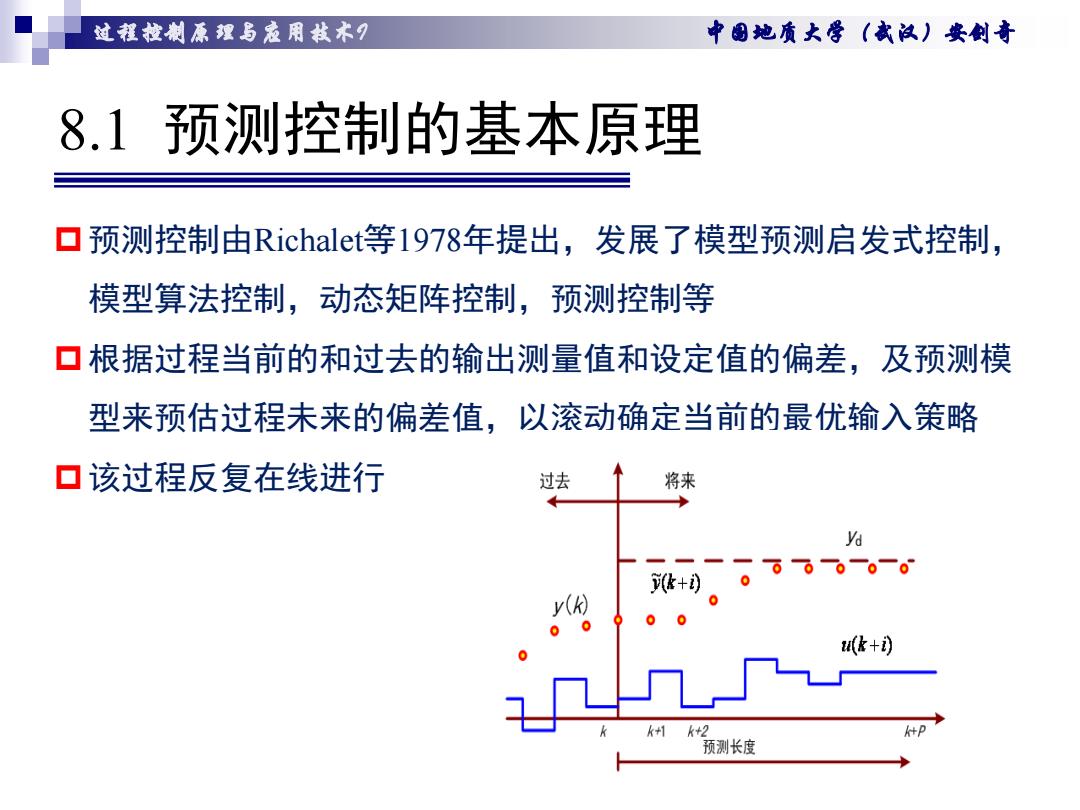
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 8.1 预测控制的基本原理 预测控制由Richalet等1978年提出,发展了模型预测启发式控制, 模型算法控制,动态矩阵控制,预测控制等 根据过程当前的和过去的输出测量值和设定值的偏差,及预测模 型来预估过程未来的偏差值,以滚动确定当前的最优输入策略 该过程反复在线进行
过程校制原狸与寇用我术月 中周她质大学(武议)安剑奇 8.1预测控制的基本原理 口由预测模型、参考轨迹、滚动优化、反馈校正等构成 ▣在当前时刻,基于过程模型预测未来有限时域的过程输出,通过 最小化输出响应与期望轨迹的偏差确定未来有限时域的控制增量; ▣在所得到的控制增量中,只执行当前的控制量 给定值y 参考轨线 y匠+) 控制输入 (&) 优化计算 过程 u(k) 输出 在线校正 匠+田 预测模型 依+)
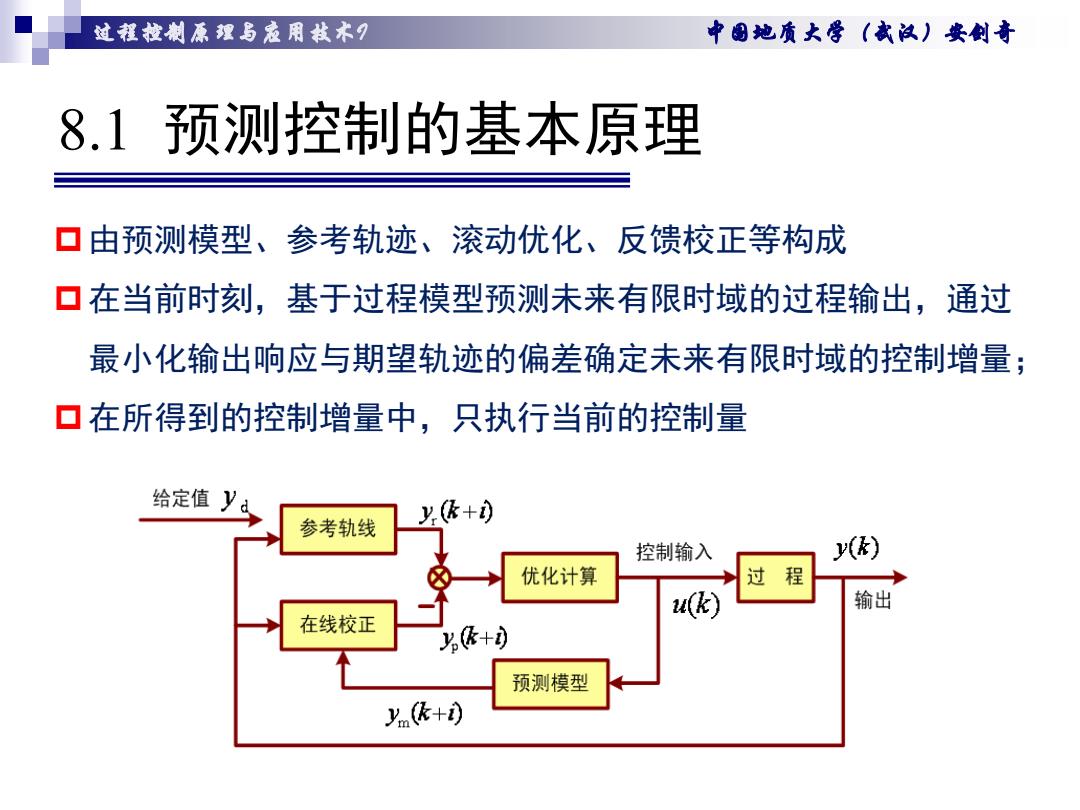
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 8.1 预测控制的基本原理 由预测模型、参考轨迹、滚动优化、反馈校正等构成 在当前时刻,基于过程模型预测未来有限时域的过程输出,通过 最小化输出响应与期望轨迹的偏差确定未来有限时域的控制增量; 在所得到的控制增量中,只执行当前的控制量

过程校制原狸局寇用我术? 中图她质大学(武议)安剑奇 8.1预测控制的基本原理 >预测模型 口一个描述系统动态行为的模型,在预测控制中具有重要的作用。 ▣常用:脉冲响应模型、阶跃响应模型、可控自回归滑动平均模型 (CARMA)、可控自回归积分滑动平均模型(CARIMA) >参考轨迹 ▣为避免过程输出的急剧变化,要求过程输出沿着事先指定的一条随 时间而变化的轨迹达到给定值 >控制算法 ▣找到一组能满足性能指标的控制作用,使选定的目标函数最优
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 8.1 预测控制的基本原理 预测模型 一个描述系统动态行为的模型,在预测控制中具有重要的作用。 常用:脉冲响应模型、阶跃响应模型、可控自回归滑动平均模型 (CARMA)、可控自回归积分滑动平均模型(CARIMA) 参考轨迹 为避免过程输出的急剧变化,要求过程输出沿着事先指定的一条随 时间而变化的轨迹达到给定值 控制算法 找到一组能满足性能指标的控制作用,使选定的目标函数最优
过程校制原狸与寇用我术月 中周她质大常(武议)安剑奇 8.2自适应控制 >自适应控制的基本原理 ▣根据参考模型的输出与实际过程的输出之差来自动调整控制器的参 数,以适应过程特性或环境的变化 口自适应控制系统至少由测量和估计环节、性能指标的评价环节、控 制决策和自动调整环节等三部分组成 性能评估 控制决策 参数估计 R(s) 八s Y(s) 控制器 被控过程
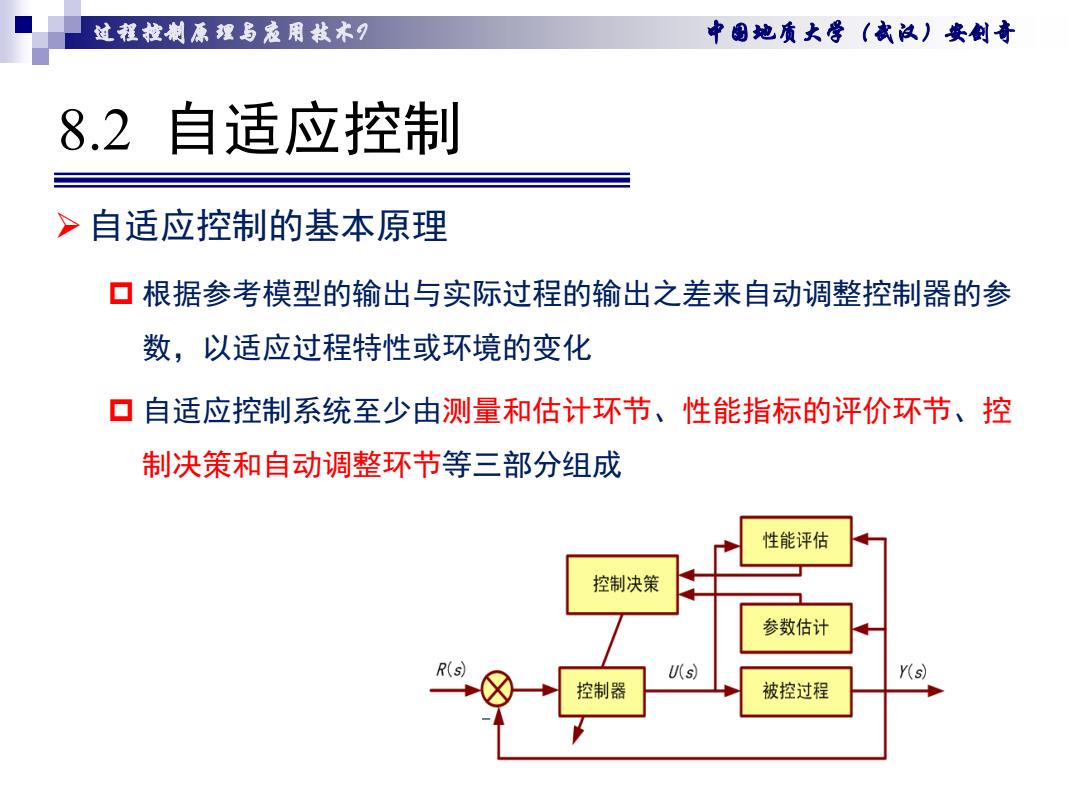
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 8.2 自适应控制 自适应控制的基本原理 根据参考模型的输出与实际过程的输出之差来自动调整控制器的参 数,以适应过程特性或环境的变化 自适应控制系统至少由测量和估计环节、性能指标的评价环节、控 制决策和自动调整环节等三部分组成