先进控制理论与控制工程 中圆地质大学自动化学院吴敏 第三讲: 时滞系统鲁棒控制 79 2021年9月13日
79 2021年9月13日 时滞系统鲁棒控制 第三讲: 先进控制理论与控制工程 吴 敏
先进控制理论与控制工程 中固地质大芳自动化学院吴敏 时滞系统鲁棒控制 研究背景 时滞相关鲁棒控制方法 > 全新的自由权矩阵方法 > 时滞相关稳定性分析 改进的自由权矩阵方法 80 2021年9月13日
80 2021年9月13日 时滞系统鲁棒控制 研究背景 时滞相关鲁棒控制方法 全新的自由权矩阵方法 时滞相关稳定性分析 改进的自由权矩阵方法 先进控制理论与控制工程 吴 敏

先进控制理论与控制工程 中固地质大学 自动化学院吴敏 研究背景 >工业过程控制中的时滞问题 ◆温度控制中的时延(如加热炉、炼焦生产过程、铁矿旷石和有色金属矿 烧结过程、高炉等) ◆如何克服时滞来保证控制系统性能 ◆如何利用时滞环节来提高控制系统性能 >冶金工业过程 大型互联电网 >网络控制系统 ✉目是是= 品 81 2021年9月13日
81 2021年9月13日 研究背景 工业过程控制中的时滞问题 温度控制中的时延(如加热炉、炼焦生产过程、铁矿石和有色金属矿 烧结过程、高炉等) 如何克服时滞来保证控制系统性能 如何利用时滞环节来提高控制系统性能 冶金工业过程 大型互联电网 网络控制系统 先进控制理论与控制工程 吴 敏
先进控制理论与控制工程 中圆记质大学自动化学院吴敏 时滞系统控制问题 >时滞系统建模问题:如何描述时滞系统 >时滞无关与时滞相关 (t)=Ax(t)+Adx(t-h) (1) (=(A+A)x() (2) ◆ 当=0时,系统(1)就是系统(2)。 设系统(2)稳定,根据连续性,当很小时系统(1)稳定, 但并非对任意>0都是稳定的。 82 2021年9月13日
82 2021年9月13日 时滞系统控制问题 时滞系统建模问题:如何描述时滞系统 当h=0时,系统(1)就是系统(2)。 设系统(2)稳定,根据连续性,当h很小时系统(1)稳定, 但并非对任意h>0都是稳定的。 ( ) ( ) ( ) (2) ( ) ( ) ( ) (1) x t A A x t x t Ax t A x t h d d - 时滞无关与时滞相关 先进控制理论与控制工程 吴 敏
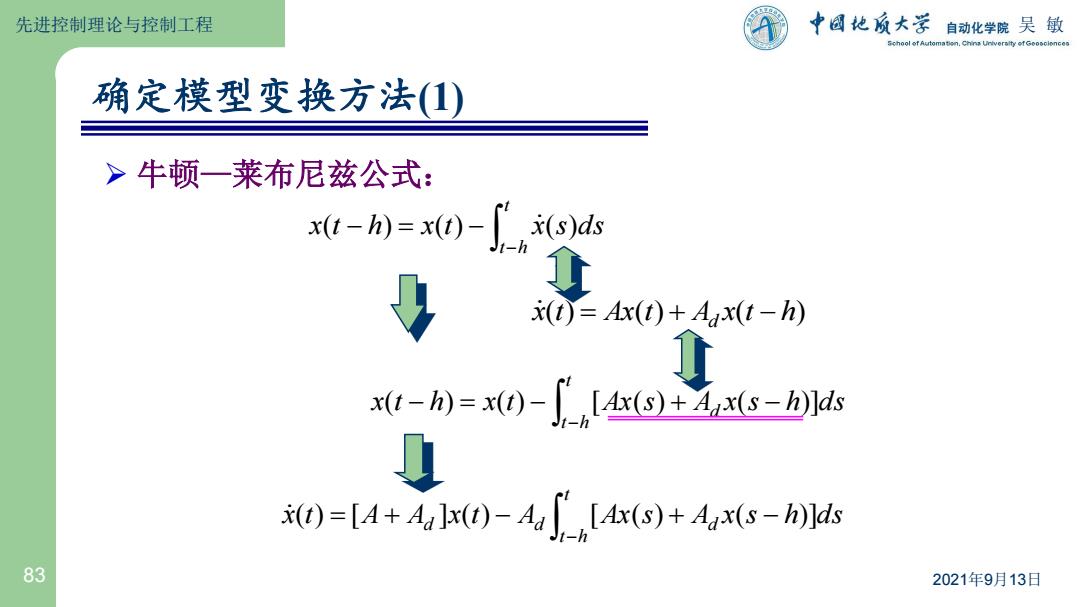
先进控制理论与控制工程 中国地质大学自动化学院吴敏 确定模型变换方法(1) >牛顿一莱布尼兹公式: xt-M=x0-∫ss (t)=Ax(t)+Aux(t-h) ① x(t-h)=x(t)-[LAx(s)+Ajx(s-h)]ds 0 ()=[4+Au kx()-Aa [Ax(s)+Aax(s-h)lds 83 2021年9月13日
83 2021年9月13日 - - - t t h x(t) [A Ad ]x(t) Ad [Ax(s) Ad x(s h)]d s 确定模型变换方法(1) 牛顿—莱布尼兹公式: - - - t t h x(t h) x(t) x(s)ds x(t) Ax(t) A x(t h) d - - - - - t t h x(t h) x(t) [Ax(s) Ad x(s h)]ds 先进控制理论与控制工程 吴 敏