过程拉制原狸与爱用栽术? 中周她质大学(武议)安剑奇 第3章执行器 2
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 第3章 执行器 2
过程拉制原狸与爱用栽术月 中围她质大学(武汉)安剑奇 执行器 3.1执行器的工作原理与分类 3.2电动执行机构 3.3气动执行机构 3.4液动执行机构 3.5调节机构 3.6执行器的选择 3.7其他执行设备 3.8本章小结 3
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.1 执行器的工作原理与分类 3.2 电动执行机构 3.3 气动执行机构 3.4 液动执行机构 3.5 调节机构 3.6 执行器的选择 3.7 其他执行设备 3.8 本章小结 执行器 3

过程拉制原狸与爱用栽术月 中图她质大学(武议)安剑青 3.1执行器的工作原理与分类 >执行器 口执行机构接受控制器的信号, 转换成角位移或直线位移,改变调 节机构的流通面积,从而调节流入或流出被控过程的物料或能量, 实现对温度、压力、流量等过程被控参数的自动控制 ▣执行器的组成:执行机构,调节机构(调节阀) 输入信号 信号转 执行 阀门位置 换单元 机构 发生单元 调节阀 位置负反馈 执行器工作原理图 浪动属式气红活来执行群 4
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.1 执行器的工作原理与分类 执行器 执行机构接受控制器的信号,转换成角位移或直线位移,改变调 节机构的流通面积,从而调节流入或流出被控过程的物料或能量, 实现对温度、压力、流量等过程被控参数的自动控制 执行器的组成:执行机构,调节机构(调节阀) 4 执行器工作原理图
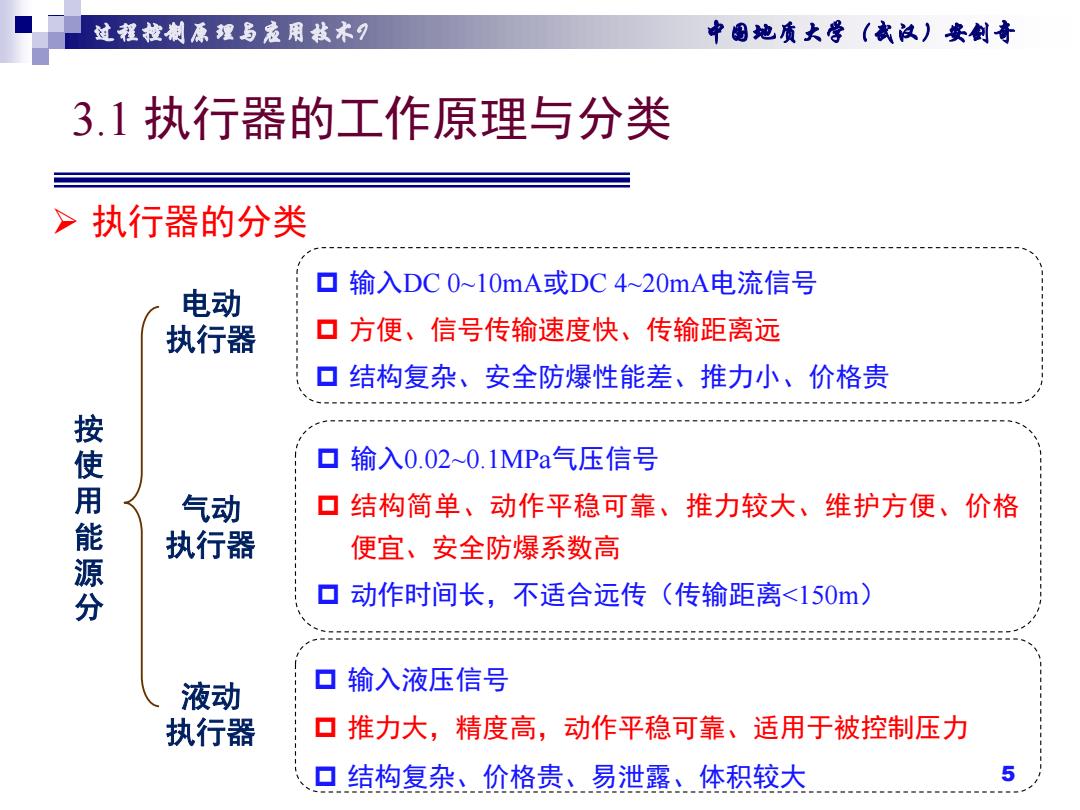
过程拉制原狸写寇用技术 中周她质大学(武议)安剑奇 3.1执行器的工作原理与分类 >执行器的分类 ▣ 输入DC0~10mA或DC4~20mA电流信号 电动 执行器 ▣方便、信号传输速度快、传输距离远 ▣ 结构复杂、安全防爆性能差、推力小、价格贵 按使用能源分 ▣ 输入0.02~0.1MPa气压信号 气动 ▣ 结构简单、动作平稳可靠、推力较大、维护方便、价格 执行器 便宜、安全防爆系数高 ▣ 动作时间长,不适合远传(传输距离<150m) 液动 输入液压信号 执行器 推力大,精度高,动作平稳可靠、适用于被控制压力 口结构复杂、价格贵、易泄露、体积较大 5
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.1 执行器的工作原理与分类 执行器的分类 5 按 使 用 能 源 分 电动 执行器 气动 执行器 液动 执行器 输入DC 0~10mA或DC 4~20mA电流信号 方便、信号传输速度快、传输距离远 结构复杂、安全防爆性能差、推力小、价格贵 输入0.02~0.1MPa气压信号 结构简单、动作平稳可靠、推力较大、维护方便、价格 便宜、安全防爆系数高 动作时间长,不适合远传(传输距离<150m) 输入液压信号 推力大,精度高,动作平稳可靠、适用于被控制压力 结构复杂、价格贵、易泄露、体积较大
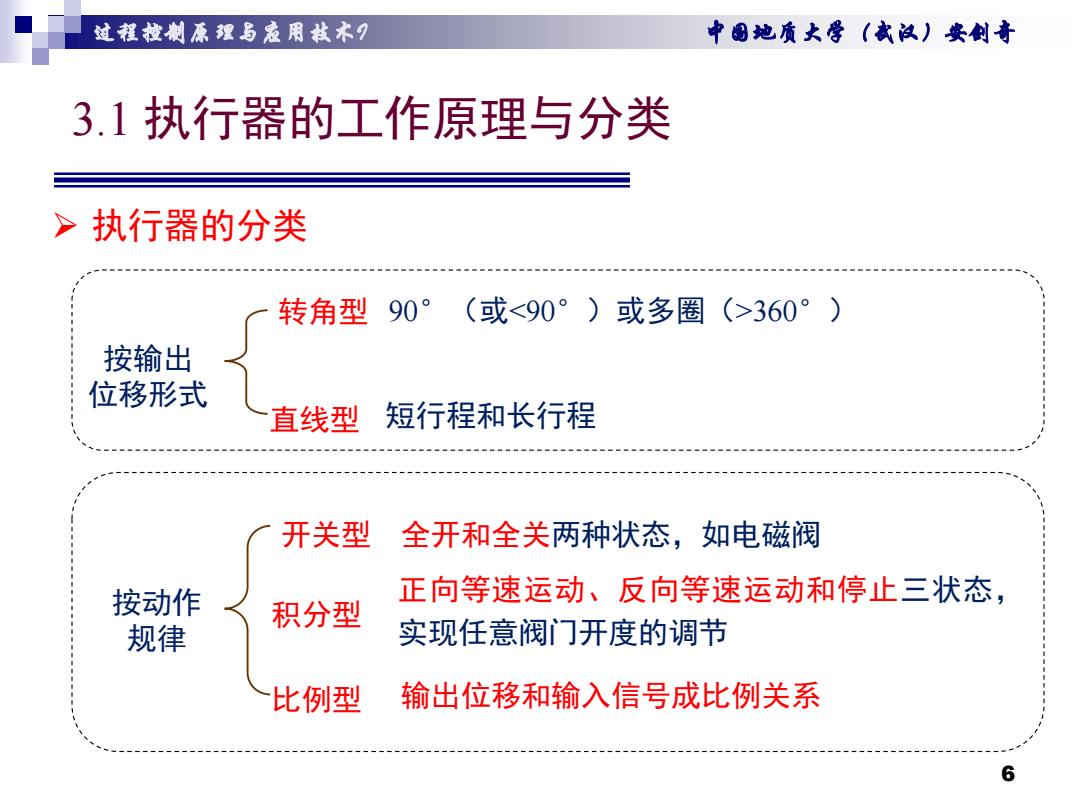
过程拉制原狸与爱用栽术月 中图她质大常(武议)安剑奇 3.1执行器的工作原理与分类 >执行器的分类 转角型90° (或<90°)或多圈(>360°) 按输出 位移形式 直线型 短行程和长行程 开关型 全开和全关两种状态,如电磁阀 按动作 正向等速运动、反向等速运动和停止三状态, 积分型 规律 实现任意阀门开度的调节 比例型 输出位移和输入信号成比例关系 6
过程控制原理与应用技术I 中国地质大学(武汉)安剑奇 3.1 执行器的工作原理与分类 执行器的分类 6 转角型 90°(或<90°)或多圈(>360°) 直线型 短行程和长行程 按输出 位移形式 开关型 全开和全关两种状态,如电磁阀 积分型 正向等速运动、反向等速运动和停止三状态, 实现任意阀门开度的调节 比例型 输出位移和输入信号成比例关系 按动作 规律