第二为 第五章 微积分的基本公式 一、引例 二、积分上限的函数及其导数 三、牛顿-莱布尼兹公式 OOo⊙08
二、积分上限的函数及其导数 三、牛顿 – 莱布尼兹公式 一、引例 第二节 机动 目录 上页 下页 返回 结束 微积分的基本公式 第五章
、 引例 在变速直线运动中,已知位置函数s(t)与速度函数v(t) 之间有关系: s'(t)=v(t) 物体在时间间隔[口,T,]内经过的路程为 ∫)d=2)-sg) 这里s(t)是v(t)的原函数 这种积分与原函数的关系在一定条件下具有普遍性
一、引例 在变速直线运动中, 已知位置函数 与速度函数 之间有关系: s (t) = v(t) 物体在时间间隔 内经过的路程为 ( )d ( ) ( ) 2 1 2 1 v t t s T s T T T = − 这种积分与原函数的关系在一定条件下具有普遍性 . 机动 目录 上页 下页 返回 结束
二、积分上限的函数及其导数 定理1.若f(x)∈C[a,b],则变上限函数 Φ(x)=∫f)dt Φ(x 是f(x)在[a,b]上的一个原函数. 证:x,x+h∈[a,b],则有 x b x +月-四-0f0d-f0a] x+h h =6Jf0d1=f5)(x<5<x+) .'f(x)∈C[a,b] ∴.Φ'(x)=lim Φ(x+h)-Φ(x) =limf()=f(x) h→0 h h→0 Ooo⊙⊙8
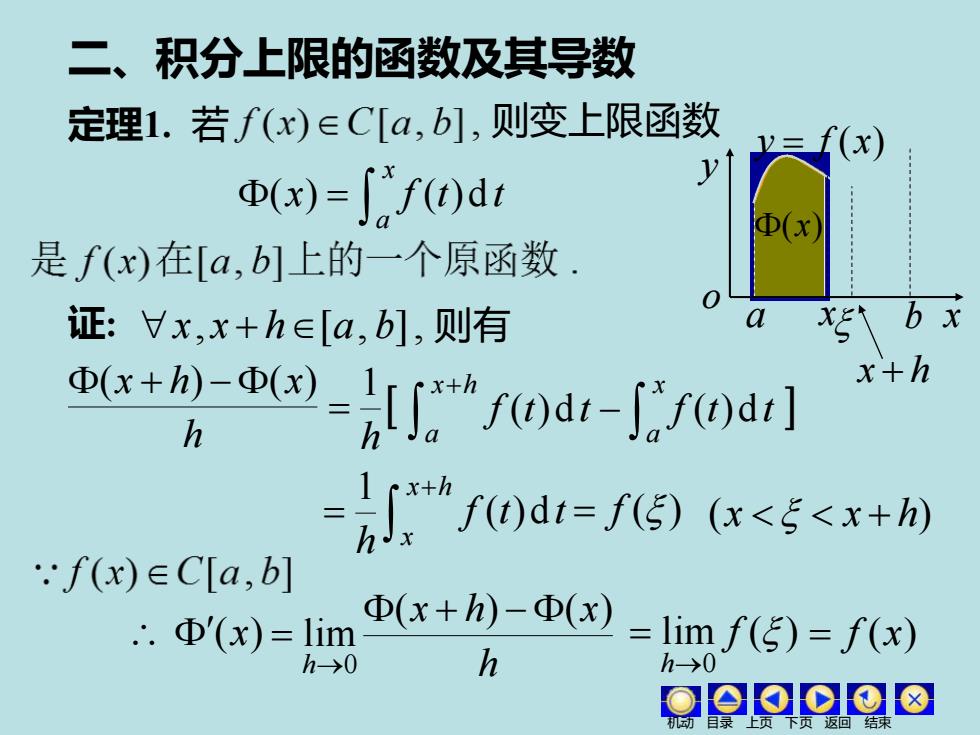
y = f (x) a b x o y (x) x x + h 二、积分上限的函数及其导数 则变上限函数 = x a (x) f (t)dt 证: x, x + h[a, b], 则有 h (x + h) −(x) h 1 = − + x a x h a f (t)dt f (t)dt + = x h x f t t h ( )d 1 = f () (x x + h) h x h x h ( ) ( ) lim 0 + − = → lim ( ) 0 f h→ (x) = = f (x) 机动 目录 上页 下页 返回 结束 定理1. 若
说明: 1)定理1证明了连续函数的原函数是存在的.同时为 通过原函数计算定积分开辟了道路. 2)变限积分求导&∫/0)d1=- &”roa=ey dlrwd-[aoa+"oar] =f[e(x)]e(x)-flw(x)]w(x)
说明: 1) 定理 1 证明了连续函数的原函数是存在的. 2) 变限积分求导: ( ) ( )d d d x a f t t x = f [(x)](x) 同时为 通过原函数计算定积分开辟了道路 . 机动 目录 上页 下页 返回 结束 ( ) ( ) ( )d d d x x f t t x = f [(x)](x) − f [(x)](x) + = ( ) ( ) ( )d ( )d d d x a a x f t t f t t x
例1.求lim x→0 解: 原式 =-lime-cos'x(-sinx) 1 x→0 2x 2e 例2.确定常数a,b,c的值,使 ax-sinx lim =c(c≠0). (+2)dr 0-0 解:x→0时,ax-sinx→0,c≠0,.b=0. 原式=lim, -cosx x→0ln(1+x2) lim a-cosx =C c0,故a=1.又由1-c0sx~2x2,得c= o0o0
( sin ) 2 cos e x x − − 例1. 求 解: 原式 0 lim → = − x 0 0 2x 2e 1 = 说明 目录 上页 下页 返回 结束 例2. 确定常数 a , b , c 的值, 使 解: b = 0. 原式 = c ≠0 , 故 a =1. 又由 ~ , 得 . 2 1 c =