自动控制理论 4@)-20e10-20g0-20电1-(分°+20e+(8 特点: D低频段斜率为20d%c在@=1处,高度为201g10=20dB。 2为o≥2,斜率山-20d0形%ec→40d1B%c 3》为o≥10,斜率由40d9%ce→20a%ec (2)相频特性 0 0 (@)=-90-arctan+arctan 2 10 16 第五章频率响应法 2025/1/14
16 第五章 频率响应法 2025/1/14 ) dB。 dec dB 1 20lg10 20 20 1 低频段斜率为− ,在 = 处,高度为 = )为 ; dec dB dec 20dB 40 2 2,斜率由− → − 2 2 ) 10 ) 20lg 1 ( 2 ( ) 20lg10 20lg 20lg 1 ( L = − − − + + 3)为 10,斜率由− 40dB dec → − 20dB dec。 (2)相频特性 10 arctan 2 ( ) 90 arctan = − − + 自动控制理论 特点:
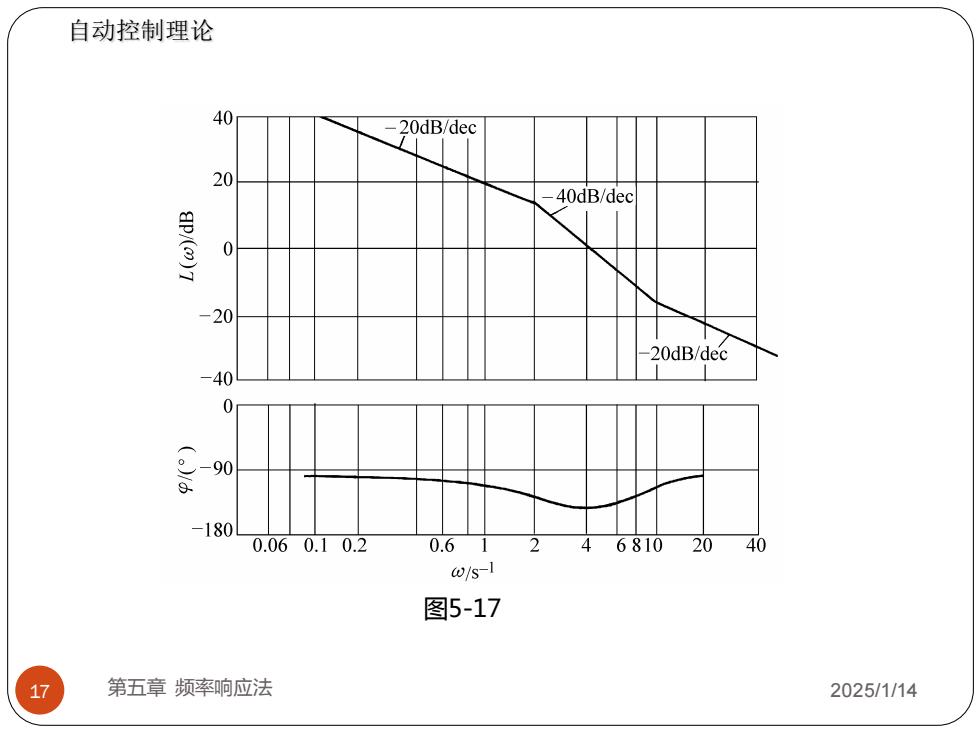
自动控制理论 40 -20dB/dec 20 40dB/dec 0 -20 20dB/dec -40 -180 0.060.10.2 0.612468102040 @/s-1 图5-17 17 第五章频率响应法 2025/1/14
17 第五章 频率响应法 2025/1/14 图5-17 自动控制理论

自动控制理论 三、最小相位系统与非最小相位系统 设a和b两个系统的传递函数和频率特性分别为: G(S)= 1+T, 1+TS ,G.j0)= I+Tj@,T>T 1+Tj@ G(S)=1-I3 .G,(j0)- -T2j0 1+TS 1+Tj@ 这两个系统的幅频特性是相同的,即: 18 第五章频率响应法 2025/1/14
18 第五章 频率响应法 2025/1/14 三、最小相位系统与非最小相位系统 设a和b两个系统的传递函数和频率特性分别为: 1 2 1 2 1 2 , 1 1 , ( ) 1 1 ( ) T T T j T j G j T S T S Ga S a + + = + + = T j T j G j T S T S Gb S a 1 2 1 2 1 1 , ( ) 1 1 ( ) + − = + − = 这两个系统的幅频特性是相同的,即: 2 2 2 1 ) 1 ) 20lg 1 ( 1 ( ) 20lg 1 ( T T L = − + + + 自动控制理论
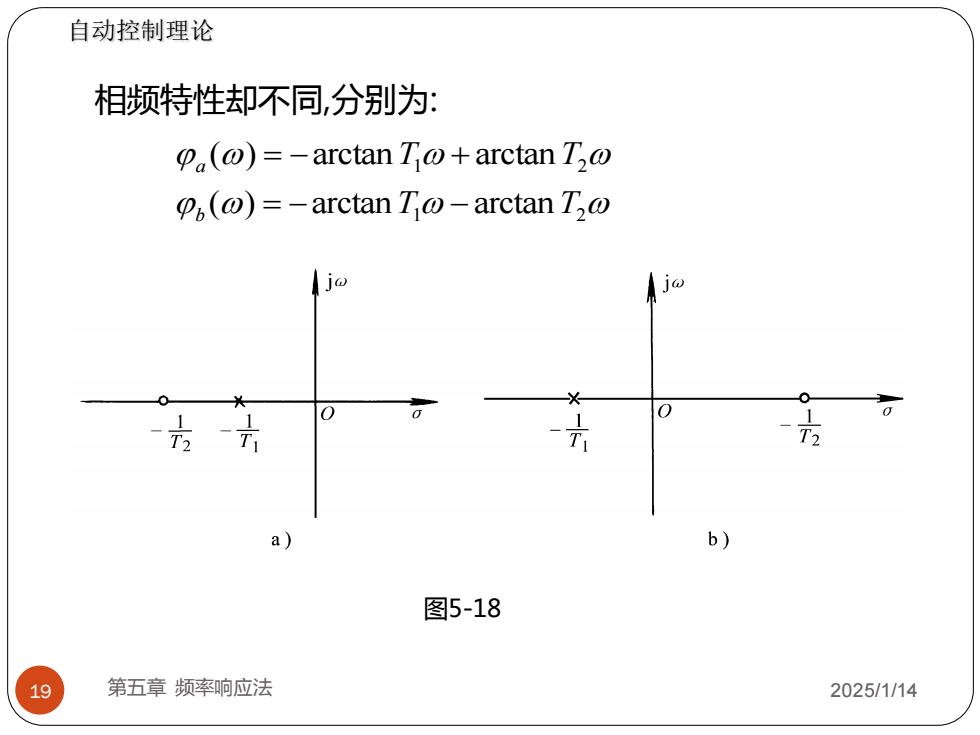
自动控制理论 相频特性却不同,分别为: (@)=-arctan To+arctan T,o (@)=-arctan To-arctan T,w 0 T T2 a) b) 图5-18 19 第五章频率响应法 2025/1/14
19 第五章 频率响应法 2025/1/14 相频特性却不同,分别为: 1 2 1 2 ( ) arctan arctan ( ) arctan arctan T T T T b a = − − = − + 图5-18 自动控制理论

自动控制理论 L()/dB T2 -20dB/dec 9(o)/() 0 a -90 180 图5-19 20 第五章频率响应法 2025/1/14
20 第五章 频率响应法 2025/1/14 图5-19 自动控制理论