S16-6用求解器求极限荷载 S16-6用求解器求极限荷载 求解器可以计算一般平面结构的极限荷载并能静态或动画显示破坏机构的单向运动模 态。荷载可以是集中荷载或者均布荷载。由于极限荷载和各个杆件刚度无关,因此可以不输 入杆件刚度(当然输入也无妨)。因此,除了按常规输入结构体系外,还要输入各杆的极限弯 矩和对解答精度控制的误差限,求解器解出的解与精确解相比其误差不超过用户指定的误差 限。由于求解器采用精确求解,通常一个杆件取为一个单元即可。对于低版本的求解器,要 求集中荷载作用在结点上,这样杆件上如有集中荷载作用,就要再分单元以使集中荷载作用 点处成为一个结点。 杆件的极限弯矩的输入同杆件的刚度输入步骤一样,而且在同一个对话框中,这里不再 详述。为了输入误差限的值,依次选择菜单:“命令”、“其他参数”、“极限荷载”,从而打开 “误差限”对话框,然后输入数值即可。如果不输入误差限,求解器将使用缺省值0.05。以 下通过具体的例题作进一步的介绍。 例16-6-1试用求解器重新求解例15-6。单元及结点编码见图16-6-1。为比较方便,有关 数据采用单位值:I=lm,Mn=1kN·m。 TITLE,例16-6-1 结点,1,0,0 结点,2,0,1 结点,3,1,1 2 3 1.5M 结点,4,2,1 (2) (3) 结点,5,2,0 单元,1,2,1,1,1,1,1,1 M (1) 4 单元生成,3,1,1,1 结点支承,1,6,0,0,0,0 结点支承,5,6,0,0,0,0 结点荷载,2,1,1,0 结点荷载,3,1,1,-90 单元材料性质,1,4,0,0,0,1,-1 单元材料性质,2,3,0,0,0,1.5,-1 图16-6-1例16-6-1图 极限荷载参数,0.005 END 解输入的结构和命令文档如图16-6-1 所示。计算的极限荷载为3.5kN,与精确解 完全一样。求解器中显示的破坏机构模态在 图16-6-2中给出。 例16-6-2试用求解器求解图16-6-3中 所示的均布荷载作用下门式刚架的极限荷 载和破坏机构模态,有关数据为各杆长 图16-6-2例16-6-1的破坏机构运动模态 1=1m,Mm=10kNm
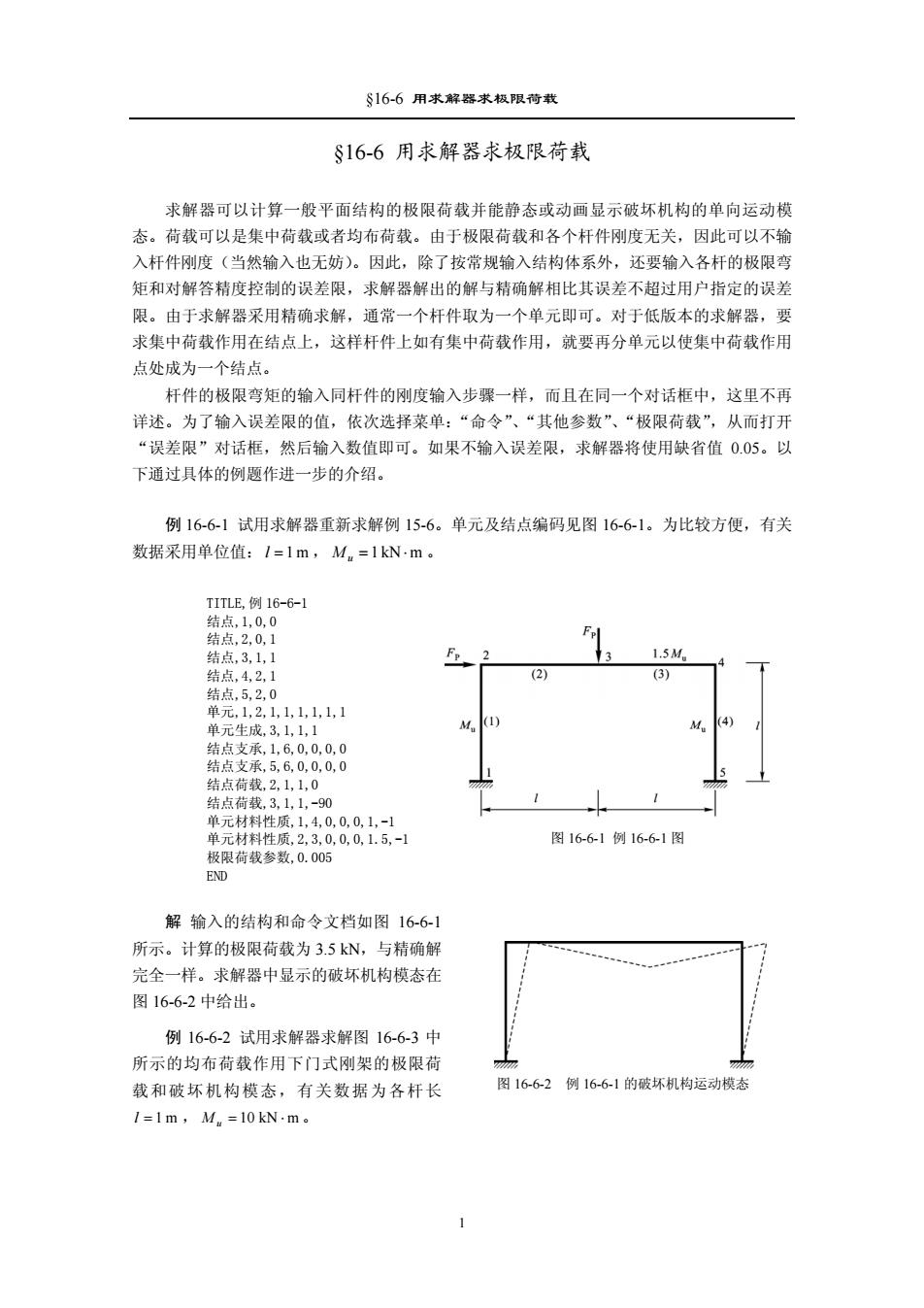
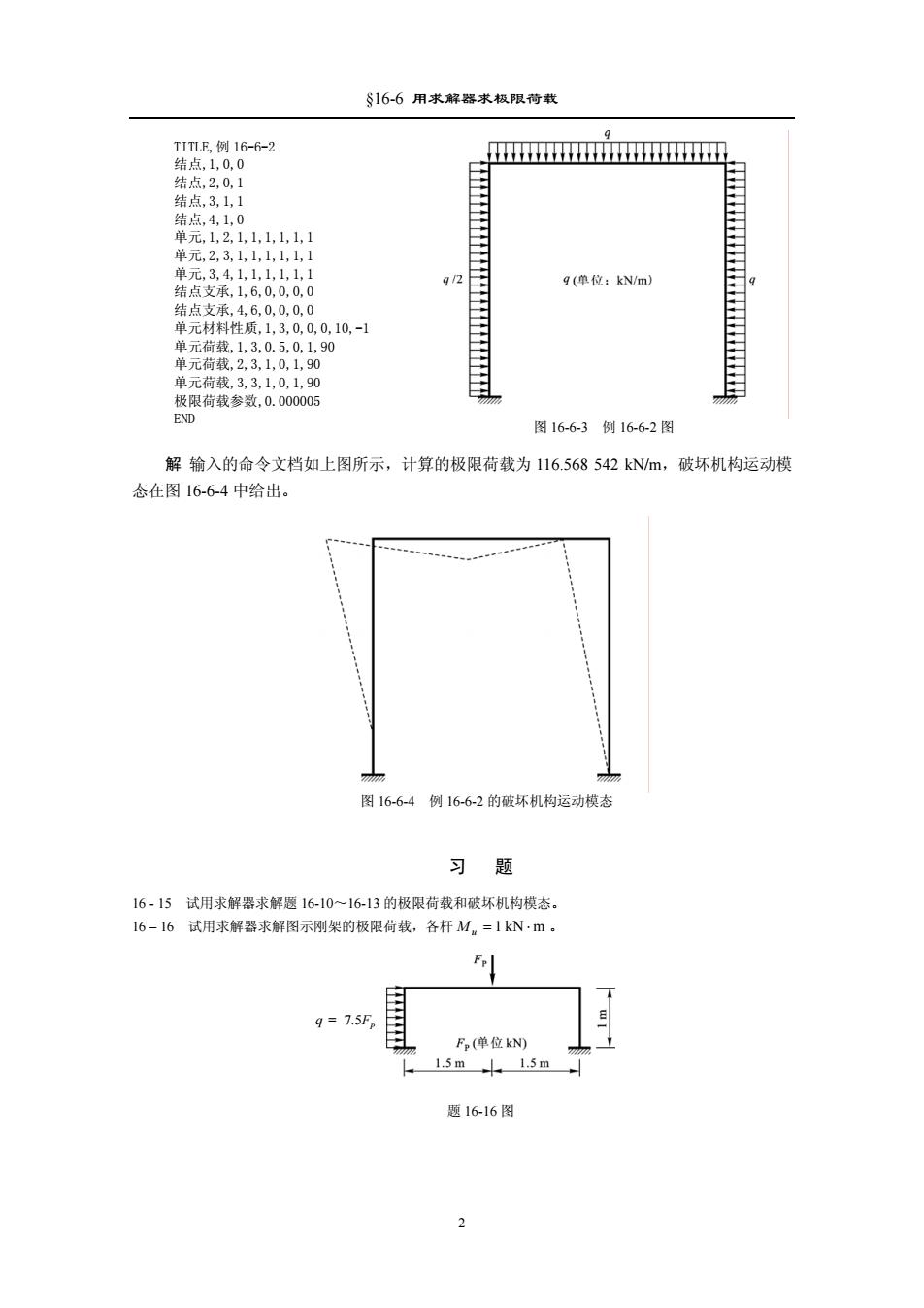
§16-6 用求解器求极限荷载 §16-6 用求解器求极限荷载 求解器可以计算一般平面结构的极限荷载并能静态或动画显示破坏机构的单向运动模 态。荷载可以是集中荷载或者均布荷载。由于极限荷载和各个杆件刚度无关,因此可以不输 入杆件刚度(当然输入也无妨)。因此,除了按常规输入结构体系外,还要输入各杆的极限弯 矩和对解答精度控制的误差限,求解器解出的解与精确解相比其误差不超过用户指定的误差 限。由于求解器采用精确求解,通常一个杆件取为一个单元即可。对于低版本的求解器,要 求集中荷载作用在结点上,这样杆件上如有集中荷载作用,就要再分单元以使集中荷载作用 点处成为一个结点。 杆件的极限弯矩的输入同杆件的刚度输入步骤一样,而且在同一个对话框中,这里不再 详述。为了输入误差限的值,依次选择菜单:“命令”、“其他参数”、“极限荷载”,从而打开 “误差限”对话框,然后输入数值即可。如果不输入误差限,求解器将使用缺省值 0.05。以 下通过具体的例题作进一步的介绍。 例 16-6-1 试用求解器重新求解例 15-6。单元及结点编码见图 16-6-1。为比较方便,有关 数据采用单位值:l = 1 m , Mu =1 kN ⋅m 。 TITLE,例 16-6-1 结点,1,0,0 结点,2,0,1 结点,3,1,1 结点,4,2,1 结点,5,2,0 单元,1,2,1,1,1,1,1,1 单元生成,3,1,1,1 结点支承,1,6,0,0,0,0 结点支承,5,6,0,0,0,0 结点荷载,2,1,1,0 结点荷载,3,1,1,-90 单元材料性质,1,4,0,0,0,1,-1 单元材料性质,2,3,0,0,0,1.5,-1 极限荷载参数,0.005 END 图 16-6-1 例 16-6-1 图 解 输入的结构和命令文档如图 16-6-1 所示。计算的极限荷载为 3.5 kN,与精确解 完全一样。求解器中显示的破坏机构模态在 图 16-6-2 中给出。 例 16-6-2 试用求解器求解图 16-6-3 中 所示的均布荷载作用下门式刚架的极限荷 载和破坏机构模态,有关数据为各杆长 l = 1 m , M u = 10 kN ⋅ m 。 图 16-6-2 例 16-6-1 的破坏机构运动模态 1
§16-6用求解器求极限荷载 TITLE,例16-6-2 结点,1,0,0 结点,2,0,1 结点,3,1,1 结点,4,1,0 单元,1,2,1,1,1,1,1,1 单元,2,3,1,1,1,1,1,1 单元,3,4,1,1,1,1,1,1 9/2 g(单位:kN/m) 结点支承,16,0,0,0,0 结点支承,4,6,0,0,0,0 单元材料性质,1,3,0,0,0,10,-1 单元荷载,1,3,0.5,0,1,90 单元荷载,2,3,1,0,1,90 单元荷载,3,3,1,0,1,90 极限荷载参数,0.000005 END 图16-6-3例16-6-2图 解输入的命令文档如上图所示,计算的极限荷载为116.568542kN/m,破坏机构运动模 态在图16-6-4中给出。 图16-6-4例16-6-2的破坏机构运动模态 习 题 16-15试用求解器求解题1610~16-13的极限荷载和破坏机构模态。 16-16试用求解器求解图示刚架的极限荷载,各杆M,=1kN.m。 q 7.5Fp F.(单位kN) 1.5m1.5m 题16-16图 2
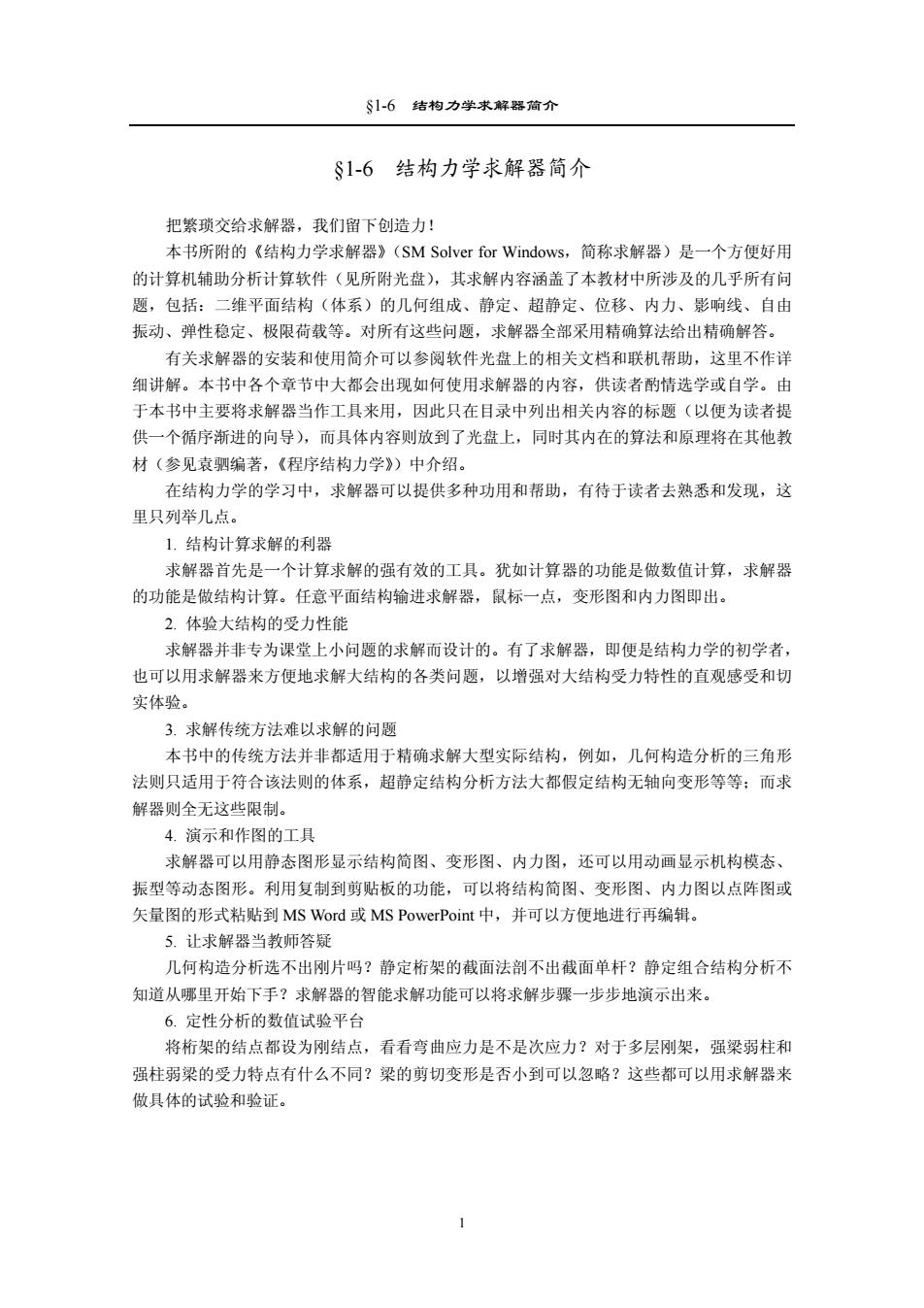
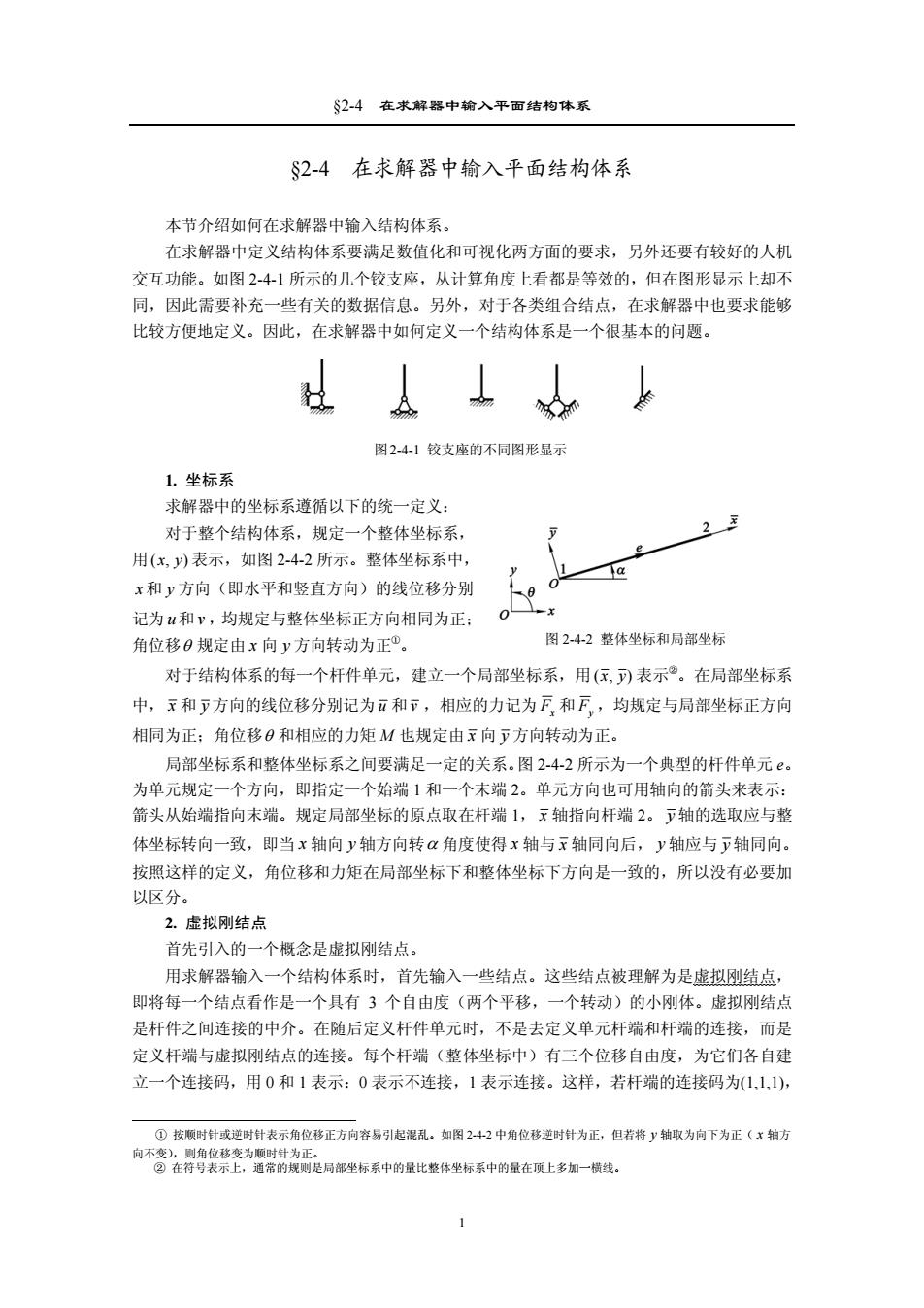
§16-6 用求解器求极限荷载 TITLE,例 16-6-2 结点,1,0,0 结点,2,0,1 结点,3,1,1 结点,4,1,0 单元,1,2,1,1,1,1,1,1 单元,2,3,1,1,1,1,1,1 单元,3,4,1,1,1,1,1,1 结点支承,1,6,0,0,0,0 结点支承,4,6,0,0,0,0 单元材料性质,1,3,0,0,0,10,-1 单元荷载,1,3,0.5,0,1,90 单元荷载,2,3,1,0,1,90 单元荷载,3,3,1,0,1,90 极限荷载参数,0.000005 END 图 16-6-3 例 16-6-2 图 解 输入的命令文档如上图所示,计算的极限荷载为 116.568 542 kN/m,破坏机构运动模 态在图 16-6-4 中给出。 图 16-6-4 例 16-6-2 的破坏机构运动模态 习 题 16 - 15 试用求解器求解题 16-10~16-13 的极限荷载和破坏机构模态。 16 – 16 试用求解器求解图示刚架的极限荷载,各杆 M u = 1 kN ⋅ m 。 7.5 P q F = 题 16-16 图 2
§1-6结构力学求解器简介 §1-6结构力学求解器简介 把繁琐交给求解器,我们留下创造力! 本书所附的《结构力学求解器》(SM Solver for Windows,简称求解器)是一个方便好用 的计算机辅助分析计算软件(见所附光盘),其求解内容涵盖了本教材中所涉及的几乎所有问 题,包括:二维平面结构(体系)的几何组成、静定、超静定、位移、内力、影响线、自由 振动、弹性稳定、极限荷载等。对所有这些问题,求解器全部采用精确算法给出精确解答。 有关求解器的安装和使用简介可以参阅软件光盘上的相关文档和联机帮助,这里不作详 细讲解。本书中各个章节中大都会出现如何使用求解器的内容,供读者酌情选学或自学。由 于本书中主要将求解器当作工具来用,因此只在目录中列出相关内容的标题(以便为读者提 供一个循序渐进的向导),而具体内容则放到了光盘上,同时其内在的算法和原理将在其他教 材(参见袁驷编著,《程序结构力学》)中介绍。 在结构力学的学习中,求解器可以提供多种功用和帮助,有待于读者去熟悉和发现,这 里只列举几点。 1.结构计算求解的利器 求解器首先是一个计算求解的强有效的工具。犹如计算器的功能是做数值计算,求解器 的功能是做结构计算。任意平面结构输进求解器,鼠标一点,变形图和内力图即出。 2.体验大结构的受力性能 求解器并非专为课堂上小问题的求解而设计的。有了求解器,即便是结构力学的初学者, 也可以用求解器来方便地求解大结构的各类问题,以增强对大结构受力特性的直观感受和切 实体验。 3.求解传统方法难以求解的问题 本书中的传统方法并非都适用于精确求解大型实际结构,例如,几何构造分析的三角形 法则只适用于符合该法则的体系,超静定结构分析方法大都假定结构无轴向变形等等:而求 解器则全无这些限制。 4.演示和作图的工具 求解器可以用静态图形显示结构简图、变形图、内力图,还可以用动画显示机构模态、 振型等动态图形。利用复制到剪贴板的功能,可以将结构简图、变形图、内力图以点阵图或 矢量图的形式粘贴到MS Word或MS PowerPoint中,并可以方便地进行再编辑。 5.让求解器当教师答疑 几何构造分析选不出刚片吗?静定桁架的截面法剖不出截面单杆?静定组合结构分析不 知道从哪里开始下手?求解器的智能求解功能可以将求解步骤一步步地演示出来。 6.定性分析的数值试验平台 将桁架的结点都设为刚结点,看看弯曲应力是不是次应力?对于多层刚架,强梁弱柱和 强柱弱梁的受力特点有什么不同?梁的剪切变形是否小到可以忽略?这些都可以用求解器来 做具体的试验和验证。 1
§1-6 结构力学求解器简介 §1-6 结构力学求解器简介 把繁琐交给求解器,我们留下创造力! 本书所附的《结构力学求解器》(SM Solver for Windows,简称求解器)是一个方便好用 的计算机辅助分析计算软件(见所附光盘),其求解内容涵盖了本教材中所涉及的几乎所有问 题,包括:二维平面结构(体系)的几何组成、静定、超静定、位移、内力、影响线、自由 振动、弹性稳定、极限荷载等。对所有这些问题,求解器全部采用精确算法给出精确解答。 有关求解器的安装和使用简介可以参阅软件光盘上的相关文档和联机帮助,这里不作详 细讲解。本书中各个章节中大都会出现如何使用求解器的内容,供读者酌情选学或自学。由 于本书中主要将求解器当作工具来用,因此只在目录中列出相关内容的标题(以便为读者提 供一个循序渐进的向导),而具体内容则放到了光盘上,同时其内在的算法和原理将在其他教 材(参见袁驷编著,《程序结构力学》)中介绍。 在结构力学的学习中,求解器可以提供多种功用和帮助,有待于读者去熟悉和发现,这 里只列举几点。 1. 结构计算求解的利器 求解器首先是一个计算求解的强有效的工具。犹如计算器的功能是做数值计算,求解器 的功能是做结构计算。任意平面结构输进求解器,鼠标一点,变形图和内力图即出。 2. 体验大结构的受力性能 求解器并非专为课堂上小问题的求解而设计的。有了求解器,即便是结构力学的初学者, 也可以用求解器来方便地求解大结构的各类问题,以增强对大结构受力特性的直观感受和切 实体验。 3. 求解传统方法难以求解的问题 本书中的传统方法并非都适用于精确求解大型实际结构,例如,几何构造分析的三角形 法则只适用于符合该法则的体系,超静定结构分析方法大都假定结构无轴向变形等等;而求 解器则全无这些限制。 4. 演示和作图的工具 求解器可以用静态图形显示结构简图、变形图、内力图,还可以用动画显示机构模态、 振型等动态图形。利用复制到剪贴板的功能,可以将结构简图、变形图、内力图以点阵图或 矢量图的形式粘贴到 MS Word 或 MS PowerPoint 中,并可以方便地进行再编辑。 5. 让求解器当教师答疑 几何构造分析选不出刚片吗?静定桁架的截面法剖不出截面单杆?静定组合结构分析不 知道从哪里开始下手?求解器的智能求解功能可以将求解步骤一步步地演示出来。 6. 定性分析的数值试验平台 将桁架的结点都设为刚结点,看看弯曲应力是不是次应力?对于多层刚架,强梁弱柱和 强柱弱梁的受力特点有什么不同?梁的剪切变形是否小到可以忽略?这些都可以用求解器来 做具体的试验和验证。 1
S2-4在求解器中输入平面结构体系 2-4在求解器中输入平面结构体系 本节介绍如何在求解器中输入结构体系。 在求解器中定义结构体系要满足数值化和可视化两方面的要求,另外还要有较好的人机 交互功能。如图2-4-1所示的几个铰支座,从计算角度上看都是等效的,但在图形显示上却不 同,因此需要补充一些有关的数据信息。另外,对于各类组合结点,在求解器中也要求能够 比较方便地定义。因此,在求解器中如何定义一个结构体系是一个很基本的问题。 图2-41较支座的不同图形显示 1.坐标系 求解器中的坐标系遵循以下的统一定义: 对于整个结构体系,规定一个整体坐标系, 用(x,y)表示,如图2-4-2所示。整体坐标系中, x和y方向(即水平和竖直方向)的线位移分别 记为u和v,均规定与整体坐标正方向相同为正: 角位移0规定由x向y方向转动为正①。 图2-4-2整体坐标和局部坐标 对于结构体系的每一个杆件单元,建立一个局部坐标系,用(:,可)表示②。在局部坐标系 中,下和少方向的线位移分别记为和下,相应的力记为F和F,均规定与局部坐标正方向 相同为正:角位移日和相应的力矩M也规定由x向下方向转动为正。 局部坐标系和整体坐标系之间要满足一定的关系。图2-4-2所示为一个典型的杆件单元。 为单元规定一个方向,即指定一个始端1和一个末端2。单元方向也可用轴向的箭头来表示: 箭头从始端指向末端。规定局部坐标的原点取在杆端1,下轴指向杆端2。下轴的选取应与整 体坐标转向一致,即当x轴向y轴方向转心角度使得x轴与x轴同向后,y轴应与y轴同向。 按照这样的定义,角位移和力矩在局部坐标下和整体坐标下方向是一致的,所以没有必要加 以区分。 2.虚拟刚结点 首先引入的一个概念是虚拟刚结点。 用求解器输入一个结构体系时,首先输入一些结点。这些结点被理解为是虚拟刚结点, 即将每一个结点看作是一个具有3个自由度(两个平移,一个转动)的小刚体。虚拟刚结点 是杆件之间连接的中介。在随后定义杆件单元时,不是去定义单元杆端和杆端的连接,而是 定义杆端与虚拟刚结点的连接。每个杆端(整体坐标中)有三个位移自由度,为它们各自建 立一个连接码,用0和1表示:0表示不连接,1表示连接。这样,若杆端的连接码为(1,1,1), ①按顺时针或逆时针表示角位移正方向容易引起混乱。如图242中角位移逆时针为正,但若将y轴取为向下为正(x轴方 向不变),则角位移变为顺时针为正。 ②在符号表示上,通常的规则是局部坐标系中的量比整体坐标系中的量在顶上多加一横线
§2-4 在求解器中输入平面结构体系 §2-4 在求解器中输入平面结构体系 本节介绍如何在求解器中输入结构体系。 在求解器中定义结构体系要满足数值化和可视化两方面的要求,另外还要有较好的人机 交互功能。如图 2-4-1 所示的几个铰支座,从计算角度上看都是等效的,但在图形显示上却不 同,因此需要补充一些有关的数据信息。另外,对于各类组合结点,在求解器中也要求能够 比较方便地定义。因此,在求解器中如何定义一个结构体系是一个很基本的问题。 图2-4-1 铰支座的不同图形显示 1. 坐标系 求解器中的坐标系遵循以下的统一定义: 对于整个结构体系,规定一个整体坐标系, 用(x, y) 表示,如图 2-4-2 所示。整体坐标系中, x 和 方向(即水平和竖直方向)的线位移分别 记为u和 ,均规定与整体坐标正方向相同为正; 角位移 y v θ 规定由 x 向 y 方向转动为正①。 图 2-4-2 整体坐标和局部坐标 对于结构体系的每一个杆件单元,建立一个局部坐标系,用(x, y) 表示②。在局部坐标系 中, x 和 y 方向的线位移分别记为u 和 v ,相应的力记为 Fx 和 Fy ,均规定与局部坐标正方向 相同为正;角位移θ 和相应的力矩 M 也规定由 x 向 y 方向转动为正。 局部坐标系和整体坐标系之间要满足一定的关系。图 2-4-2 所示为一个典型的杆件单元 e。 为单元规定一个方向,即指定一个始端 1 和一个末端 2。单元方向也可用轴向的箭头来表示: 箭头从始端指向末端。规定局部坐标的原点取在杆端 1, x 轴指向杆端 2。 y 轴的选取应与整 体坐标转向一致,即当 x 轴向 y 轴方向转α 角度使得 x 轴与 x 轴同向后, y 轴应与 y 轴同向。 按照这样的定义,角位移和力矩在局部坐标下和整体坐标下方向是一致的,所以没有必要加 以区分。 2. 虚拟刚结点 首先引入的一个概念是虚拟刚结点。 用求解器输入一个结构体系时,首先输入一些结点。这些结点被理解为是虚拟刚结点, 即将每一个结点看作是一个具有 3 个自由度(两个平移,一个转动)的小刚体。虚拟刚结点 是杆件之间连接的中介。在随后定义杆件单元时,不是去定义单元杆端和杆端的连接,而是 定义杆端与虚拟刚结点的连接。每个杆端(整体坐标中)有三个位移自由度,为它们各自建 立一个连接码,用 0 和 1 表示:0 表示不连接,1 表示连接。这样,若杆端的连接码为(1,1,1), ① 按顺时针或逆时针表示角位移正方向容易引起混乱。如图 2-4-2 中角位移逆时针为正,但若将 y 轴取为向下为正( x 轴方 向不变),则角位移变为顺时针为正。 ② 在符号表示上,通常的规则是局部坐标系中的量比整体坐标系中的量在顶上多加一横线。 1

$24在求解器中输入平面结构体系 则该杆端与虚拟刚结点为刚结:(1,1,0)为铰结:(1,0,0)为水平链杆连接:(0,1,1)则为定向(水 平滑动)连接,等等。 下面结合图2-4-3~2-4-4中的例子来讨论。 (1,1,1)(1,1,1) (1,1,1)(1,1,1) (1,1,1) (1,1,1) → (a) (6) 图2-4-3刚结点的连接 4.1D.10 (1,1,1)(1,1,0) (1,1,1) → (1,1,1) (a) (b) 图24-4组合结点的连接 图2-4-3是刚结点的连接示例,其中图2-4-3a中定义了一个虚拟刚结点和杆端的连接码: 各个杆端与虚拟刚结点连接后成为图2-4-3b的形式,去除虚拟刚结点后的效果为图2-4-3c所 示的刚结点:求解器中显示的是最后的图2-4-3C。图2-44是组合结点的连接示例,同理,无 需重复。铰结点是最常见的结点之一,其连接示例在图2-4-5中给出。这里,共有四种连接方 式,都等效于图2-4-5e中的饺结点,通常采用图2-4-5a所示方式即可。值得一提的是,如果 将三个杆件固定住,图2-4-5b~d中的虚拟刚结点也随之被固定不动,而图2-4-5a中的虚拟刚 结点仍然存在一个转动自由度,可以绕结点自由转动。这是一种结点转动机构,在求解器中 会自动将其排除不计①。结点机构实际上也潜存于经典的结构力学之中,如将一个集中力矩加 在铰结点上,便可以理解为加在了结点机构上(犹如加在可自由转动的销钉上),是无意义的。 (a) (b) (1,1,0) (1,1,0) (1,1,1) (1,1,0) 00 (1,1,0) (1,1,0) (c) (1,1,0) (1,1,1) (1,1,0) (1,1,0) 0 (1,1,0) (1,1,1) e 图2-4-5铰结点的连接 综上所述,求解器中单元对话框中的“连接方式”是指各杆端与虚拟刚结点的连接方式, 而不是杆件之间的连接方式。这样,各杆件通过虚拟刚结点这一中介再和其他杆件间接地连 ①极限分析中的结点机构将被视为破杯机构的一种。 2
§2-4 在求解器中输入平面结构体系 则该杆端与虚拟刚结点为刚结;(1,1,0)为铰结;(1,0,0)为水平链杆连接;(0,1,1)则为定向(水 平滑动)连接,等等。 下面结合图 2-4-3~2-4-4 中的例子来讨论。 图 2-4-3 刚结点的连接 图 2-4-4 组合结点的连接 图 2-4-3 是刚结点的连接示例,其中图 2-4-3a 中定义了一个虚拟刚结点和杆端的连接码; 各个杆端与虚拟刚结点连接后成为图 2-4-3b 的形式,去除虚拟刚结点后的效果为图 2-4-3c 所 示的刚结点;求解器中显示的是最后的图 2-4-3c。图 2-4-4 是组合结点的连接示例,同理,无 需重复。铰结点是最常见的结点之一,其连接示例在图 2-4-5 中给出。这里,共有四种连接方 式,都等效于图 2-4-5e 中的铰结点,通常采用图 2-4-5a 所示方式即可。值得一提的是,如果 将三个杆件固定住,图 2-4-5b~d 中的虚拟刚结点也随之被固定不动,而图 2-4-5a 中的虚拟刚 结点仍然存在一个转动自由度,可以绕结点自由转动。这是一种结点转动机构,在求解器中 会自动将其排除不计①。结点机构实际上也潜存于经典的结构力学之中,如将一个集中力矩加 在铰结点上,便可以理解为加在了结点机构上(犹如加在可自由转动的销钉上),是无意义的。 图 2-4-5 铰结点的连接 综上所述,求解器中单元对话框中的“连接方式”是指各杆端与虚拟刚结点的连接方式, 而不是杆件之间的连接方式。这样,各杆件通过虚拟刚结点这一中介再和其他杆件间接地连 ① 极限分析中的结点机构将被视为破坏机构的一种。 2