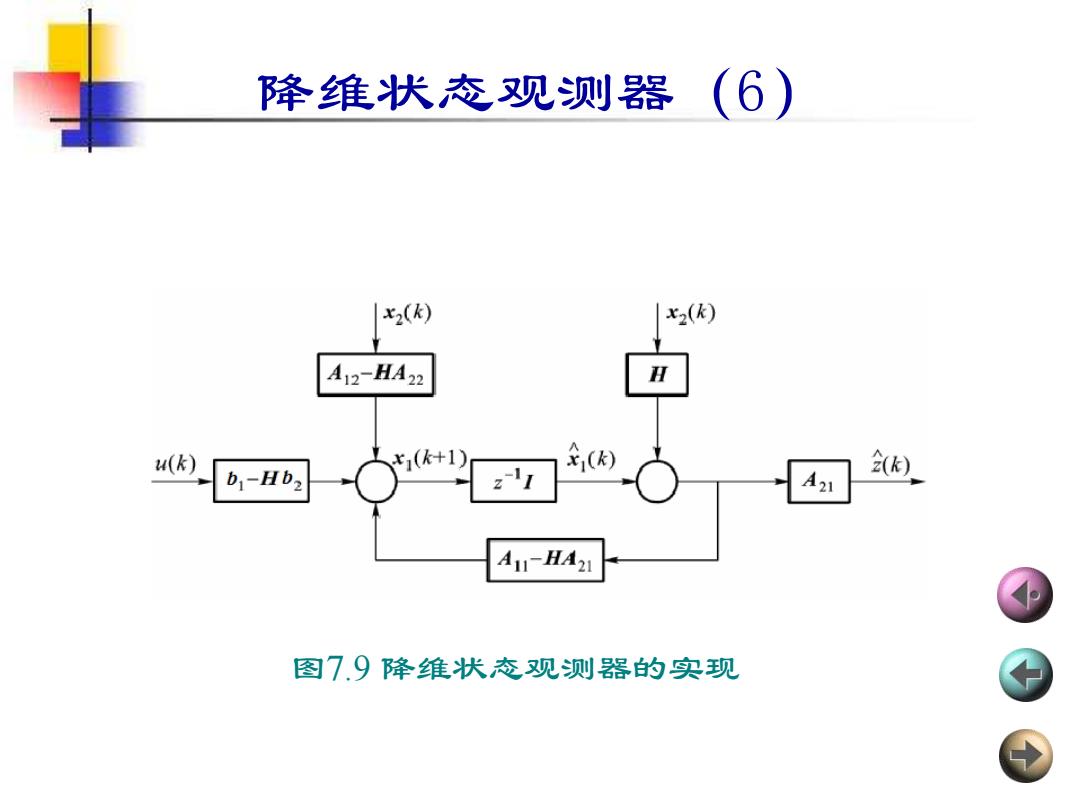
降维状态观测器 (6) 2(K) (k) A12-HA22 (k) (k+1) () b-HD2 A21 ) Au-HA2 图79降维状态观测器的实现
图7.9 降维状态观测器的实现 降维状态观测器(6)
7.6应用状态观测器的状态反馈系统 以单输入单输出系统为例 x(k+1)=Ax(k)+bu(k) y()=c() 该系统完全能控完全能观测。设计的问题是: 1.用状态估计值反馈与用真实状态反馈系统性能是否 一致? 2.状态反馈增益矩阵K和观测器输出误差反馈矩阵H如 何设计?
7.6 应用状态观测器的状态反馈系统 以单输入单输出系统为例 该系统完全能控完全能观测。设计的问题是: 1. 用状态估计值反馈与用真实状态反馈系统性能是否 一致? 2. 状态反馈增益矩阵K和观测器输出误差反馈矩阵H如 何设计? + = + = ( 1) ( ) ( ) ( ) ( ) k A k bu k y k c k x x x
应用状态观测器的状态反馈系统 问题1 用x()反馈时,闭环系统为 x(k+1)=(A-bK)x(2)+bu(k) 其中,v()为参考输入 用(反馈时,状态观测器为 x(k+1)=Ac()+bu()+H[y(k)-(k)] =(A-HC)(k)+bu(k)+Hy(k)
应用状态观测器的状态反馈系统 问题1 用x(k)反馈时,闭环系统为 其中,v(k)为参考输入 用 反馈时,状态观测器为 x x ( 1) ( ) ( ) ( ) k A bK k bv k + = − + + = + + − = − + + ˆ( 1) ( ) ( ) [ ( ) ( )] ˆ ˆ ( ) ( ) ( ) ( ) ˆ k A k bu k H y k y k A HC k bu k Hy k x x x x ˆ( ) k
应用状态观测器的状态反馈系统 闭环系统为 x(k+1)=Ax(k)+b[v(k)-K(k)] =Ax(k)+bv(k)-bKx(k)+bKx(k)-bKx(k) (A-bK)x(k)+bK(x(k)-x(k))+bu(k) (A-bK)x(k)+bKx(k)+bv(k)
应用状态观测器的状态反馈系统 闭环系统为 + = + − = + − + − = − + − + = − + + ( 1) ( ) [ ( ) ( )] ˆ ( ) ( ) ( ) ( ) ( ) ˆ ( ) ( ) ( ( ) ( )) ( ) ˆ ( ) ( ) ( ) ( ) k A k b v k K k A k bv k bK k bK k bK k A bK k bK k k bv k A bK k bK k bv k x x x x x x x x x x x x
应用状态观测器的状态反溃系统 若心(0)=(0),闭环系统系数矩阵未变,均为A-bK,这 种情况下,()反馈系统与x(k反馈系统完全相同。 若x(0)≠(0),()反馈系统比x()反馈系统多了一个输 入量bKx(k) 观测器设计过程中对H的选择保证bK心() 对系统来说相当于一个很快衰减的扰动量,只对系统 产生瞬态的影响
应用状态观测器的状态反馈系统 若 ,闭环系统系数矩阵未变,均为A-bK,这 种情况下, 反馈系统与x(k)反馈系统完全相同。 若 , 反馈系统比x(k)反馈系统多了一个输 入量 ,观测器设计过程中对H的选择保证 对系统来说相当于一个很快衰减的扰动量,只对系统 产生瞬态的影响。 x x (0) (0) = ˆ x ˆ( ) k x x (0) (0) ˆ x ˆ( ) k bK k x( ) bK k x( )