振铃现象及其消除 所谓振铃(Ringing)现象,是指数字控制器 的输出以二分之一采样频率大幅度衰减的振荡。 振铃现象中的振荡是衰减的。由于被控对象中 惯性环节的低通特性,使得这种振荡对系统的 输出几乎无任何影响。但是振铃现象却会增加 执行机构的磨损,在有交互作用的多参数控制 系统中,振铃现象还有可能影响到系统的稳定 性o
振铃现象及其消除 所谓振铃(Ringing)现象,是指数字控制器 的输出以二分之一采样频率大幅度衰减的振荡。 振铃现象中的振荡是衰减的。由于被控对象中 惯性环节的低通特性,使得这种振荡对系统的 输出几乎无任何影响。但是振铃现象却会增加 执行机构的磨损,在有交互作用的多参数控制 系统中,振铃现象还有可能影响到系统的稳定 性
振铃现象的分析 系统的输出Y(2)和数字控制器的输出U(2)间有下 列关系 Y(=G(U( 系统的输出Y(z)和输入函数R(2)之间有下列关系 Y(z)=Φ(z)R(z) 由上面两式得到数字控制器的输出2)与输入函 数的R(z)之间的关系为 U(a) Φ(2) R(z) G(2)
振铃现象的分析 系统的输出Y(z)和数字控制器的输出U(z)间有下 列关系 系统的输出Y(z)和输入函数R(z)之间有下列关系 由上面两式得到数字控制器的输出U(z)与输入函 数的R(z)之间的关系为 Y(z) = G(z)U(z) Y z z R z ( ) ( ) ( ) = = ( ) ( ) ( ) ( ) U z z R z G z
振铃现象的分析 定义 K.(z)= Φ(2) G(z 显然 UU(z)=K(2)R(2) K()表达了数字控制器的输出与输入函数在闭环时的关 系,是分析振铃现象的基础
振铃现象的分析 定义 显然 Ku (z)表达了数字控制器的输出与输入函数在闭环时的关 系,是分析振铃现象的基础 。 u = ( ) ( ) ( ) z K z G z = u U z K z R z ( ) ( ) ( )
振铃现象的分析 对于单位阶跃输入函数R(z)片1/(1-z),含有 极点2一1,如果K(2)的极点在z平面的负实轴上, 且与=一1点相近,那么数字控制器的输出序列 ()中将含有这两种幅值相近的瞬态项,而且瞬 态项的苻号在不同时刻是不同的。当两瞬态项 符号相同时,数字控制器的输出控制作用加强, 符号相反时,控制作用减弱,从而造成数字控 制器的输出序列大幅度波动。分析K(2)在z平面 负实轴上的极点分布情况,就可得出振铃现象 的有关结论
振铃现象的分析 对于单位阶跃输入函数R(z)=1/(1-z -1 ),含有 极点z=1,如果Ku (z)的极点在z平面的负实轴上, 且与z=-1点相近,那么数字控制器的输出序列 u(k)中将含有这两种幅值相近的瞬态项,而且瞬 态项的符号在不同时刻是不同的。当两瞬态项 符号相同时,数字控制器的输出控制作用加强, 符号相反时,控制作用减弱,从而造成数字控 制器的输出序列大幅度波动。分析Ku (z)在z平面 负实轴上的极点分布情况,就可得出振铃现象 的有关结论
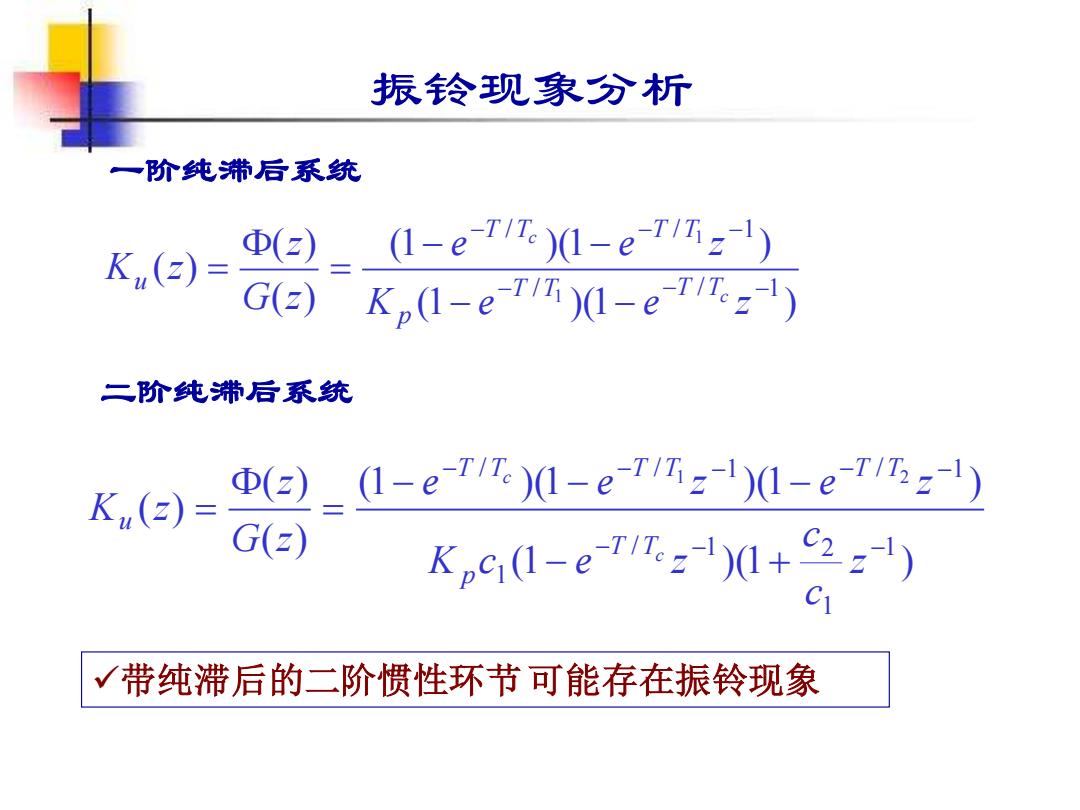
振铃现象分析 一阶纯滞后系统 Φ(2) (1-eT1.)1-eT13z1) K(z)= G(=)K(1-e-Tm)(1-e-Ti=-) 二阶纯滞后系统 Φ(z)( (1-e-TIT)(1-e-Tinz-1)(1-e-T/nz-1) K(= G( Kp9(1-e7z11+2z1) √带纯滞后的二阶惯性环节可能存在振铃现象
振铃现象分析 (1 )(1 ) (1 )(1 ) ( ) ( ) ( ) / / 1 / / 1 1 1 − − − − − − − − − − = = K e e z e e z G z z K z c c T T T T p T T T T u (1 ) (1 ) (1 ) (1 ) (1 ) ( ) ( ) ( ) 1 1 / 1 2 1 / / 1 1 / 2 1 − − − − − − − − − + − − − = = z c c K c e z e e z e z G z z K z c c T T p T T T T T T u 一阶纯滞后系统 二阶纯滞后系统 ✓带纯滞后的二阶惯性环节可能存在振铃现象