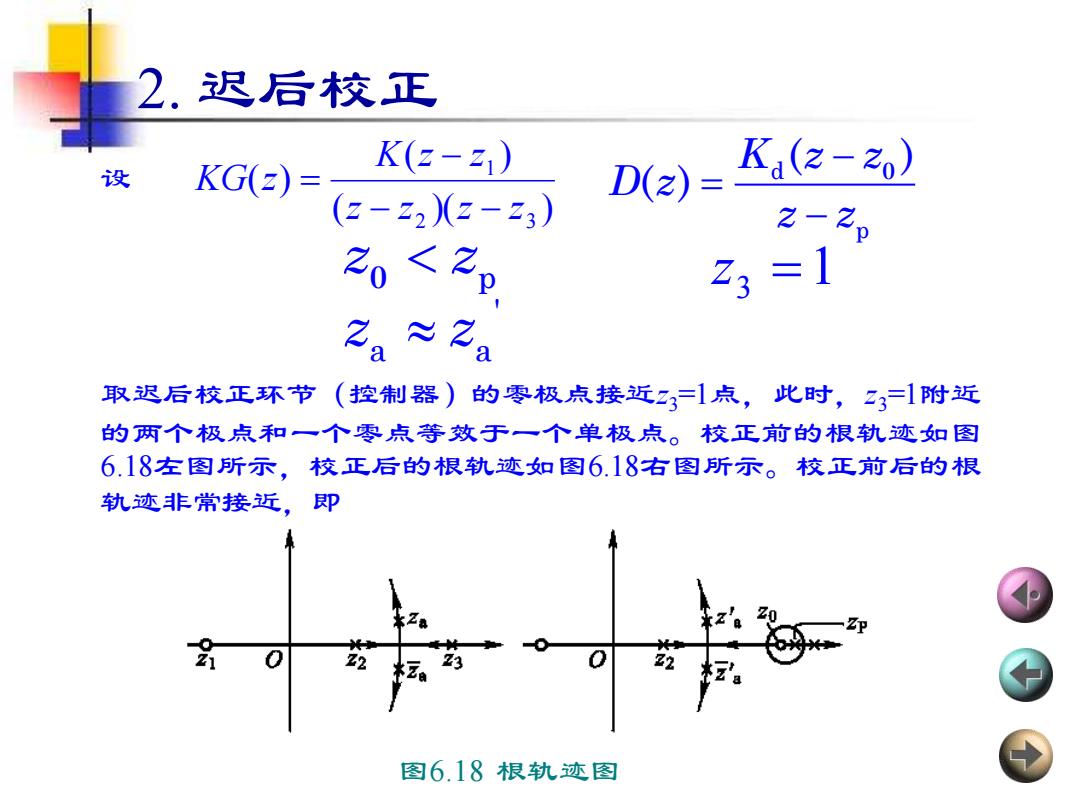
2.迟后校正 K(z-) 设 KG(= D()=K2-2) (z-22)(z-3) 20<2p 23=1 2 ≈2a 取迟后校正环节(控制器)的零极点接近z3=1点,此时,23=1附近 的两个极点和一个零点等效于一个单极点。校正前的根轨迹如图 6.18左图所示,校正后的根轨迹如图6.18右图所示。校正前后的根 轨迹非常接近,即 Z2 23 图6.18根轨迹图
2. 迟后校正 设 取迟后校正环节(控制器)的零极点接近z3=1点,此时,z3=1附近 的两个极点和一个零点等效于一个单极点。校正前的根轨迹如图 6.18左图所示,校正后的根轨迹如图6.18右图所示。校正前后的根 轨迹非常接近,即 ( )( ) ( ) ( ) 2 3 1 z z z z K z z KG z − − − = − = − d 0 p ( ) ( ) K z z D z z z z z 0 p 1 z3 = ' a a z z 图6.18 根轨迹图
迟后校正 此时有 K.D(z)G(2)= K.Ka(-20)(z-2) (2-2)(2-222-23) 其中,K是系统的增益。由于 2a Za ≈ 所以有 是造 Ka2-202-2 Kd Za -21
迟后校正 此时有 其中,Kc是系统的增益。由于 所以有 − − = − − − c d 0 1 c p 2 3 ( )( ) ( ) ( ) ( )( )( ) K K z z z z K D z G z z z z z z z ' a a z z − − − − − = − − − ' ' ' a p a 2 a 3 a 2 a 3 c ' ' d a 0 a 1 d a 1 z z z z z z z z z z K K z z z z K z z
迟后校正 K是没有校正前极点在2处的系统增益,即 K=2-e-2剧 2-2 则由上两式可得 K K 由于K<1时,所以校正后的系统增益K大于校正前 的增益K。 系统稳态特性得到了改善
迟后校正 Ku是没有校正前极点在za处的系统增益,即 则由上两式可得 由于Kd<1时,所以校正后的系统增益Kc大于校正前 的增益Ku。系统稳态特性得到了改善。 − − = − 2 3 u 1 z z z z K z z u c d K K K
迟后铰正设计步骤 选择期望的闭环极点二a,计算对应的增益K, V 根据给定的稳态性能指标要求,确定校正后系统增益【。 √计算迟后补偿器的增益 Ka K K。 √选择迟后补偿器的极点2p,1 使其接近=1点 √计算迟后补偿器的零点 1一2p 20=1- Ka 例6.5
迟后校正设计步骤 = u d c K K K − = − p 0 d 1 1 z z K ✓ 选择期望的闭环极点za,计算对应的增益Ku ✓ 根据给定的稳态性能指标要求,确定校正后系统增益Kc ✓计算迟后补偿器的增益 ✓ 选择迟后补偿器的极点zp,使其接近z=1点 ✓ 计算迟后补偿器的零点 例6.5
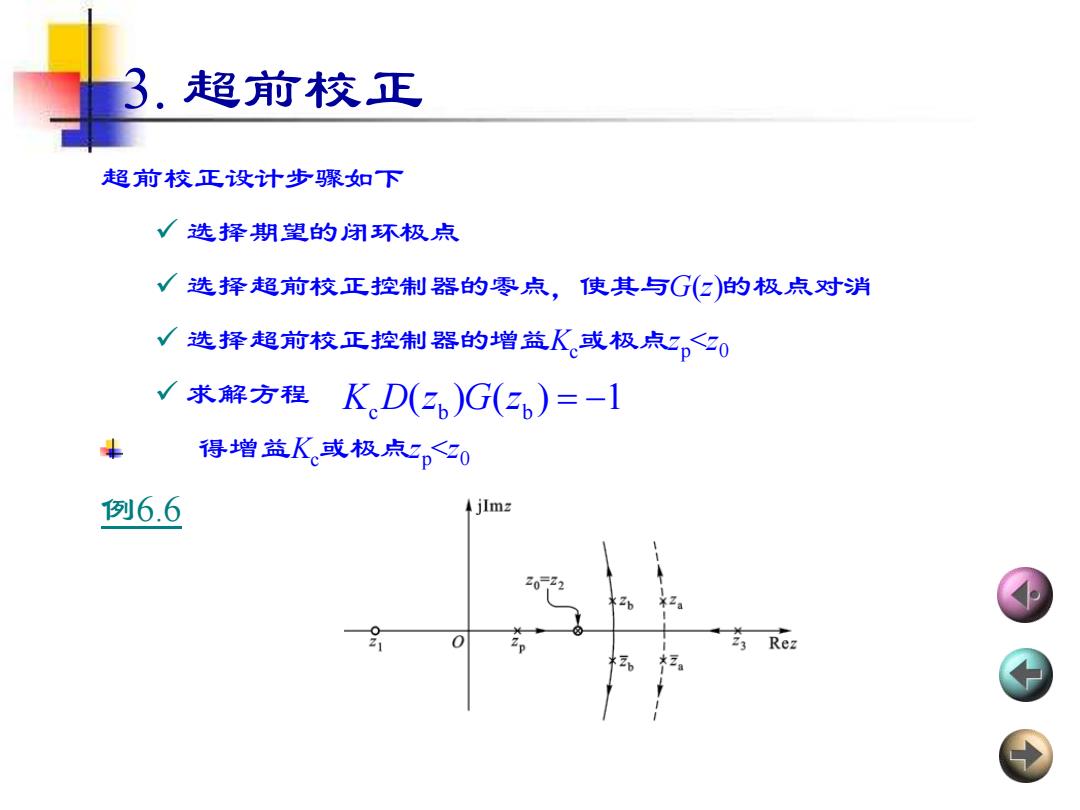
3.超前校正 超前校正设计步骤如下 √选择期望的闭环极点 √选择超前校正控制器的零点,, 使其与G(z)的极点对消 选择超前校正控制器的增益K或极点二<0 √求解方程K.D(zb)G(zn)=-1 得增益K或极点p<0 例6.6 jImz 20=22 Rez
3. 超前校正 c b b K D z G z ( ) ( ) 1 = − 超前校正设计步骤如下 ✓ 选择期望的闭环极点 ✓ 选择超前校正控制器的零点,使其与G(z)的极点对消 ✓ 选择超前校正控制器的增益Kc或极点zp <z0 ✓ 求解方程 得增益Kc或极点zp <z0 例6.6