2.电流环、速度环 数字控制器设计 在典型的双闭环晶闸管直流调速系统中,电流环调节器和速 度环调节器均采用PI调节器。其传递函数为 U(s) E(s) =K(1+ 由第四章数字控制器的模拟化设计方法,可得PI控制算式为 u(k)=u(k-1)+ae(k)-ae(k-1) a=K,+7,a=K, 采样周期T,按经验公式ω户10ω确定。其中,ω为采样角频率, ω。为系统开环频率特性的截止频率
2.电流环、速度环 数字控制器设计 在典型的双闭环晶闸管直流调速系统中,电流环调节器和速 度环调节器均采用PI调节器。其传递函数为 由第四章数字控制器的模拟化设计方法,可得PI控制算式为 采样周期T,按经验公式ω≈10ωc确定。其中,ω为采样角频率, ωc为系统开环频率特性的截止频率。 ) 1 (1 ( ) ( ) I p T s K E s U s = + ( ) ( 1) ( ) ( 1) u k = u k − + a0 e k − a1 e k − 1 p I 0 p (1 ), a K T T a = K + =
电流环、速度环 数字控制器设计 由于电流环调节器和速 取a,e(k) 度环调节器均采用PI调节器, 因此可以编制一个PI运算子程 计算aoe() 序,调用前将有关参数及偏 取a1,e(k-1) 差数据送入相应单元,则两 计算a1e(k-l) 个环可共用一个子程序。PI运 算子程序流程图如图8.4所示。 取u(k-1) 计算 u(k)=u(k-1)+aoe(k) -a1e(k-1) e(k)-e(k-1) ()*(k-1) 子程序返回 图8.4PI运算子程序流程图
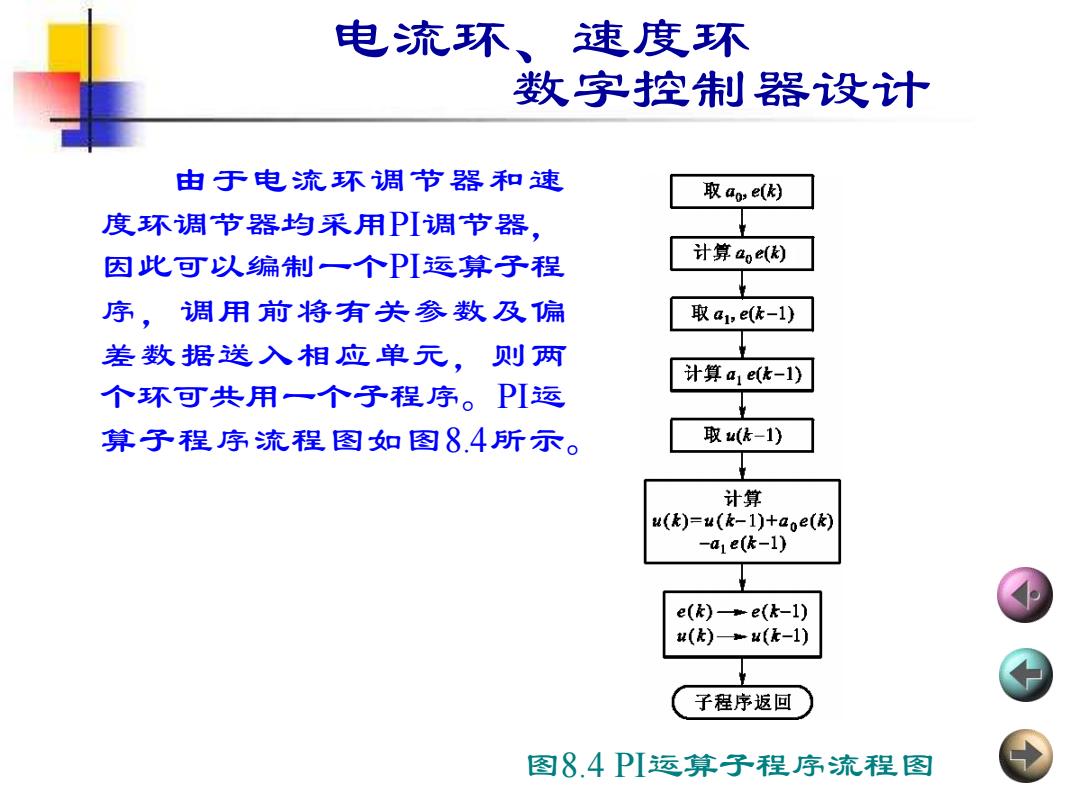
电流环、速度环 数字控制器设计 由于电流环调节器和速 度环调节器均采用PI调节器, 因此可以编制一个PI运算子程 序,调用前将有关参数及偏 差数据送入相应单元,则两 个环可共用一个子程序。PI运 算子程序流程图如图8.4所示。 图8.4 PI运算子程序流程图
3,晶闸管数字触发器设计 晶闸管三相全控桥式整流电路及线电压曲线如图8,5 所示。t1~t6为自然换相点。取线电压wV从负半波到正半 波的过零点(1)作为同步基准点。根据波形图可分析出 各晶闸管的触发时刻(对应于控制角=0。)及触发顺 序。 0 Hwu uwy HUV HUW HVW HVU WwU 本D1本D3本D 12456 Uo Vo Wo- 本D4本D6本D2 (a) (b) 图8.5三相全控桥式整流电路及线电压曲线
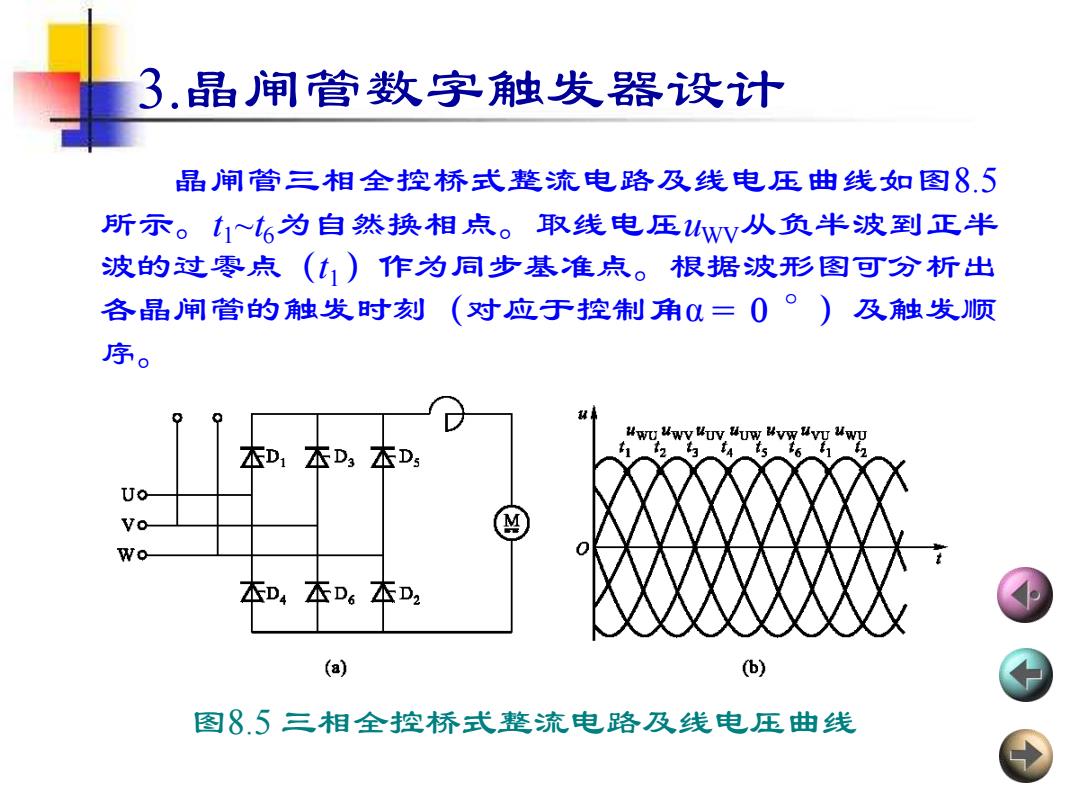
3.晶闸管数字触发器设计 晶闸管三相全控桥式整流电路及线电压曲线如图8.5 所示。t1~t6为自然换相点。取线电压uWV从负半波到正半 波的过零点(t1)作为同步基准点。根据波形图可分析出 各晶闸管的触发时刻(对应于控制角α=0°)及触发顺 序。 图8.5 三相全控桥式整流电路及线电压曲线
晶闸管数字触发器设计 计算机对电流调节器的输出进行计算,以同步基 准点为参考点,算出晶闸管控制角的大小,再通过定 时器按触发角大小及图8.6的顺序,准确的给各个晶闸管 发出触发脉冲,这就是数字触发器的任务。 ta Di DA D2 D4 图8.6晶闸管的触发时刻及触发顺序
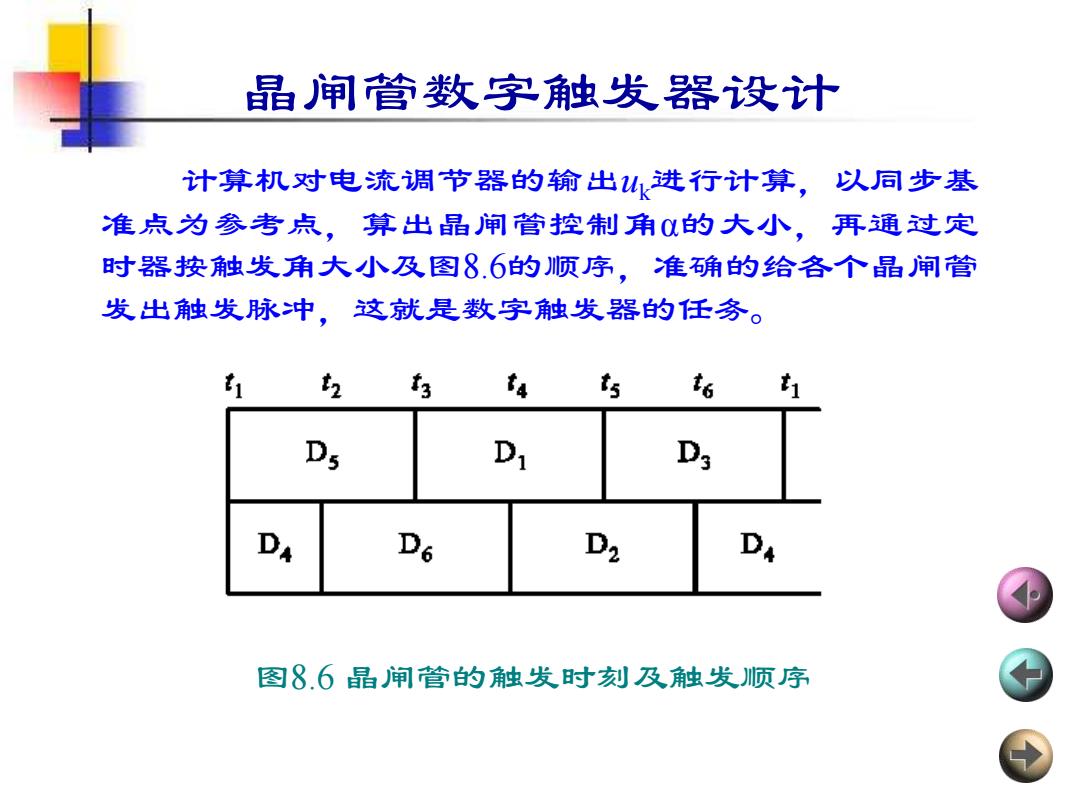
晶闸管数字触发器设计 计算机对电流调节器的输出uk进行计算,以同步基 准点为参考点,算出晶闸管控制角α的大小,再通过定 时器按触发角大小及图8.6的顺序,准确的给各个晶闸管 发出触发脉冲,这就是数字触发器的任务。 图8.6 晶闸管的触发时刻及触发顺序
绝对触发方式设计 数字触发器的一种方法 控制算法 采用绝对触发方式,触发角是滞后自然换 相点的角度。为了用一个定时器完成对触发角的定时, 定时时间不能超过3.335。所以,需引进一个新的变量 '作为定时角度,其定义如下 o&mn≤a≤60时,'=a 60°<≤120时,0=a-60 120°<a≤amx时,a'=u-120° 其中min和0max是触发角的最小值和最大值
绝对触发方式设计 数字触发器的一种方法 ✓ 控制算法 采用绝对触发方式,触发角α是滞后自然换 相点的角度。为了用一个定时器完成对触发角的定时, 定时时间不能超过3.33ms。所以,需引进一个新的变量 α'作为定时角度,其定义如下 其中αmin和αmax是触发角的最小值和最大值。 120 120 60 120 60 60 max min = − = − = 时, 时, 时