第六章计算机控制系统的 直接设计法 ☐6.1概述 口6.2最少拍控制系统设计 口 6,3纯滞后对象的控制算法 ☐6.4设计数字控制器的根轨迹法 口6,5数字控制器的频域设计法
第六章 计算机控制系统的 直接设计法 ❑ 6.1 概述 ❑ 6.2 最少拍控制系统设计 ❑ 6.3 纯滞后对象的控制算法 ❑ 6.4 设计数字控制器的根轨迹法 ❑ 6.5 数字控制器的频域设计法
6.1概述 等效离散化设计方法存在以下缺陷: (1)必须以采样周期足够小为前提。(2)没有反映采样点之间的性能。 特别是当采样周期过大,除有可能造成控制系统不稳定外,还使 系统长时间处于“开环”、失控状态。因此,系统的调节品质变 坏。 (3)等效离散化设计所构造的计算机控制系统,其性能指标只能接近于 原连续系统(只有当采样周期T=0时,计算机控制系统才能完全等 同于连续系统),而不可能超过它。因此,这种方法也被称之为近 似设计。 计算机控制系统的直接设计法,是先将被控对象和保持器组成 的连续部分离散化,根据已知的被控对象,针对控制系统的性能 指标要求及其他约束条件,确定理想的闭环脉冲传递函数;确定 数字控制器的脉冲传递函数D(Z);根据D(Z)编制控制算法程序,用 计算机来实现。 直接设计法的优点是 不存在采样周期必须足够小的限制 可以考虑采样点之间的性能 可以得到比相应连续系统更好的性能
6.1 概述 ➢ 等效离散化设计方法存在以下缺陷: (1)必须以采样周期足够小为前提。 (2)没有反映采样点之间的性能。 特别是当采样周期过大,除有可能造成控制系统不稳定外,还使 系统长时间处于“开环”、失控状态。因此,系统的调节品质变 坏。 (3)等效离散化设计所构造的计算机控制系统,其性能指标只能接近于 原连续系统(只有当采样周期T=0时,计算机控制系统才能完全等 同于连续系统),而不可能超过它。因此,这种方法也被称之为近 似设计。 计算机控制系统的直接设计法,是先将被控对象和保持器组成 的连续部分离散化,根据已知的被控对象,针对控制系统的性能 指标要求及其他约束条件,确定理想的闭环脉冲传递函数;确定 数字控制器的脉冲传递函数D(z);根据D(z)编制控制算法程序,用 计算机来实现。 ➢ 直接设计法的优点是 ✓ 不存在采样周期必须足够小的限制 ✓ 可以考虑采样点之间的性能 ✓ 可以得到比相应连续系统更好的性能
6,2最少拍控制系统设计 最少拍设计,是指系统在典型输入信号(如 阶跃信号,速度信号,加速度信号等)作用下, 经过最少拍(有限拍),使系统输出的稳态误差为 零0 稳定、不包含纯滞后环节的广义对象的最 少拍控制器设计 任意广义对象的最少拍控制器设计 最少拍无纹波控制器设计 ☐具有阻尼权因子的最少拍控制系统设计
6.2 最少拍控制系统设计 最少拍设计,是指系统在典型输入信号(如 阶跃信号,速度信号,加速度信号等)作用下, 经过最少拍(有限拍),使系统输出的稳态误差为 零。 ❑ 稳定、不包含纯滞后环节的广义对象的最 少拍控制器设计 ❑ 任意广义对象的最少拍控制器设计 ❑ 最少拍无纹波控制器设计 ❑ 具有阻尼权因子的最少拍控制系统设计
1.稳定、不包含纯带后环节的 广义对象的最少拍控制器设计 图6.2是最少拍控制系统结构图,其中H(S)为零阶保持 器,G(S)为被控对象,D(☑)即为待设计的最少拍控制器。 定义广义被控对象的脉冲传递函数为 G(z)=[G(S)]=[H,(S)Gp(S)] 这里,广义被控对象的脉冲传递函数在z平面单位圆上及 单位圆外没有极点,且不含有纯滞后环节。 G(e) R(s) E(z) G,(s) Y(s)T Y(2) D(z) Ho(s) 最少拍控制器 零阶保持器 被控对象 图6.2最少拍随动系统框图
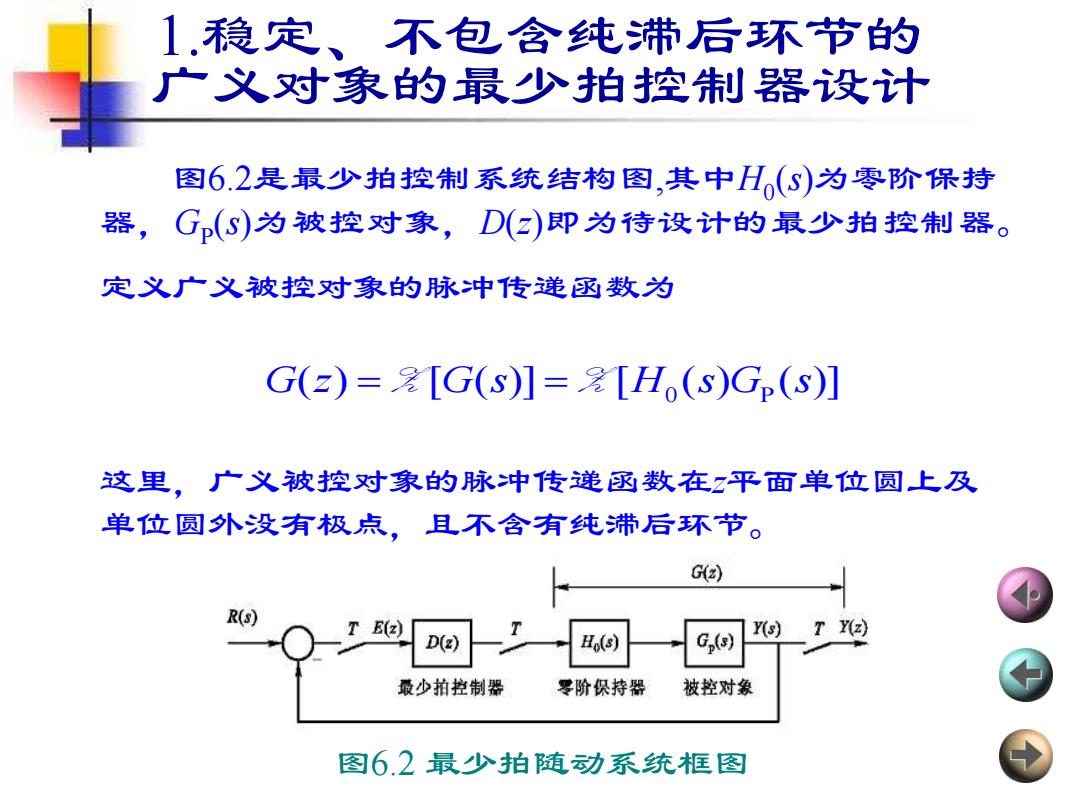
1.稳定、不包含纯滞后环节的 广义对象的最少拍控制器设计 图6.2是最少拍控制系统结构图,其中H0 (s)为零阶保持 器,GP (s)为被控对象,D(z)即为待设计的最少拍控制器。 定义广义被控对象的脉冲传递函数为 这里,广义被控对象的脉冲传递函数在z平面单位圆上及 单位圆外没有极点,且不含有纯滞后环节。 0 P G z G s H s G s ( ) [ ( )] [ ( ) ( )] = = Z Z 图6.2 最少拍随动系统框图
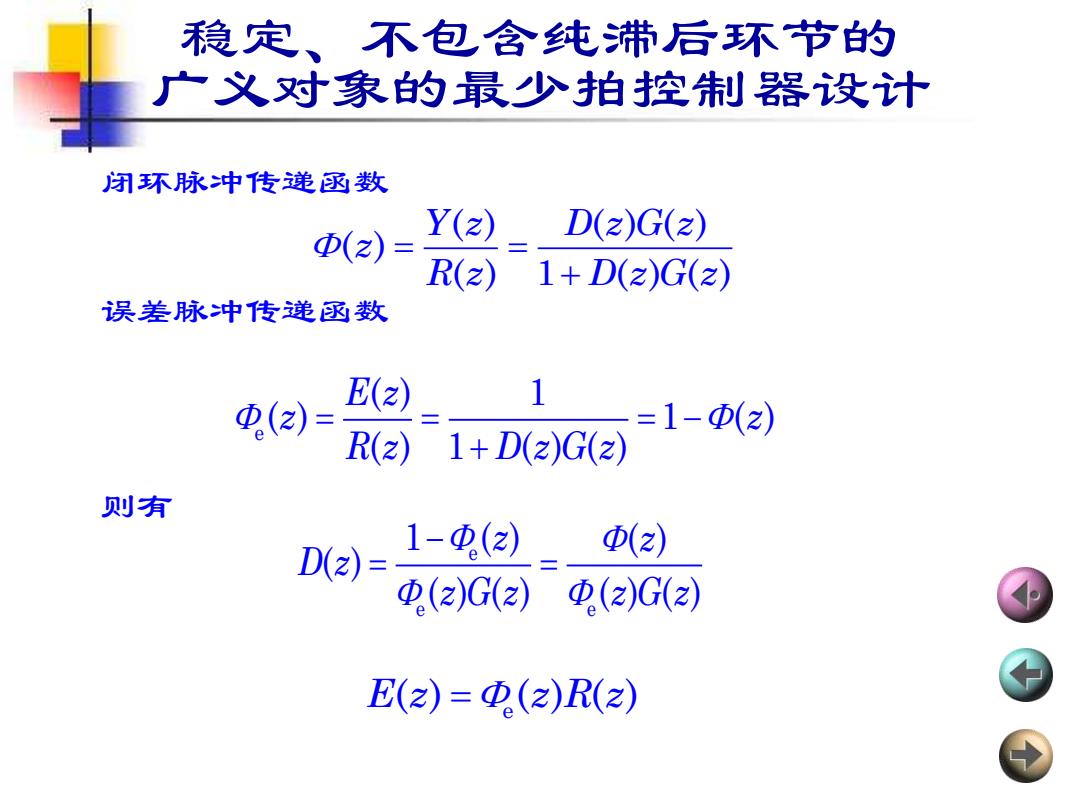
稳定、不包含纯滞后环节的 广义对象的最少拍控制器设计 闭环脉冲传递函数 Φ(2)= Y(a) D(z)G(2) R( 1+D(z)G(2) 误差脉中传递函数 E(z) 1 Φ(2)= =1-Φ(2) R(2) 1+D(2)G(z) 则有 D(2= 1-Φ(2) Φ(z) Φ(z)G(z) Φ.(2)G(2) E(z)=Φ(2)R(z)
稳定、不包含纯滞后环节的 广义对象的最少拍控制器设计 闭环脉冲传递函数 误差脉冲传递函数 则有 = = + ( ) ( ) ( ) ( ) ( ) 1 ( ) ( ) Y z D z G z z R z D z G z = = = − + e ( ) 1 ( ) 1 ( ) ( ) 1 ( ) ( ) E z z z R z D z G z − = = e e e 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) z z D z z G z z G z =e E z z R z ( ) ( ) ( )