全维状态观测器 (4) 由前述可得 x(k+1)-(k+1)=Ax(k)+Bu(k)-(A-HC)(k)-Bu(k)-Hy(k) =(A-HC)[x(k)-(k)] 即 (k+1)=(A-HC)x(k) 若选怿合适的输出误差反馈矩阵日使得状态估计误 差系统的所有极点均位于z平面单位圆内,则误差可在 有限拍内趋于零,即状态估计值在有限拍内可以跟踪上 真实状态,且极点越靠近原点状态估计误差趋于零的速 度越快,反之越慢
全维状态观测器(4) 由前述可得 即 若选择合适的输出误差反馈矩阵H使得状态估计误 差系统的所有极点均位于z平面单位圆内,则误差可在 有限拍内趋于零,即状态估计值在有限拍内可以跟踪上 真实状态,且极点越靠近原点状态估计误差趋于零的速 度越快,反之越慢。 ( )[ ( ) ˆ( )] ( 1) ˆ( 1) ( ) ( ) ( ) ˆ( ) ( ) ( ) A HC k k k k A k B k A HC k B k Hy k x x x x x u x u = − − + − + = + − − − − ( ) ~ ( 1) ( ) ~ x k + = A − HC x k
全维状态观测器 (5) 若指定状态观测器的特征值为 21,22,‘,2m 即期望的特征方程为 f(2)=(2-1(z-22)…(z-z) =z”+(-10(2+22+…+z0)z”+…+(-1)”z12…2n=0 状态观测器的特征多项式为 (2)=2I-(A-HC)=0 比较两式两边z各次幂项的系数可得到一个元方程组,可求得输出 误差反馈系数矩阵H。 例7.8
全维状态观测器(5) * * * 1 2 , , , n z z z * * * * o 1 2 * * * 1 * * * 1 2 1 2 ( ) ( )( ) ( ) ( 1)( ) ( 1) 0 n n n n n n f z z z z z z z z z z z z z z z − = − − − = + − + + + + + − = f z zI A HC o ( ) ( ) 0 = − − = 若指定状态观测器的特征值为 即期望的特征方程为 状态观测器的特征多项式为 比较两式两边z各次幂项的系数可得到一个n元方程组,可求得输出 误差反馈系数矩阵H。 例7.8
2,降维状态观测器 己知n维系统是能观则的,其输出矩阵的秩是m,则 说明系统状态有m个是可以直接观则的,不需要对系统 的n个状态全部进行观测,而只需对另外n-m个状态进行 观测p回。即回用n-维状态观测器代替全维状态观测 器。这种维数低于被控系统状态向量的观测器称为降维 观测器。 >单输入多输出系统降维观测器的设计 已知n维线性定常离散系统(A,b,C)能观测 x(k+1)=Ax(k)+bu(k) y(k)=Cx(k) 其中,x()为n维状态向量,y(k)为m维输出列向量
2. 降维状态观测器(1) 已知n维系统是能观测的,其输出矩阵的秩是m,则 说明系统状态有m个是可以直接观测的,不需要对系统 的n个状态全部进行观测,而只需对另外n-m个状态进行 观测即可。即可用n-m维状态观测器代替全维状态观测 器。这种维数低于被控系统状态向量的观测器称为降维 观测器。 ➢ 单输入多输出系统降维观测器的设计 已知n维线性定常离散系统(A,b,C)能观测 其中,x(k)为n维状态向量,y(k)为m维输出列向量。 ( ) ( ) ( 1) ( ) ( ) k C k k A k bu k y x x x = + = +

降维状态观测器 (2 先将状态x()分解成两部分:可直接测量部分x(k)(mXI维); 不能直接测量需重构部分x(k)(n-m)×1维)。即 += 色 (k)=[0 其中A1为(n-m)×(n-m)维;A12为(n-m)×m维;A21为m×(n-m)维; A22为m×(n-m)维;b1为(n-m)×1维,b2为m×1维。 x(k+1)=Ax(k)+42x2(k)+bu(k) x2(k+1)=A21x(k)+A22x2(k)+b2u(k) 为了用可直接观测的x()估计不可直接观测的x1(k),引入一个虚 拟输出 (k)=A21x1(k)=x2(k+1)-A22x2(k)-b2u(k)
降维状态观测器(2) 先将状态x(k)分解成两部分:可直接测量部分x2 (k)(m×1维); 不能直接测量需重构部分x1 (k)((n-m)×1维)。即 其中A11为(n-m)×(n-m)维;A12为(n-m)×m维;A21为m×(n-m)维; A22为m×(n-m)维;b1为(n-m)×1维; b2为m×1维。 为了用可直接观测的x2 (k)估计不可直接观测的x1 (k) ,引入一个虚 拟输出 ( ) ( ) ( ) ( 1) ( 1) ( 1) 2 1 2 1 2 1 2 2 1 1 1 2 2 1 u k b b k k A A A A k k k + = + + + = x x x x x = ( ) ( ) ( ) [0 ] 2 1 k k k I x x y ( ) ( ) ( 1) ( ) ( ) 21 1 2 22 2 2 z k = A x k = x k + − A x k − b u k 1 11 1 12 2 1 x x x ( 1) ( ) ( ) ( ) k A k A k b u k + = + + 2 21 1 22 2 2 x x x ( 1) ( ) ( ) ( ) k A k A k b u k + = + +
降维状态观测器 (3) 观测器模型结构 整个系统的降维状态观测器实际上相当于全维观侧器的 子系统。因此采用与全维观测器相同的输出误差反馈思 想,构造降维观测器,其结构如图7.7所示。 x2() A12 H(k x() 2) z1 A21 H z() 图77降维状态观测器结构
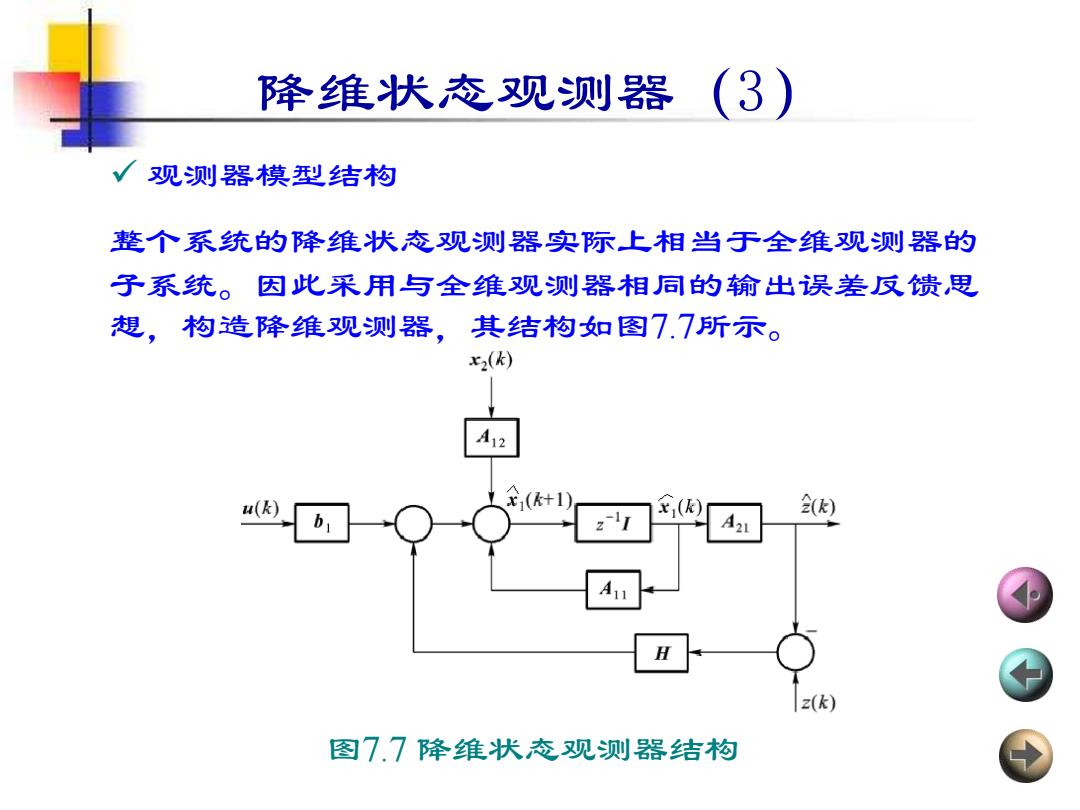
降维状态观测器(3) ✓ 观测器模型结构 整个系统的降维状态观测器实际上相当于全维观测器的 子系统。因此采用与全维观测器相同的输出误差反馈思 想,构造降维观测器,其结构如图7.7所示。 图7.7 降维状态观测器结构