3.PD控制的发展 PID是行之有效的一种控制规律,随着计算机控制 技术的发展和控制理论的发展,许多学者对这种控制方 法进行了更深入的研究,提出了许多性能优良的PD控 制算法。 √可变增益PID控制 √参数自寻优PID控制 √ PID+Ping-Pang复合控制 √自适应PID控制 √模糊PID控制 √PID专家控制系统
3. PID控制的发展 PID是行之有效的一种控制规律,随着计算机控制 技术的发展和控制理论的发展,许多学者对这种控制方 法进行了更深入的研究,提出了许多性能优良的PID控 制算法。 ✓ 可变增益PID控制 ✓ 参数自寻优PID控制 ✓ PID+Ping-Pang复合控制 ✓ 自适应PID控制 ✓ 模糊PID控制 ✓ PID专家控制系统
5,5数字PD控制器的参数整定 在实际控制系统中,控制算式一旦确定,比例, 积分和微分参数的整定就成为重要的工作。控制效果 的好坏在很大程度上取决于这些参数选择得是否得当。 关于PD控制参数整定方法有很多。通常首先要对工 业对象的动态特性作某种简单假设。因此,由这些整 定方法得到的参数值在使用时不一定是最佳的,往往 只作为参考值。在实时控制中,还要在这些值附近探 索,找出实际中有效的最佳值。 √PD参数整定的理论方法 √试凑法确定PD调节参数 √简易工程法整定参数
5.5 数字PID控制器的参数整定 在实际控制系统中,控制算式一旦确定,比例, 积分和微分参数的整定就成为重要的工作。控制效果 的好坏在很大程度上取决于这些参数选择得是否得当。 关于PID控制参数整定方法有很多。通常首先要对工 业对象的动态特性作某种简单假设。因此,由这些整 定方法得到的参数值在使用时不一定是最佳的,往往 只作为参考值。在实时控制中,还要在这些值附近探 索,找出实际中有效的最佳值。 ✓ PID参数整定的理论方法 ✓ 试凑法确定PID调节参数 ✓ 简易工程法整定参数
PID参数整定的理论方法 思路:通过调整PID的三个参数KP、TTD将系统的闭 环特征根分布在S域的左半平面的某一特定域内,以保 证系统具有足够的稳定裕度并满足给定的性能指标。 对采用PID控制器的任一系统,其闭环特征方程 ans”+an-1s+…+a1S+a0=0 an3an-1,∴,☑1,a0 50 被控对象的物理参数 VPID控制器的调节参数 2n,m-1…,1,0 50
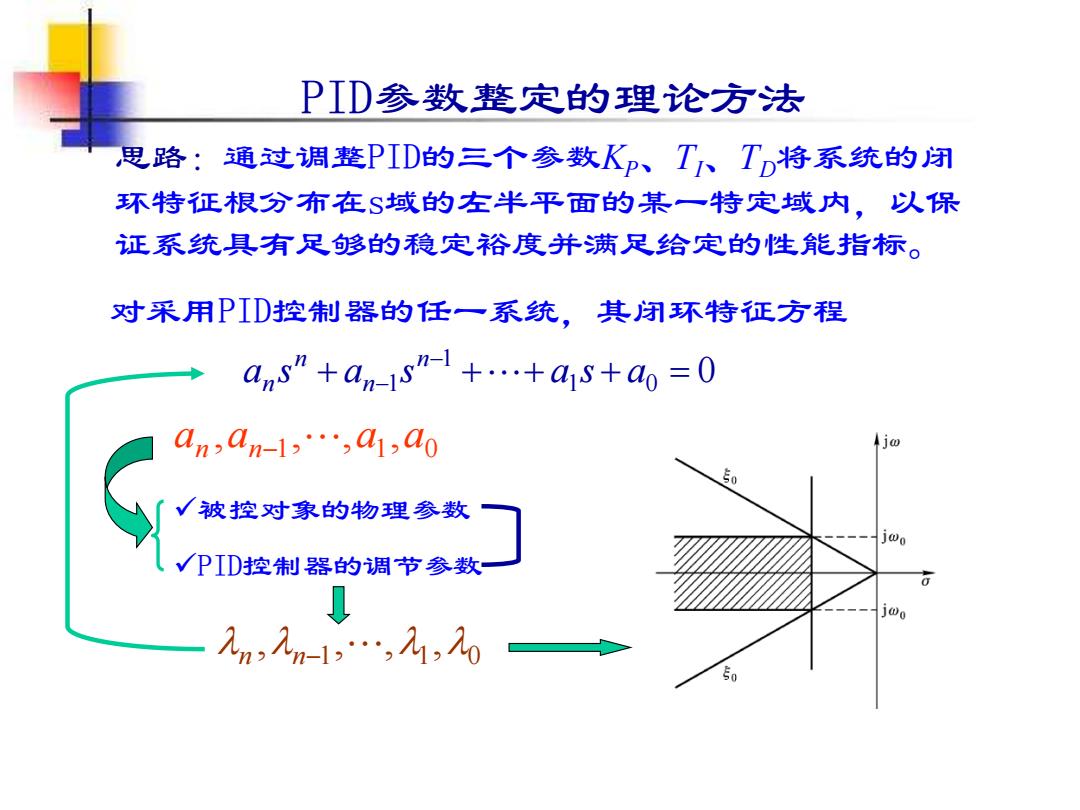
PID参数整定的理论方法 思路:通过调整PID的三个参数KP、TI、TD将系统的闭 环特征根分布在s域的左半平面的某一特定域内,以保 证系统具有足够的稳定裕度并满足给定的性能指标。 对采用PID控制器的任一系统,其闭环特征方程 1 0 0 1 + 1 + + + = − a s a − s a s a n n n n 1 1 0 an ,an− , ,a ,a ✓被控对象的物理参数 ✓PID控制器的调节参数 1 1 0 n ,n− , , ,
试凑法确定PD调节参数 >增大比例系数KD一般将加快系统的响应,在有 静差的情况下有利于减小静差。但过大的比例系 数会使系统有较大的超调,并产生振荡,使系统 的稳定性变坏: >增大积分时间TI一般有利于减小超调,减小振 荡,使系统更加稳定,但系统静差的消除将随之 减慢; >增大微分时间TD亦有利于加快系统的响应,减 小振荡,使系统稳定性增加,但系统对干扰的抑 制能力减弱,对扰动有较敏感的响应;另外,过 大的微分系数也将使系统的稳定性变坏
试凑法确定PID调节参数 ➢增大比例系数Kp一般将加快系统的响应,在有 静差的情况下有利于减小静差。但过大的比例系 数会使系统有较大的超调,并产生振荡,使系统 的稳定性变坏; ➢增大积分时间TI一般有利于减小超调,减小振 荡,使系统更加稳定,但系统静差的消除将随之 减慢; ➢增大微分时间TD亦有利于加快系统的响应,减 小振荡,使系统稳定性增加,但系统对干扰的抑 制能力减弱,对扰动有较敏感的响应;另外,过 大的微分系数也将使系统的稳定性变坏
PID参数的调整步骤 对参数的调整步骤为先比例,后积分,再微分,即: (1)先整定比例部分:将比例系数K由小调大,并观察相应的系统响应 趋势,直到得到反映快、超调小的响应曲线。如果系统没有静差或静差 已小到允许范围之内,同时响应曲线已较令人满意,那只须用比例调节 器即可,最优比例系数也由此确定。 (2)如果在比例调节的基础上系统的静差不能满足设计要求,则须加入 积分环节。整定时一般先置一个较大的积分时间系数Tī,同时将第一步 整定得到的比例系数K缩小一些(比如取原来的80%),然后减小积分时 间系数使在保特系统较好的动态性能指标的基础上,系统的静差得到消 除。在此过程中,可以根据响应曲线的变化趋势反复地改变比例系数K? 和积分时间系数T,从而实现满意的控制过程和整定参数。 (3)如果即使有比例积分控制器消除了偏差,但动态过程仍不尽满意, 则可以加入微分环节,构成PID控制器。在整定时,可先置微分时间系 数T为零,在第二步整定的基础上,增大微分时间系数T,同时相应地 改变比例系数K和积分时间系数T,逐步试凑,以获得满意的调节效果 和控制参数
PID参数的调整步骤 对参数的调整步骤为先比例,后积分,再微分,即: (1)先整定比例部分:将比例系数KP由小调大,并观察相应的系统响应 趋势,直到得到反映快、超调小的响应曲线。如果系统没有静差或静差 已小到允许范围之内,同时响应曲线已较令人满意,那只须用比例调节 器即可,最优比例系数也由此确定。 (2)如果在比例调节的基础上系统的静差不能满足设计要求,则须加入 积分环节。整定时一般先置一个较大的积分时间系数TI,同时将第一步 整定得到的比例系数KP缩小一些(比如取原来的80%),然后减小积分时 间系数使在保持系统较好的动态性能指标的基础上,系统的静差得到消 除。在此过程中,可以根据响应曲线的变化趋势反复地改变比例系数KP 和积分时间系数TI,从而实现满意的控制过程和整定参数。 (3)如果即使有比例积分控制器消除了偏差,但动态过程仍不尽满意, 则可以加入微分环节,构成PID控制器。在整定时,可先置微分时间系 数TD为零,在第二步整定的基础上,增大微分时间系数TD,同时相应地 改变比例系数KP和积分时间系数TI,逐步试凑,以获得满意的调节效果 和控制参数