货架上下料AGV机械系统的设计与仿真 1概述 AGV(Automatic Guided Vehicles),又称为自动引导车,是一种智能物料搬运设备。 AGV在自动引导系统下能够延着规定路线行进,或者通过内部的各个传感器进行自主 式导航自行行进。在AGV上具有物料转移功能的装置,进行物料的装载与卸载,AGV 嵌入式芯片起着控制整辆AGV,还有其他的安全保护装置。 1.1研究背景及意义 AGV在发生的频率很高的物流系统中,搬运占据物流费用的重要部分,在当今人 口红利逐渐下降的背景下,一些低技术含量,重复的工作逐渐的被机器所替代。在物流 系统频繁发生的场景中,以往都是由人工操作搬运设备进行物料的转移。而现在这样的 场景被智能AGV所替代,AGV通过终端系统判断物料所在的位置,通络路线规划并导 航到达物料货架,夹取物料,再搬运货物到达目的地,降低人力成本。AGV能充分地 体现其自动性和柔性,实现高效、经济、灵活的无人化生产。例如,申通在物流快递分 拣系统中,大量使用AGV,大大增加工作效率同时避免人为因素出错,因此AGV的 使用场合最广泛,近几年AGV发展十分迅速。 1.2发展趋势及发展前景 AGV(Automatic Guided Vehicle)一一自动导引车是上世纪50年代发展起来的智能 搬运型机器人。AGV是现代工业自动化物流系统中的关键设备之一,它是以电池为动 力,装备有电磁或光学等自动导航装置,能够独立自动寻址,并通过计算机系统控制, 完成无人驾驶及作业的设备。 在国际背景上,日本人认为1981年是柔性加工系统元年,这样看来AGV大规模 应用的历史也只有16至20年。但是,AGV发展速度是非常快的。在1981年美国通用 公司开始使用AGV,1985年AGV保有量500台,1987年AGV保有量3000台。资料 表明欧洲40%的AGV用于汽车工业,日本15%的AGV用于汽车工业,也就是说AGV 在其他行业也有广泛的应用 目前国内总体看AGV的应用刚刚开始,相当于国外80年代初的水平。但从应用 的行业分析,分布面非常广阔,它常用于工厂,汽车工业,飞机制造业,家用电器行业, 烟草行业,机械加工,仓库,邮电部门,地下采矿厂中进行材料运输,。这说明AGV有一 个潜在的广阔市场。AGV从技术的发展看,主要是从国家线路向可调整线路;从简单 车载单元控制向复杂系统计算机控制:从原始的段点定期通讯到先进的实时通讯等方 向发展:从落后的现场控制到先进的远程图形监控:从领域的发展看,主要是从较为集 中的机械制造、加工、装配生产线向广泛的各行业自动化生产,物料搬运,物品仓储, 商品配送等行业发展。自动导航车开发的一个主要领域是导航和控制,导航的本质就是 避免迷路和与障碍物相撞成功的到达目的地.所以,自动导引小车具有很大的发展前景
货架上下料 AGV 机械系统的设计与仿真 1 概述 AGV(Automatic Guided Vehicles),又称为自动引导车,是一种智能物料搬运设备。 AGV 在自动引导系统下能够延着规定路线行进,或者通过内部的各个传感器进行自主 式导航自行行进。在 AGV 上具有物料转移功能的装置,进行物料的装载与卸载,AGV 嵌入式芯片起着控制整辆 AGV,还有其他的安全保护装置。 1.1 研究背景及意义 AGV 在发生的频率很高的物流系统中,搬运占据物流费用的重要部分,在当今人 口红利逐渐下降的背景下,一些低技术含量,重复的工作逐渐的被机器所替代。在物流 系统频繁发生的场景中,以往都是由人工操作搬运设备进行物料的转移。而现在这样的 场景被智能 AGV 所替代,AGV 通过终端系统判断物料所在的位置,通络路线规划并导 航到达物料货架,夹取物料,再搬运货物到达目的地,降低人力成本。AGV 能充分地 体现其自动性和柔性,实现高效、经济、灵活的无人化生产。例如,申通在物流快递分 拣系统中,大量使用 AGV,大大增加工作效率同时避免人为因素出错,因此 AGV 的 使用场合最广泛,近几年 AGV 发展十分迅速。 1.2 发展趋势及发展前景 AGV(Automatic Guided Vehicle)——自动导引车是上世纪 50 年代发展起来的智能 搬运型机器人。AGV 是现代工业自动化物流系统中的关键设备之一,它是以电池为动 力,装备有电磁或光学等自动导航装置,能够独立自动寻址,并通过计算机系统控制, 完成无人驾驶及作业的设备。 在国际背景上,日本人认为 1981 年是柔性加工系统元年,这样看来 AGV 大规模 应用的历史也只有 16 至 20 年。但是,AGV 发展速度是非常快的。在 1981 年美国通用 公司开始使用 AGV,1985 年 AGV 保有量 500 台,1987 年 AGV 保有量 3000 台。资料 表明欧洲 40%的 AGV 用于汽车工业,日本 15%的 AGV 用于汽车工业,也就是说 AGV 在其他行业也有广泛的应用 目前国内总体看 AGV 的应用刚刚开始,相当于国外 80 年代初的水平。但从应用 的行业分析,分布面非常广阔,它常用于工厂,汽车工业,飞机制造业,家用电器行业, 烟草行业,机械加工,仓库,邮电部门,地下采矿厂中进行材料运输,。这说明 AGV 有一 个潜在的广阔市场。AGV 从技术的发展看,主要是从国家线路向可调整线路;从简单 车载单元控制向复杂 系统计算机控制;从原始的段点定期通讯到先进的实时通讯等方 向发展;从落后的现场控制到先进的远程图形监控;从领域的发展看,主要是从较为集 中的机械制造、加工、装配生产线向广泛的各行业自动化生产,物料搬运,物品仓储, 商品配送等行业发展。自动导航车开发的一个主要领域是导航和控制,导航的本质就是 避免迷路和与障碍物相撞成功的到达目的地.所以,自动导引小车具有很大的发展前景
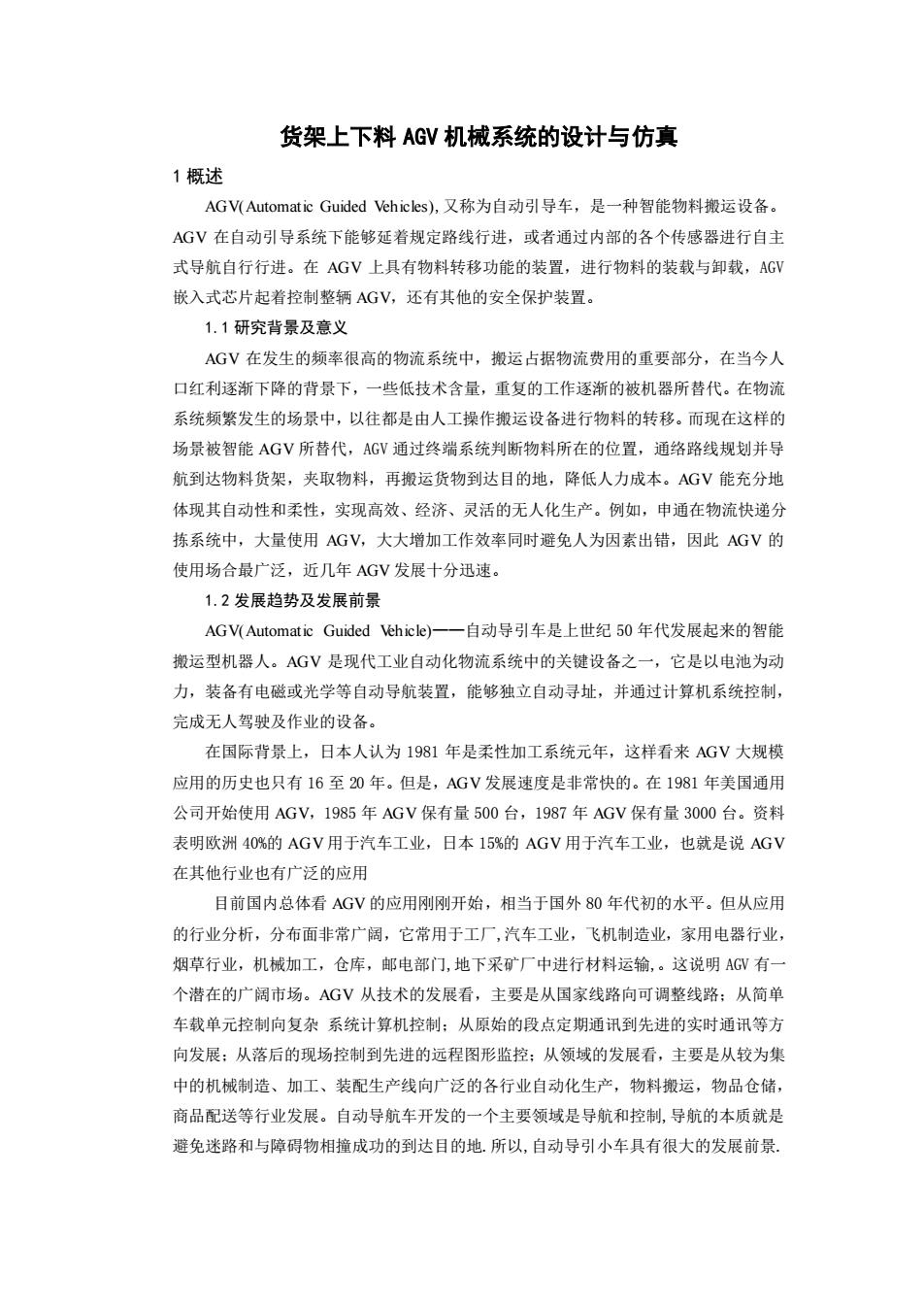
2.AGV系统总体方案的设计 2.1AGV系统的构成与三维模型 该AGV系统由控制系统、通讯系统、地面导航系统、充电系统、物料转移系统和 地标读取系统等几部分组成,如图2-1所示 辅助系统 驱动单元 控制平台 通讯系统 地 充电系统 充电桩 空利 车 相互协调作业 系 避障传感器 载 地标 系 装载系统 图2-1AGV总系统 该AGV的设计设计参数: 自身重量:150KG 驱动方式:驱动单元差速行进 速度:32 m/min 载重能力:50KG AGV外形尺寸长宽高:1300mm×320mm×1000mm 传动方式:链传动 导引方式:磁传导 下面是三维模型:
2.AGV 系统总体方案的设计 2.1AGV 系统的构成与三维模型 该 AGV 系统由控制系统、通讯系统、地面导航系统、充电系统、物料转移系统和 地标读取系统等几部分组成,如图 2-1 所示 图 2-1 AGV 总系统 该 AGV 的设计设计参数: 自身重量:150KG 驱动方式:驱动单元差速行进 速度:32m/min 载重能力:50KG AGV 外形尺寸长宽高:1300mm×320mm×1000mm 传动方式:链传动 导引方式:磁传导 下面是三维模型: 地 面 控 制 系 统 控制平台 驱动单元 充电桩 充电系统 地标 通讯系统 避障传感器 装载系统 辅助系统 相互协调作业 车 载 系 统

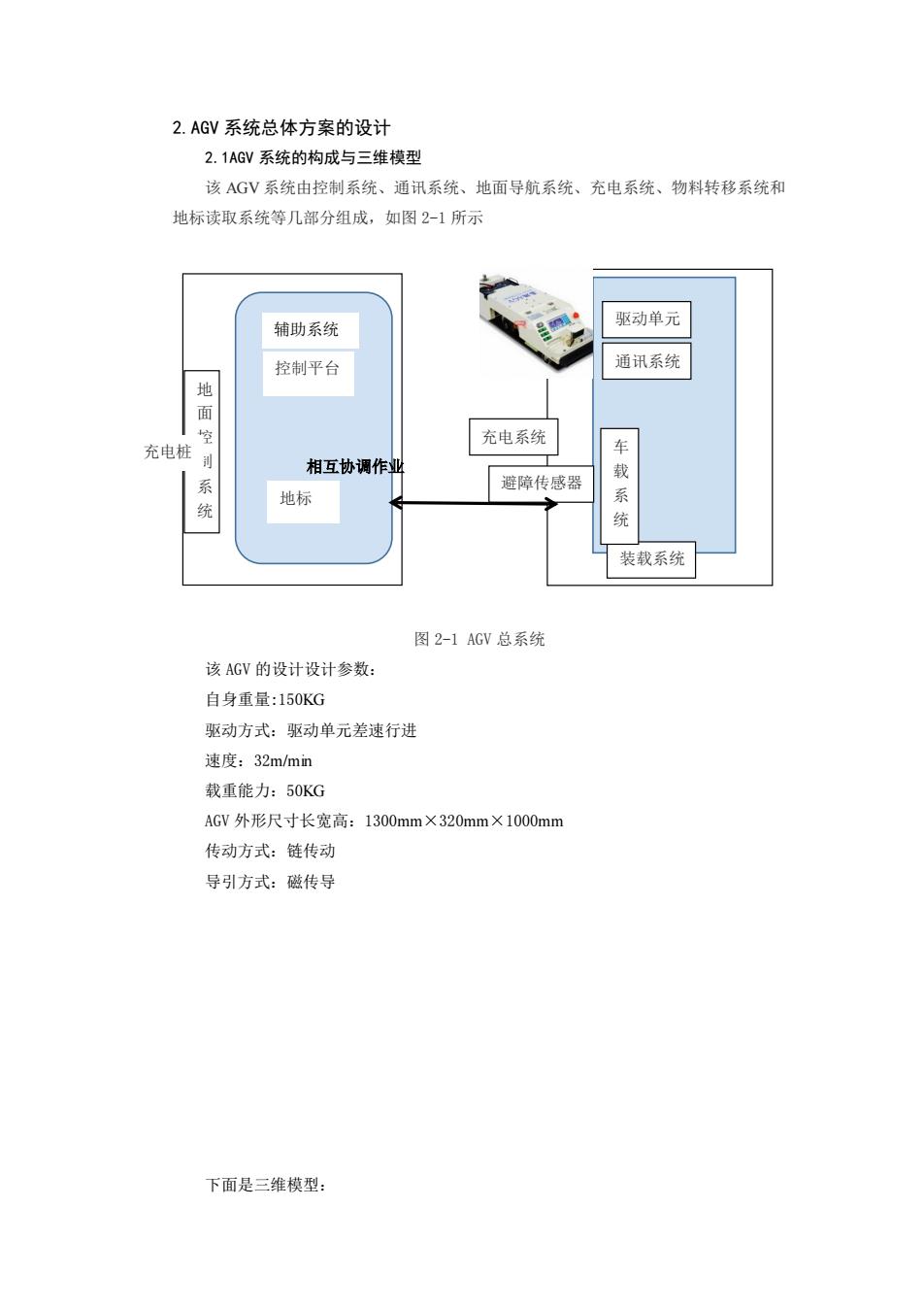
4 5 图2-2AGV整体模型1 6 8 图2-3AGV整体模型2 1--控制屏 6--一电池 2-一-料架 7-一驱动单元 3-—-升降平台 8-—万向轮 4--壁障传感器 5-一防撞机构 2.2确定导航方式 1)坐标导航:用定位块将AGV的行驶区域分成若干坐标小区域,通过对小区域的 计数实现导航,一般有光电式(将坐标小区域以两种颜色划分,通过光电器件计数)和 电磁式(将坐标小区域以金属块或磁块划分,通过电磁感应器件计数)两种形式,其优 点是可以实现路径的修改,导引的可靠性好,对环境无特别要求
图 2-2 AGV 整体模型 1 图 2-3 AGV 整体模型 2 1---控制屏 6---电池 2---料架 7---驱动单元 3---升降平台 8---万向轮 4---壁障传感器 5---防撞机构 2.2 确定导航方式 1)坐标导航:用定位块将 AGV 的行驶区域分成若干坐标小区域,通过对小区域的 计数实现导航,一般有光电式(将坐标小区域以两种颜色划分,通过光电器件计数)和 电磁式(将坐标小区域以金属块或磁块划分,通过电磁感应器件计数)两种形式,其优 点是可以实现路径的修改,导引的可靠性好,对环境无特别要求。 1 2 4 5 3 7 8 6
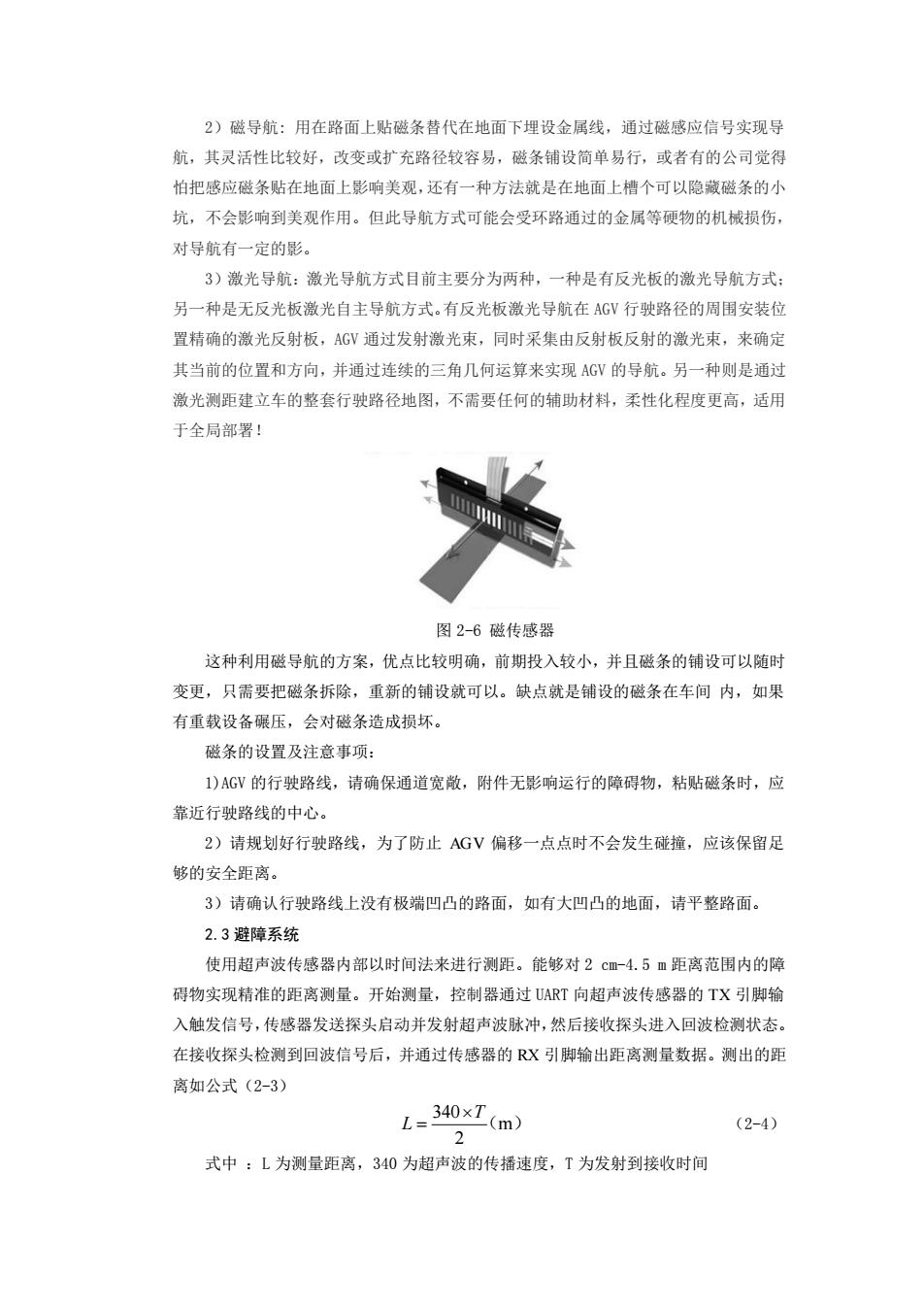
2)磁导航:用在路面上贴磁条替代在地面下埋设金属线,通过磁感应信号实现导 航,其灵活性比较好,改变或扩充路径较容易,磁条铺设简单易行,或者有的公司觉得 怕把感应磁条贴在地面上影响美观,还有一种方法就是在地面上槽个可以隐藏磁条的小 坑,不会影响到美观作用。但此导航方式可能会受环路通过的金属等硬物的机械损伤, 对导航有一定的影。 3)激光导航:激光导航方式目前主要分为两种,一种是有反光板的激光导航方式: 另一种是无反光板激光自主导航方式。有反光板激光导航在AGV行驶路径的周围安装位 置精确的激光反射板,AGV通过发射激光束,同时采集由反射板反射的激光束,来确定 其当前的位置和方向,并通过连续的三角几何运算来实现AGV的导航。另一种则是通过 激光测距建立车的整套行驶路径地图,不需要任何的辅助材料,柔性化程度更高,适用 于全局部署! 图2-6磁传感器 这种利用磁导航的方案,优点比较明确,前期投入较小,并且磁条的铺设可以随时 变更,只需要把磁条拆除,重新的铺设就可以。缺点就是铺设的磁条在车间内,如果 有重载设备碾压,会对磁条造成损坏。 磁条的设置及注意事项: 1)AGV的行驶路线,请确保通道宽敞,附件无影响运行的障碍物,粘贴磁条时,应 靠近行驶路线的中心。 2)请规划好行驶路线,为了防止AGV偏移一点点时不会发生碰撞,应该保留足 够的安全距离。 3)请确认行驶路线上没有极端凹凸的路面,如有大凹凸的地面,请平整路面。 2.3避障系统 使用超声波传感器内部以时间法来进行测距。能够对2cm-4.5m距离范围内的障 碍物实现精准的距离测量。开始测量,控制器通过UART向超声波传感器的TX引脚输 入触发信号,传感器发送探头启动并发射超声波脉冲,然后接收探头进入回波检测状态。 在接收探头检测到回波信号后,并通过传感器的X引脚输出距离测量数据。测出的距 离如公式(2-3) L=340xT(m) (2-4) 2 式中:L为测量距离,340为超声波的传播速度,T为发射到接收时间
2)磁导航: 用在路面上贴磁条替代在地面下埋设金属线,通过磁感应信号实现导 航,其灵活性比较好,改变或扩充路径较容易,磁条铺设简单易行,或者有的公司觉得 怕把感应磁条贴在地面上影响美观,还有一种方法就是在地面上槽个可以隐藏磁条的小 坑,不会影响到美观作用。但此导航方式可能会受环路通过的金属等硬物的机械损伤, 对导航有一定的影。 3)激光导航:激光导航方式目前主要分为两种,一种是有反光板的激光导航方式; 另一种是无反光板激光自主导航方式。有反光板激光导航在 AGV 行驶路径的周围安装位 置精确的激光反射板,AGV 通过发射激光束,同时采集由反射板反射的激光束,来确定 其当前的位置和方向,并通过连续的三角几何运算来实现 AGV 的导航。另一种则是通过 激光测距建立车的整套行驶路径地图,不需要任何的辅助材料,柔性化程度更高,适用 于全局部署! 图 2-6 磁传感器 这种利用磁导航的方案,优点比较明确,前期投入较小,并且磁条的铺设可以随时 变更,只需要把磁条拆除,重新的铺设就可以。缺点就是铺设的磁条在车间 内,如果 有重载设备碾压,会对磁条造成损坏。 磁条的设置及注意事项: 1)AGV 的行驶路线,请确保通道宽敞,附件无影响运行的障碍物,粘贴磁条时,应 靠近行驶路线的中心。 2)请规划好行驶路线,为了防止 AGV 偏移一点点时不会发生碰撞,应该保留足 够的安全距离。 3)请确认行驶路线上没有极端凹凸的路面,如有大凹凸的地面,请平整路面。 2.3 避障系统 使用超声波传感器内部以时间法来进行测距。能够对 2 cm-4.5 m 距离范围内的障 碍物实现精准的距离测量。开始测量,控制器通过 UART 向超声波传感器的 TX 引脚输 入触发信号,传感器发送探头启动并发射超声波脉冲,然后接收探头进入回波检测状态。 在接收探头检测到回波信号后,并通过传感器的 RX 引脚输出距离测量数据。测出的距 离如公式(2-3) (m) 2 340 T L (2-4) 式中 :L 为测量距离,340 为超声波的传播速度,T 为发射到接收时间
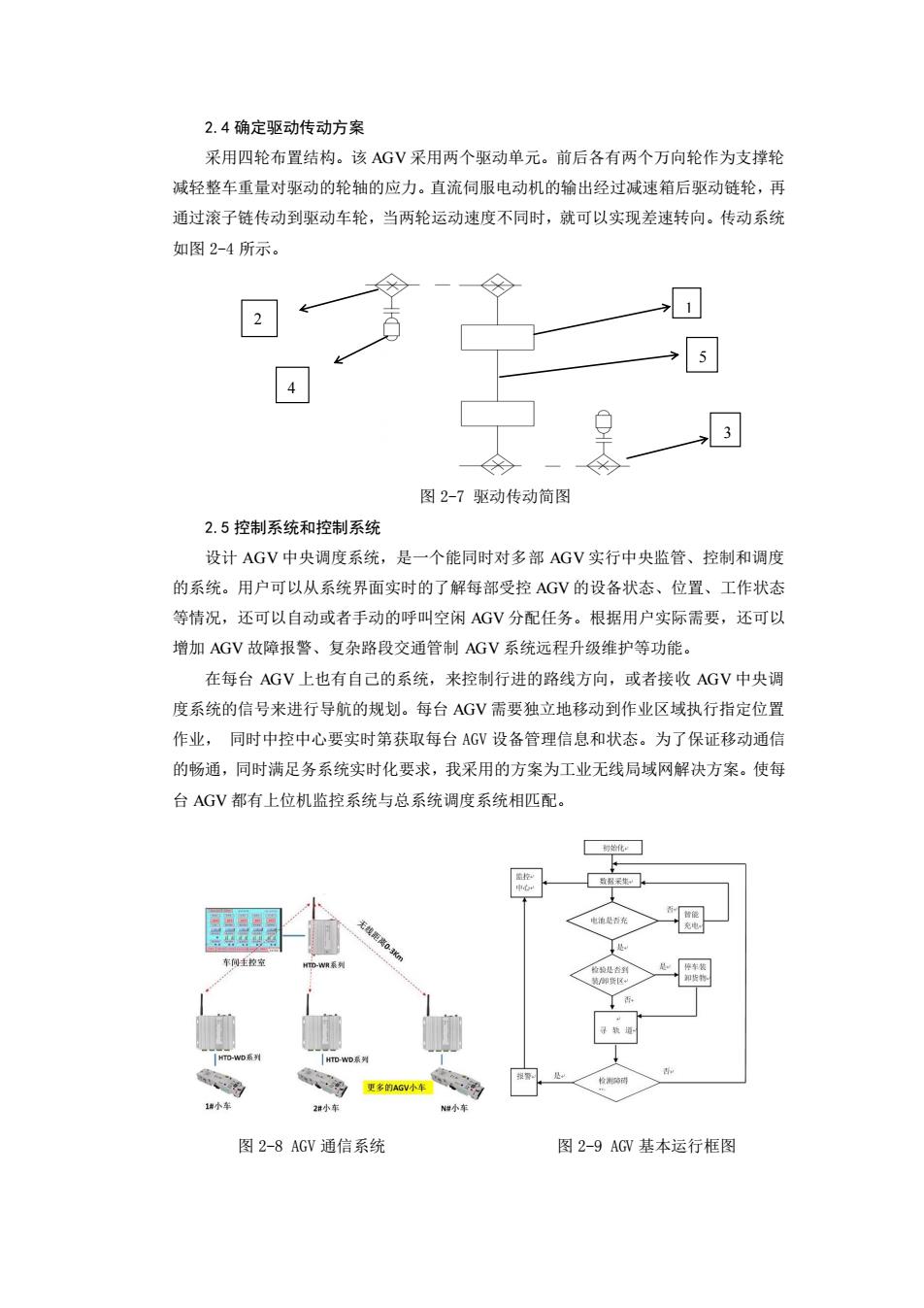
2.4确定驱动传动方案 采用四轮布置结构。该AGV采用两个驱动单元。前后各有两个万向轮作为支撑轮 减轻整车重量对驱动的轮轴的应力。直流伺服电动机的输出经过减速箱后驱动链轮,再 通过滚子链传动到驱动车轮,当两轮运动速度不同时,就可以实现差速转向。传动系统 如图2-4所示。 1 5 4 图2-7驱动传动简图 2.5控制系统和控制系统 设计AGV中央调度系统,是一个能同时对多部AGV实行中央监管、控制和调度 的系统。用户可以从系统界面实时的了解每部受控AGV的设备状态、位置、工作状态 等情况,还可以自动或者手动的呼叫空闲AGV分配任务。根据用户实际需要,还可以 增加AGV故障报警、复杂路段交通管制AGV系统远程升级维护等功能。 在每台AGV上也有自己的系统,来控制行进的路线方向,或者接收AGV中央调 度系统的信号来进行导航的规划。每台AGV需要独立地移动到作业区域执行指定位置 作业,同时中控中心要实时第获取每台AGV设备管理信息和状态。为了保证移动通信 的畅通,同时满足务系统实时化要求,我采用的方案为工业无线局域网解决方案。使每 台AGV都有上位机监控系统与总系统调度系统相匹配。 初始化 电是充 无线距离03球m ↓是 布间主控室 -W系 扣货风 TD-wD系到 HTD-WD.系到 更多的AGV小车 1小车 2#小车 N#小车 图2-8AGV通信系统 图2-9AGW基本运行框图
2.4 确定驱动传动方案 采用四轮布置结构。该 AGV 采用两个驱动单元。前后各有两个万向轮作为支撑轮 减轻整车重量对驱动的轮轴的应力。直流伺服电动机的输出经过减速箱后驱动链轮,再 通过滚子链传动到驱动车轮,当两轮运动速度不同时,就可以实现差速转向。传动系统 如图 2-4 所示。 图 2-7 驱动传动简图 2.5 控制系统和控制系统 设计 AGV 中央调度系统,是一个能同时对多部 AGV 实行中央监管、控制和调度 的系统。用户可以从系统界面实时的了解每部受控 AGV 的设备状态、位置、工作状态 等情况,还可以自动或者手动的呼叫空闲 AGV 分配任务。根据用户实际需要,还可以 增加 AGV 故障报警、复杂路段交通管制 AGV 系统远程升级维护等功能。 在每台 AGV 上也有自己的系统,来控制行进的路线方向,或者接收 AGV 中央调 度系统的信号来进行导航的规划。每台 AGV 需要独立地移动到作业区域执行指定位置 作业, 同时中控中心要实时第获取每台 AGV 设备管理信息和状态。为了保证移动通信 的畅通,同时满足务系统实时化要求,我采用的方案为工业无线局域网解决方案。使每 台 AGV 都有上位机监控系统与总系统调度系统相匹配。 图 2-8 AGV 通信系统 图 2-9 AGV 基本运行框图 2 4 1 5 3