含间隙机构动力学研究背景 由于连接铰间隙导致的工程问题举例 1997年5月,我国发射的东三通信卫星由于铰关节间隙的 存在,出现颤振 2. 1999年2月,俄国宇航员在太空中未展开一面巨大的太空 镜子,使“人造月亮计划”失败 3. 1990年,美国Hubble太空望远镜入轨后,因太阳能帆板连 接处存在间隙再加之昼夜温差的影响而导致帆板的“卡死 一滑动”周期性运动,使其不能精确定位 空间机构动力学影响因素 1变拓扑结构(自由度变化) 2.间隙单边约束 3.空间环境(无根、失重、光压、真空、温差等) 4碰撞、阻尼、摩擦等干扰
一、含间隙机构动力学研究背景 由于连接铰间隙导致的工程问题举例 1. 1997年5月,我国发射的东三通信卫星由于铰关节间隙的 存在,出现颤振 2. 1999年2月,俄国宇航员在太空中未展开一面巨大的太空 镜子,使“人造月亮计划”失败 3. 1990年,美国Hubble太空望远镜入轨后,因太阳能帆板连 接处存在间隙再加之昼夜温差的影响而导致帆板的“卡死 -滑动”周期性运动 ,使其不能精确定位 空间机构动力学影响因素 1.变拓扑结构(自由度变化) 2.间隙单边约束 3.空间环境(无根、失重、光压、真空、温差等) 4.碰撞、阻尼、摩擦等干扰
含间隙机构动力学研究背景 连接间隙导致两种状态:带有摩擦的滑动和空转下 的内撞击。 2. 运动副间隙的接触模型及其碰撞特性是最基本的问 题之一。 3. 含铰接间隙的机构动力学,从力学本质上看是一种 非定常的、含碰撞的、变结构的、非线性的动力学 过程,连接铰间隙是结构非线性和无源阻尼的主要 来源
一、含间隙机构动力学研究背景 1. 连接间隙导致两种状态:带有摩擦的滑动和空转下 的内撞击。 2. 运动副间隙的接触模型及其碰撞特性是最基本的问 题之一。 3. 含铰接间隙的机构动力学,从力学本质上看是一种 非定常的、含碰撞的、变结构的、非线性的动力学 过程,连接铰间隙是结构非线性和无源阻尼的主要 来源

含间隙机械系统动力学建模中的关键问题 间隙铰内碰撞过程的处理 2 间隙内碰撞模型与多体系统动力学模型的集成
含间隙机械系统动力学建模中的关键问题 1. 间隙铰内碰撞过程的处理 2. 间隙内碰撞模型与多体系统动力学模型的集成

二、 间隙铰模型 销轴自由运动受到孔体空间的限制,一般会产生内碰撞。 根据运动副元素(轴销与孔体)相对运动关系的不同假设,间 隙模型主要分四类: 1.连续接触模型 2.有限元模型 3.经典碰撞模型 4.接触变形模型
二、间隙铰模型 销轴自由运动受到孔体空间的限制,一般会产生内碰撞。 根据运动副元素(轴销与孔体)相对运动关系的不同假设,间 隙模型主要分四类: 1. 连续接触模型 2. 有限元模型 3. 经典碰撞模型 4. 接触变形模型
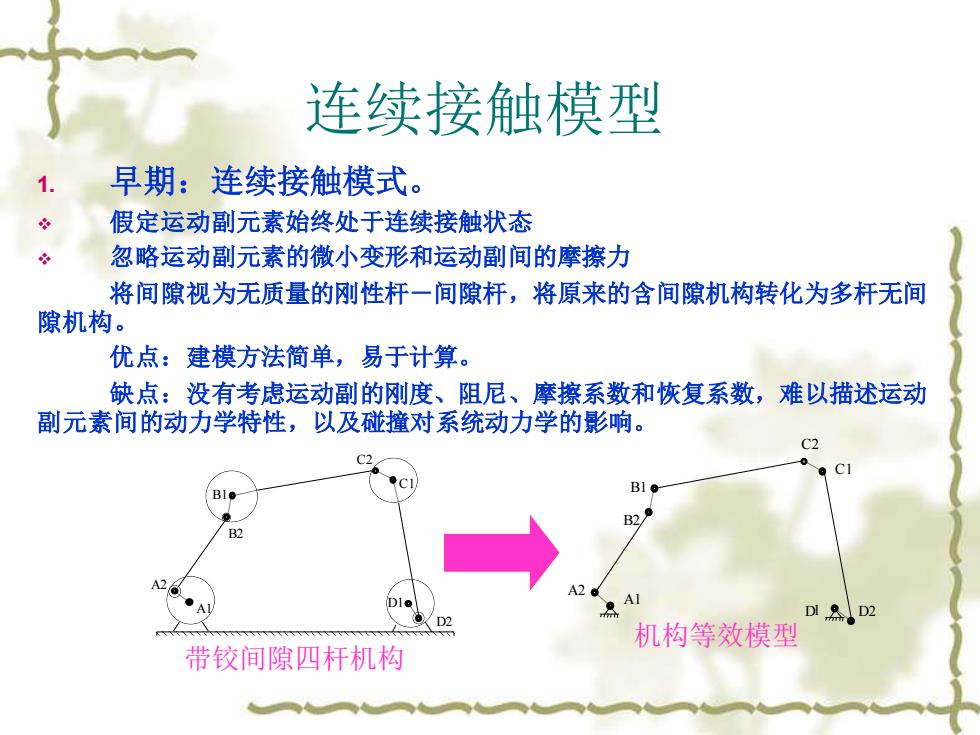
连续接触模型 早期:连续接触模式。 假定运动副元素始终处于连续接触状态 忽略运动副元素的微小变形和运动副间的摩擦力 将间隙视为无质量的刚性杆一间隙杆,将原来的含间隙机构转化为多杆无间 隙机构。 优点:建模方法简单,易于计算。 缺点:没有考虑运动副的刚度、阻尼、摩擦系数和恢复系数,难以描述运动 副元素间的动力学特性,以及碰撞对系统动力学的影响。 C2 C2 D2 DI D2 机构等效模型 带铰间隙四杆机构
连续接触模型 1. 早期:连续接触模式。 ❖ 假定运动副元素始终处于连续接触状态 ❖ 忽略运动副元素的微小变形和运动副间的摩擦力 将间隙视为无质量的刚性杆-间隙杆,将原来的含间隙机构转化为多杆无间 隙机构。 优点:建模方法简单,易于计算。 缺点:没有考虑运动副的刚度、阻尼、摩擦系数和恢复系数,难以描述运动 副元素间的动力学特性,以及碰撞对系统动力学的影响。 A1 A2 B1 B2 C1 C2 D2 D1 A1 A2 B1 B2 C1 C2 D1 D2 带铰间隙四杆机构 机构等效模型