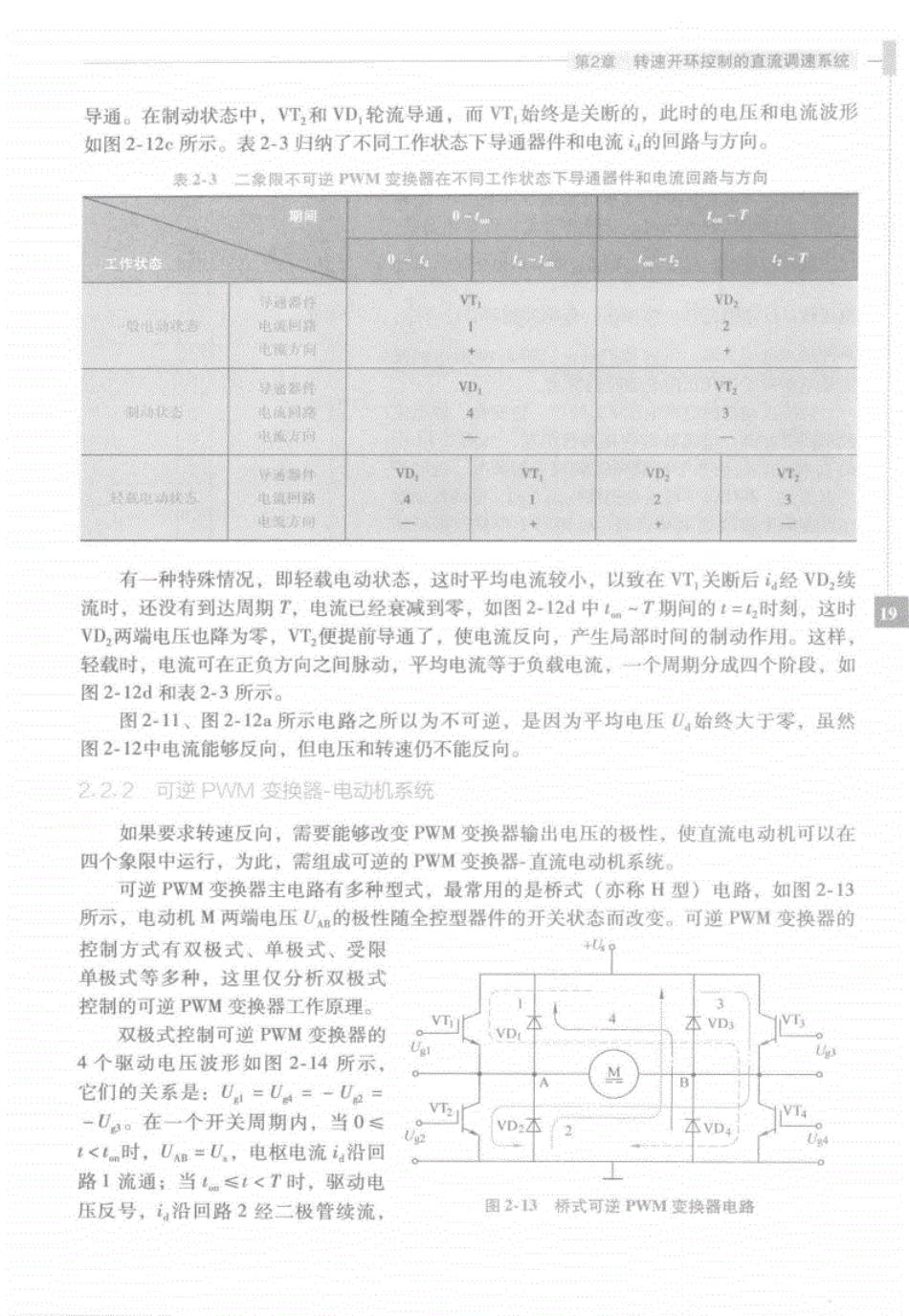
第2意转速开环控制的直流调速系统 导通。在制动状态中,VT,和VD,轮流导通,而VT,始终是关断的,此时的电压和电流波形 如图2-12c所示。表2-3归纳了不同工作状态下导通器件和电流,的回路与方向。 秀2.3 二象限不可逆PM变换器在不同工作状态下导通器件和电流回路与方向 工作状 - t-T VD, VD 4 VD, VD. 电 有一种特殊情况,即轻载电动状态,这时平均电流较小,以致在VT,关断后i,经VD,续 流时,还没有到达周期T,电流已经衰减到零,如图2-12中。-T期间的1=,时刻,这时9 VD,两端电压也降为零,VT便提前导通了,使电流反向,产生局部时间的制动作用。这样, 轻载时,电流可在正负方向之间脉动,平均电流等于负载电流, 一个周期分成四个阶段,如 图2-12d和表2-3所示。 图211、图2-12a所示电路之所以为不可逆,是因为平均电压0,始终大于零,虽量然 图2-12中电流能够反向,但电压和转速仍不能反向。 222 可逆PM变换器-电动机系统 如果要求转速反向,需要能够改变PWM变换器输出电压的极性,使直流电动机可以在 四个象限中运行,为此,需组成可逆的PWM变换器-直流电动机系统 可逆PWM变换器主电路有多种型式,最常用的是桥式(亦称H型)电路,如图213 所示,电动机M两端申压U。的极性新全控型器生的开关状态而收变。可可黄PWM变换摆的 控制方式有双极式、单极式、受限 9 单极式等多种,这里仅分析双极式 控制的可逆PWM变换器工作原理。 双极式控制可逆PWM变换器的 VD 4个驱动电压波形如图2-14所示 它们的关系是:U=U。=-U,= -0。在一个开关周期内,当0≤ vD本/ 本vD t<时,U=U,电枢电流沿回 路1流通:当≤<T时,驱动电 压反号,沿回路2经二极管续流 图213桥式可逆PWM变换器电路
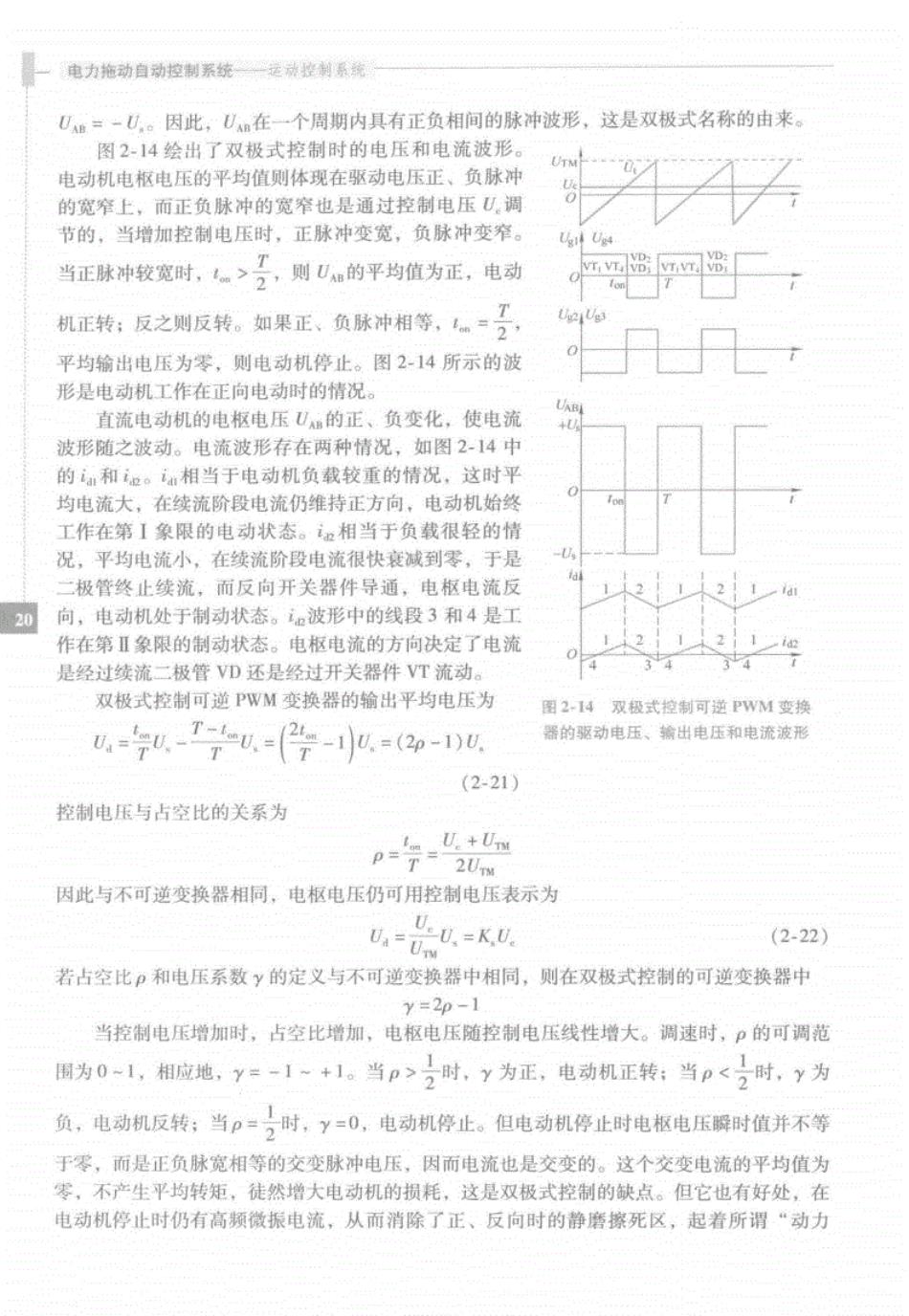
【电力施动自动控制系统一运戒拉制系统 U。=一U,。因此,Um在一个周期内具有正负相间的脉冲波形,这是双极式名称的由来 图2-14绘出了双极式控制时的电压和电流波形。 电动机电枢电压的平均值则体现在驱动电压正、负脉冲 的宽窄上,而正负脉冲的宽窄也是通过控制电压U调 节的,当增加控制电压时,正脉冲变宽,负脉冲变窄。 当正脉冲较宽时,>子,则U的平均值为正,电动 机正转:反之则反转。如果正、负脉冲相等,人一 平均输出电压为零,则电动机停止。图2-14所示的波 形是电动机工作在正向电动时的情况。 直流电动机的电枢电压U的正、负变化,使电流 波形随之波动。电流波形存在两种情况,如图2-14中 的和。i相当于电动机负载较重的情况,这时平 均电流大,在续流阶段电流仍维持正方向,电动机始终 工作在第I象限的电动状态。相当于负载很轻的情 况,平均电流小,在续流阶段电流很快衰减到零,于是 极管终止续流,而反向开关器件导通,电枢电流反 121人21a 20 向,电动机处于制动状态。波形中的线段3和4是工 作在第Ⅱ象限的制动状态。电枢电流的方向决定了电流 是经过续流二极管VD还是经过开关器件VT流动。 04 34 双极式控制可逆PWM变换器的输出平均电压为 图2,14双极式控制可黄PWM变换 器的驱动电压、输出电压和电流波形 (2-21) 控制电压与占空比的关系为 因此与不可逆变换器相同,电枢电压仍可用控制电压表示为 (2-22) 若占空比和电压系数y的定义与不可逆变换器中相同,则在双极式控制的可逆变换器中 y=20-1 当控制电压增加时,占空比增加,电枢电压随控制电压线性增大。调速时,ρ的可调范 围为0-1,相应地,y=-1~+1。当p>2时,y为正,电动机正转;当p<)时,y为 负,电动机反转;当=)时,y=0,电动机停止。但电动机停止时电枢电压瞬时值并不等 于零,而是正负脉宽相等的交变脉冲电压,因而电流也是交变的。这个交变电流的平均值为 零,不产生平均转矩,徒然增大电动机的损耗,这是双极式控制的缺点。但它也有好处,在 电动机停止时仍有高频微振电流,从而消除了正、反向时的静磨擦死区,起着所谓“动力
第2章转速开环控制的直流调速系统一 润滑”的作用 双极式控制的桥式可逆PWM变换器有下列优点: 1)电流一定连续 2)可使电动机在四象限运行; 3)电动机停止时有微振电流,能消除静摩擦死区 4)低速平稳性好,系统的调速范围大: 5)低速时,每个开关器件的驱动脉冲仍较宽,有利于保证器件的可靠导通。 双极式控制方式的不足之处是:在工作过程中,四个开关器件可能都处于开关状态,开 关损耗大,而且在切换时可能发生上、下桥臂直通的事故。为了防止直通,在上、下桥臂的 驱动脉冲之间,应设置死区时间。为了克服上述缺点,可采用单极式控制,使部分器件处于 常通或常断状态,以减少开关次数和开关损耗,提高可靠性,但系统的静、动态性能会略有 降低。关于单极式控制,可参看参考文献[2]。 2,2.3直流PMM调速系统的机械特性 由干采用了阳脉窗调制.亚格地总,即体在驺态情识下。直流PWM周速系统的转矩和专 速也都是脉动的。所谓稳态,是指电动机的平均电磁转矩与负载转矩相平衡的状态,机械特 生是平均转速与平均转矩(由流)的关系。在中.小容量的直流PWM调辣系统中,GBT 已经得到普遍的应用,其开关频率一般在10kHz以上,这时,最大电流脉动量在额定电流的 5%以下,转速脉动量不到到颜宗本线转速的万分之一,可以勿路不计 21 采用不同形式的PWM变换器,系统的机械特性也不一样,关键在于电流波形是否连 续。对于带制动电流通路的不可逆电路,电流方向可逆,无论是重载还是轻载,电流波形都 是连续的,因而机械特性关系式比较简单,现在就分析这种情况。 对于带制动电流通路的不可逆电路(见图2-12),电压平衡方程式分两个阶段: U.=刷,+l业+B(0≤1<) (2-23) 0=++B<n (2-24) 式中R,L一电枢电路的电阻和电感。 按电压方程求一个周期内的平均值,即可导出机械特性方程式。电枢两端在一个周期内 的平均电压是么=y心。平均电流和转矩分别用和T表示,平均转速n=。,而电枢电感 压降L出的平均值在稳态时应为零。于是,平均值方程可写成 yU.=RI+E=RI +C.n (2-25) 结合式(2-18),得机械特性方程式为 (2-26) 或根据T=C用转矩表示 (2-27) 式中C 一电动机在额定磁通下的转矩系数,C。=K中、:
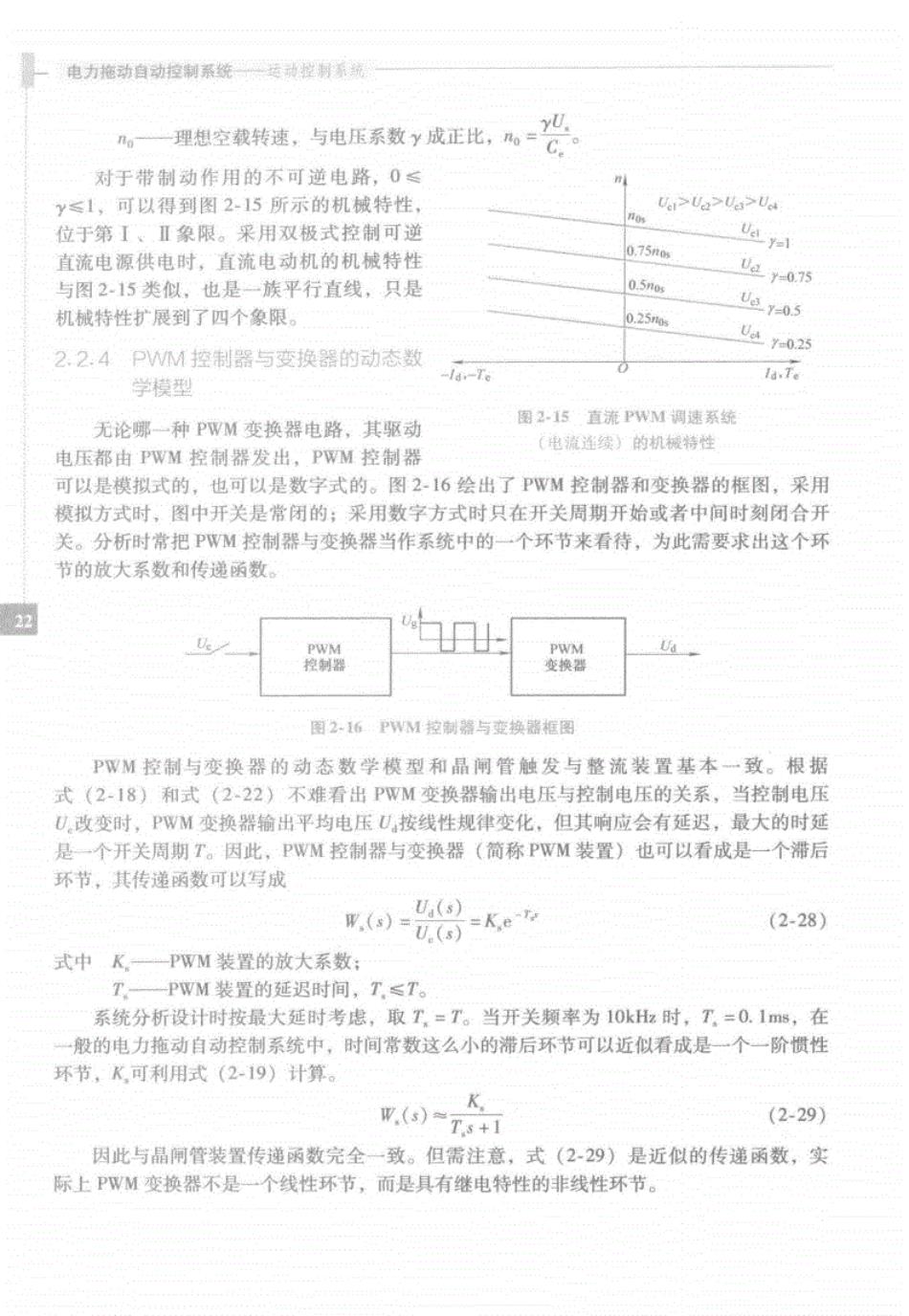
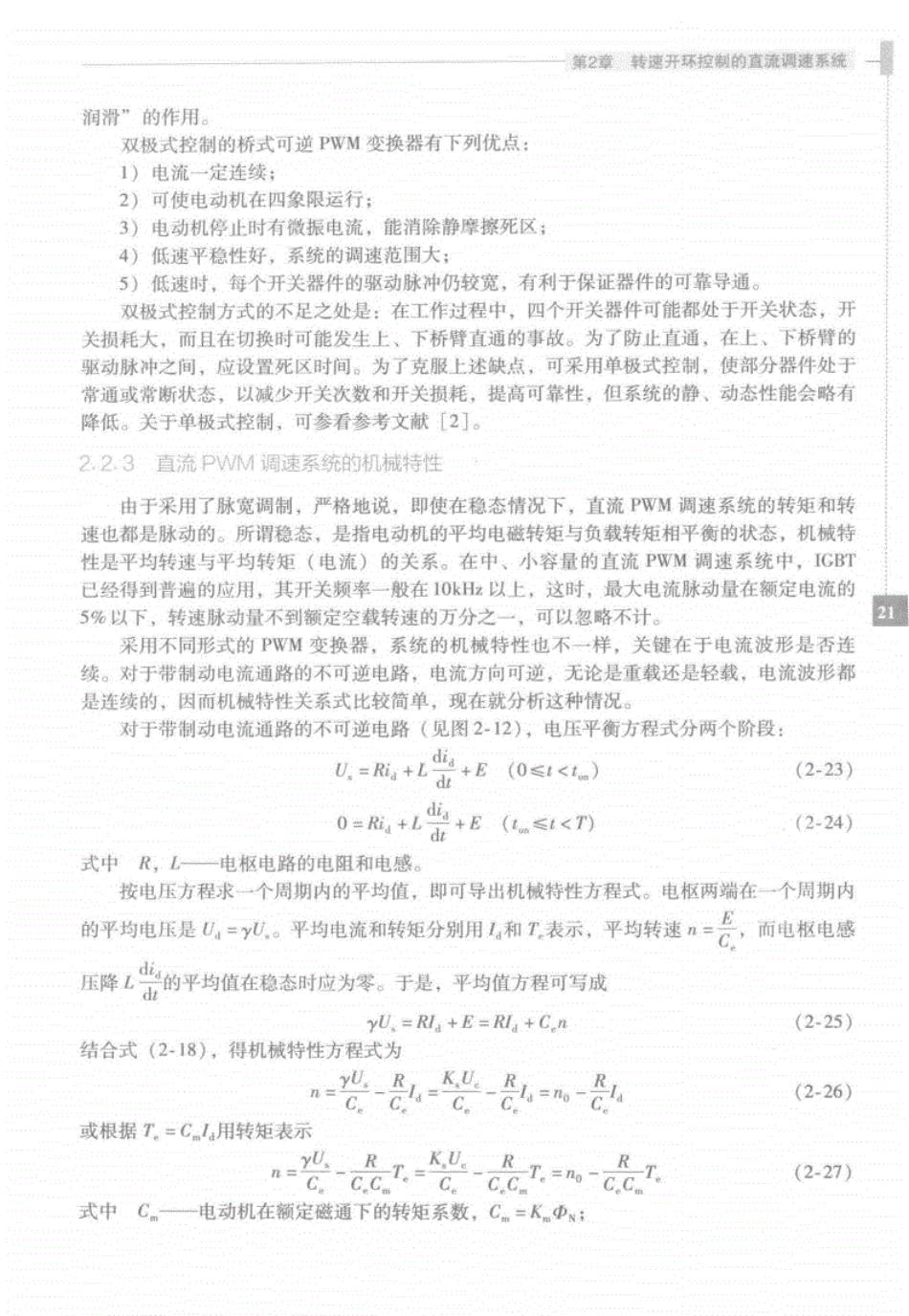
电力拖动自动控制系统一一运动拉时系城 。一理想空载转速,与电压系数y成正比,=冯 C. 对于带制动作用的不可逆电路,0≤ y≤1,可以得到图2-15所示的机械特性。 Ua>Ug>la>Ua 位于第I、Ⅱ象限。采用双极式控制可逆 直流电源供电时,直流电动机的机械特性 与图215类似,也是一族平行直线,只是 ey-07 机械特性扩展到了四个象限。 0.25n Ue 7-05 2.2.4PM控制器与变换器的动态数 Ua y-02 1.T 学模型 无论哪一种PWM变换器电路,其驱动 图215直流PWM调速系统 (电瓷连续)的机械特性 电压都由PWM控制器发出,PWM控制器 可以是模拟式的,也可以是数字式的。图216绘出了PWM控制器和变换器的框图,采用 模拟方式时,图中开关是常闭的;采用数字方式时只在开关周期开始或者中间时刻闭合开 关。分析时常把PM控制器与变换器当作系统中的一个环节来看待,为此需要求出这个环 节的放大系数和传递函数。 22 图2-16PWM控制器与变换密框图 PWM控制与变换器的动态数学模型和品闸管触发与整流装置基本一致。根据 式(2-18)和式(2~22)不难看出PWM变换器输出电压与控制电压的关系,当控制电压 U,改变时,PWM变换器输出平均电压U按线性规律变化,但其响应会有延迟,最大的时延 是一个开关周期T。因此,PWM控制器与变换器(简称PWM装置)也可以看成是一个滞后 环节,其传递函数可以写成 (2-28) 式中K—PWM装置的放大系数: PWM装置的延迟时间,T≤T。 系统分析设计时按最大延时考虑,取T,=T。当开关频率为10kHz时,T,=0.1ms,在 般的电力拖动自动控制系统中,时间常数这么小的滞后环节可以近似看成是一个一阶惯性 环节,K可利用式(2-19)计算。 w(9)=T5+ (2-29) 因此与晶闸管装置传递函数完全一致。但需注意,式(229)是近似的传递函数,实 际上PWM变换器不是一个线性环节,而是具有继电特性的非线性环节
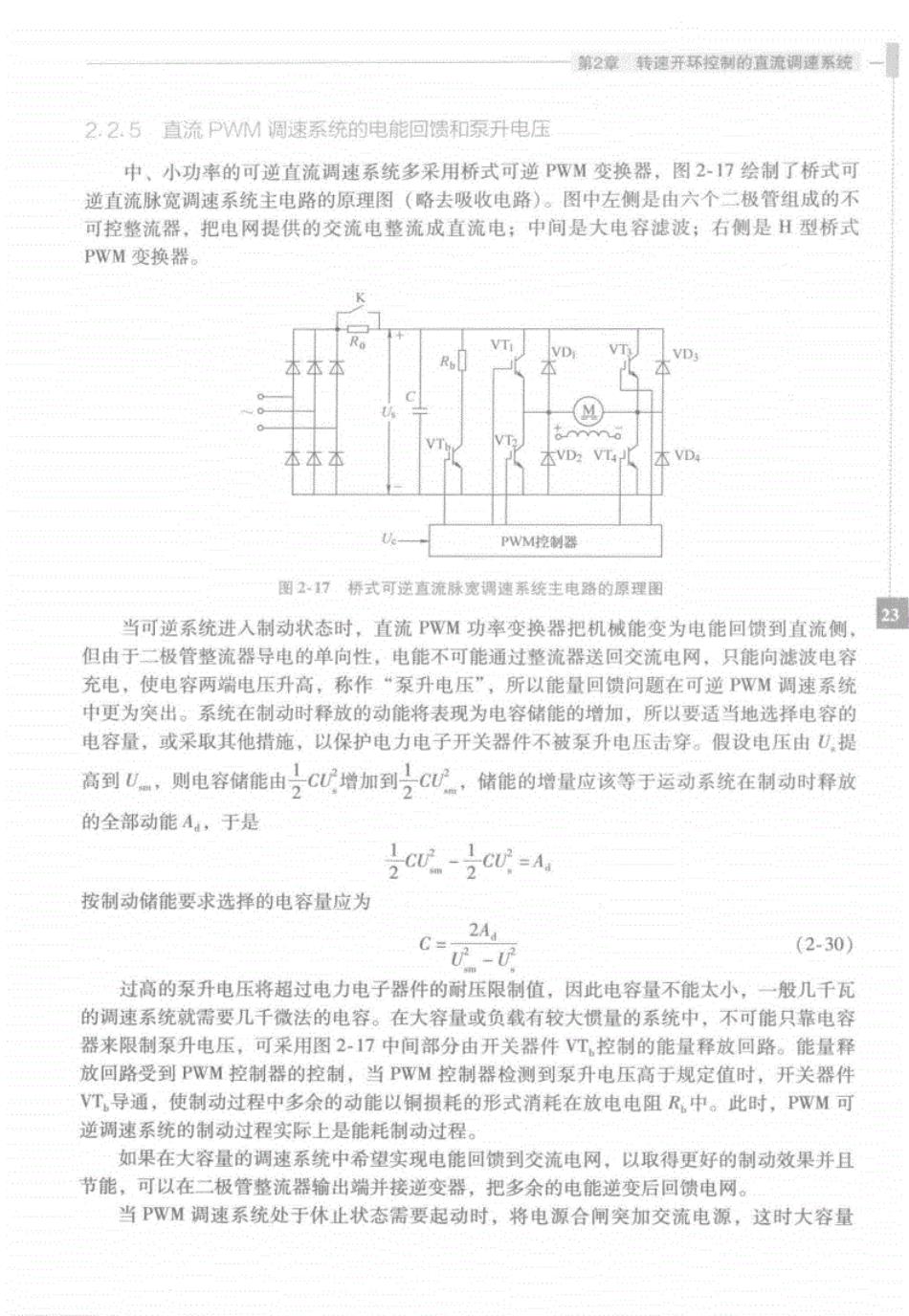
第2章转速开环控制的直流调速系统 2.2.5直流PM调速系统的电能回馈和泵升电压 中、小功率的可逆直流调速系统多采用桥式可逆PWM变换器,图217绘制了桥式可 逆直流脉宽调速系统主电路的原理图(略去吸收电路)。图中左侧是由六个二极管组成的不 可控整流器,把电网提供的交流电整流成直流电;中间是大电容滤波;右侧是H型桥式 PWM变换器 VD (4 木VD:VT4J PWM挖制器 图2~17桥式可逆直流脉宽调速系统生电路的原理图 当可逆系统进人制动状态时,直流PWM功率变换器把机械能变为电能回馈到直流侧, 2 但由于二极管整流器导电的单向性,电能不可能通过整流器送回交流电网,只能向滤波电容 充电,使电容两端电压升高,称作“泵升电压”,所以能量回馈问题在可逆PWM调速系统 中更为突出。系统在制动时释放的动能将表现为电容储能的增加,所以要适当地选择电容的 电容量,或采取其他措施,以保护电力电子开关器件不被泵升电压击穿。假设电压由提 高到U,则电容储能由。C增加到。CU,储能的增量应该等于运动系统在制动时释放 的全部动能A4,于是 2c心-2c=A 按制动储能要求选择的电容量应为 2A c=0-0 (2-30 过高的泵升电压将超过电力电子器件的耐压限制值,因此电容量不能太小,一般几千瓦 的调速系统就需要几千微法的电容。在大容量或负载有较大惯量的系统中,不可能只靠电容 器来限制泵升电压,可采用图2-17中间部分由开关器件VT,控制的能量释放回路。能量释 放回路受到PWM控制器的控制,当PWM控制器检测到泵升电压高于规定值时,开关器件 VT,导通,使制动过程中多余的动能以铜损耗的形式消耗在放电电阻R,中。此时,PWM可 逆调速系统的制动过程:际上是能耗制动时程 如果在大容量的调速系统中希望实现电能回馈到交流电网,以取得更好的制动效果并且 节能,可以在二极管整流器输出端并接逆变器,把多余的电能逆变后回馈电网。 当PWM调速系统处于休止状态需要起动时,将电源合闸突加交流电源,这时大容量