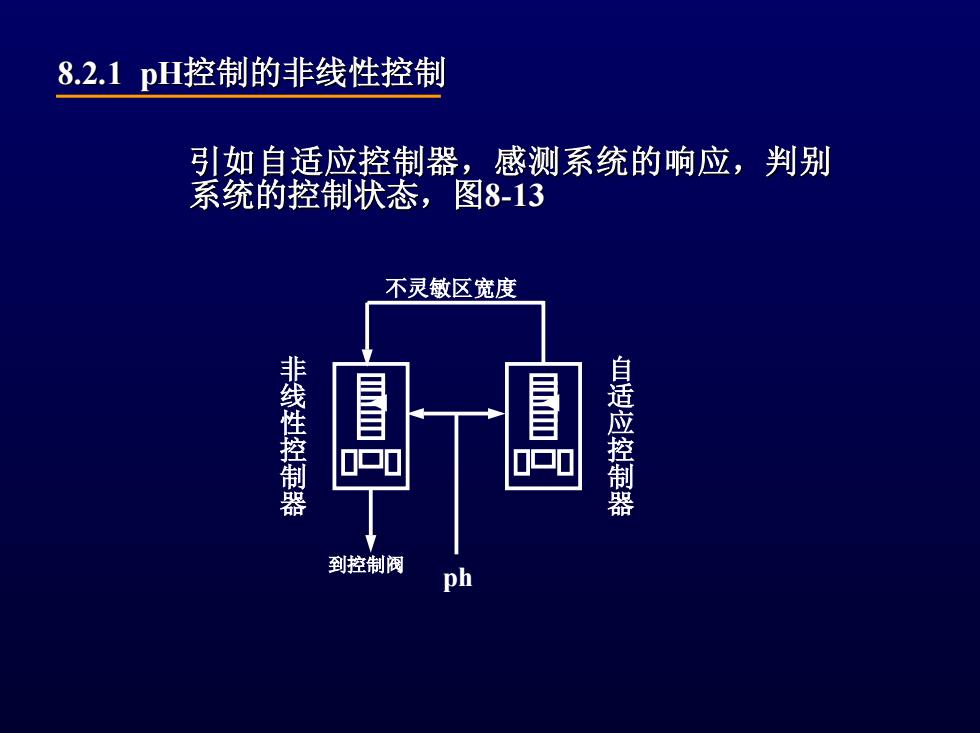
8.2.1 pH控制的非线性控制 引如自适应控制器,感测系统的响应,判别 系统的控制状态,图8-13 不灵敏区宽度 非线性控制器 00 00 自适应控制器 到控制阀 ph
8.2.1 pH控制的非线性控制 控制的非线性控制 引如自适应控制器,感测系统的响应,判别 引如自适应控制器,感测系统的响应,判别 系统的控制状态,图 系统的控制状态,图8-13 到控制阀 不灵敏区宽度 自 适 应 控 制 器 非 线 性 控 制 器 ph

8.2.1pH控制的非线性控制 非线性控制器,根据PH控制系统的响应,输出 信号去设定非线性控制器的不灵敏区的宽度 除此之外,PH值还可以采用智能控制(实 际上也是非线性控制)
8.2.1 pH控制的非线性控制 控制的非线性控制 非线性控制器,根据 非线性控制器,根据PH控制系统的响应,输出 控制系统的响应,输出 信号去设定非线性控制器的不灵敏区的宽度 信号去设定非线性控制器的不灵敏区的宽度 除此之外,PH值还可以采用智能控制(实 值还可以采用智能控制(实 际上也是非线性控制) 际上也是非线性控制)
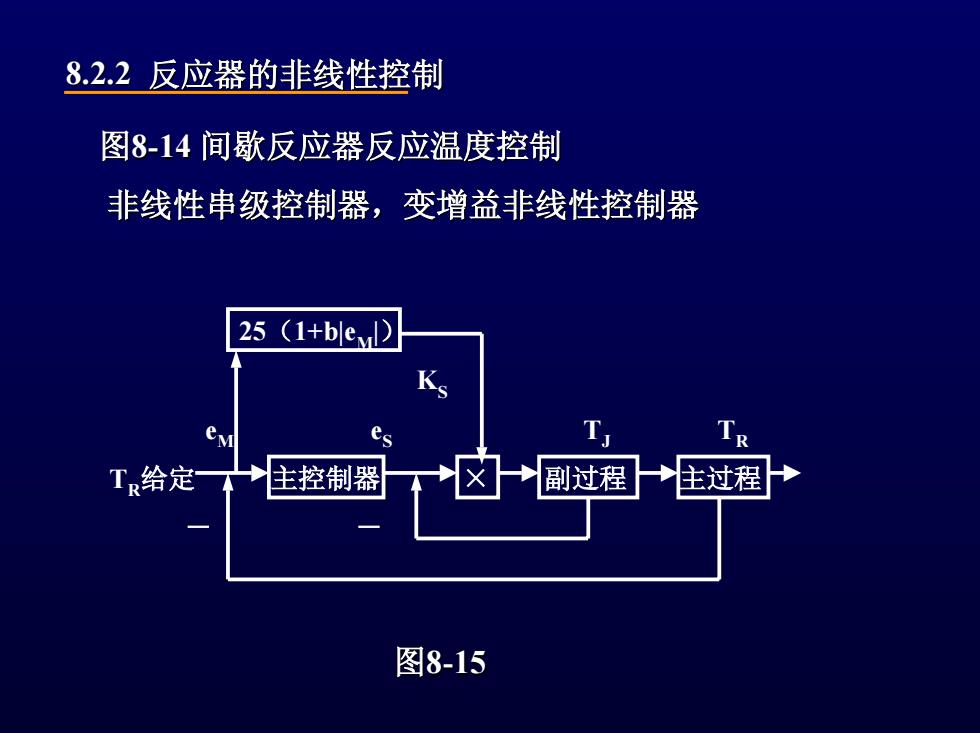
8.2.2反应器的非线性控制 图8-14间歇反应器反应温度控制 非线性串级控制器,变增益非线性控制器 25(1+bel) K es T方 TR TR给定 主控制器 内]剧过程住过程 图8-15
8.2.2 反应器的非线性控制 反应器的非线性控制 图 8 -14 间歇反应器反应温度控制 间歇反应器反应温度控制 非线性串级控制器,变增益非线性控制器 非线性串级控制器,变增益非线性控制器 25 (1+b|e M|) K S e M e S TJ T R T R给定 主控制器 × 副过程 主过程 - - 图 8 -15
8.3位式控制 较为古老的控制方式,继电器型控制, 输出不连续控制信号 缺点:产生不衰减的振荡环 8.3.1位式控制的改进及其发展 (1)一般的改善方法 合理选择中间区,或采用多位式控制,以减小振荡的 幅值
8.3 位式控制 较为古老的控制方式,继电器型控制, 较为古老的控制方式,继电器型控制, 输出不连续控制信号 输出不连续控制信号 缺点:产生不衰减的振荡环 缺点:产生不衰减的振荡环 8.3.1 位式控制的改进及其发展 位式控制的改进及其发展 (1)一般的改善方法 )一般的改善方法 合理选择中间区,或采用多位式控制,以减小振荡的 合理选择中间区,或采用多位式控制,以减小振荡的 幅值
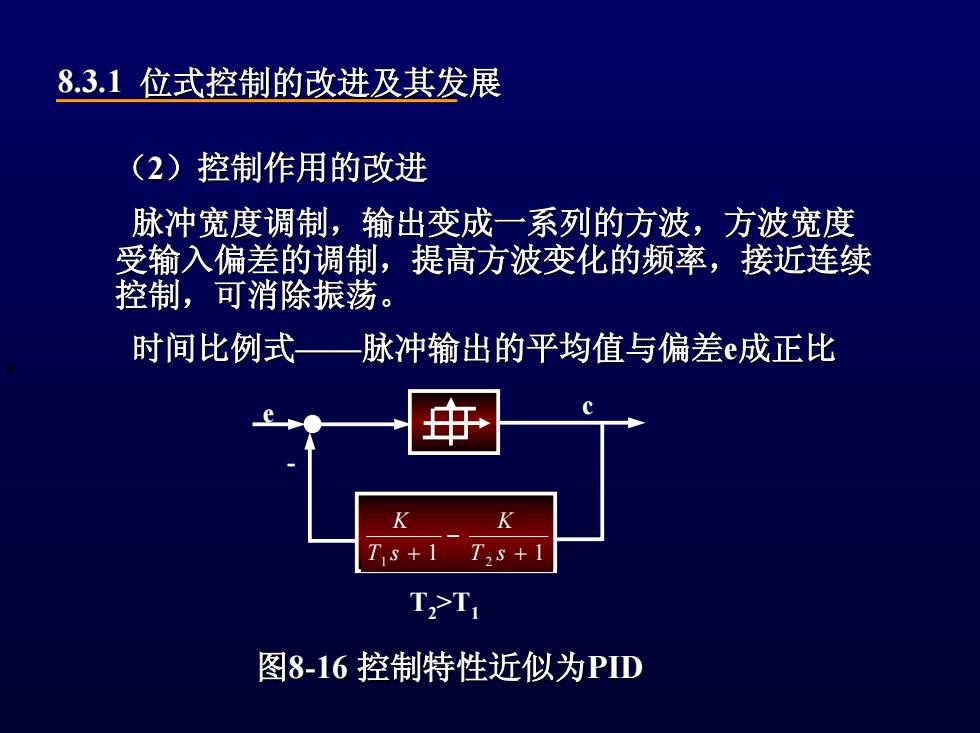
8.3.1位式控制的改进及其发展 (2)控制作用的改进 脉冲宽度调制,输出变成一系列的方波,方波宽度 受输入偏差的调制,提高方波变化的频率,接近连续 控制,可消除振荡。 时间比例式一脉冲输出的平均值与偏差ε成正比 K T,s+1T2s+1 T2>T1 图8-16控制特性近似为PID
8.3.1 位式控制的改进及其发展 位式控制的改进及其发展 ( 2)控制作用的改进 )控制作用的改进 脉冲宽度调制,输出变成一系列的方波,方波宽度 脉冲宽度调制,输出变成一系列的方波,方波宽度 受输入偏差的调制,提高方波变化的频率,接近连续 受输入偏差的调制,提高方波变化的频率,接近连续 控制,可消除振荡。 控制,可消除振荡。 时间比例式——脉冲输出的平均值与偏差 脉冲输出的平均值与偏差 e成正比 e c ė 1 1 2 + 1 − + T s K T s K - T 2>T 1 图 8 -16 控制特性近似为 控制特性近似为PID