8.3.1位式控制的改进及其发展 (3)带模型反馈的位式控制 双位式控制器、模型和被控设备,控制器与模型 组成反馈回路 T m S 图8-19使用模型的开关控制
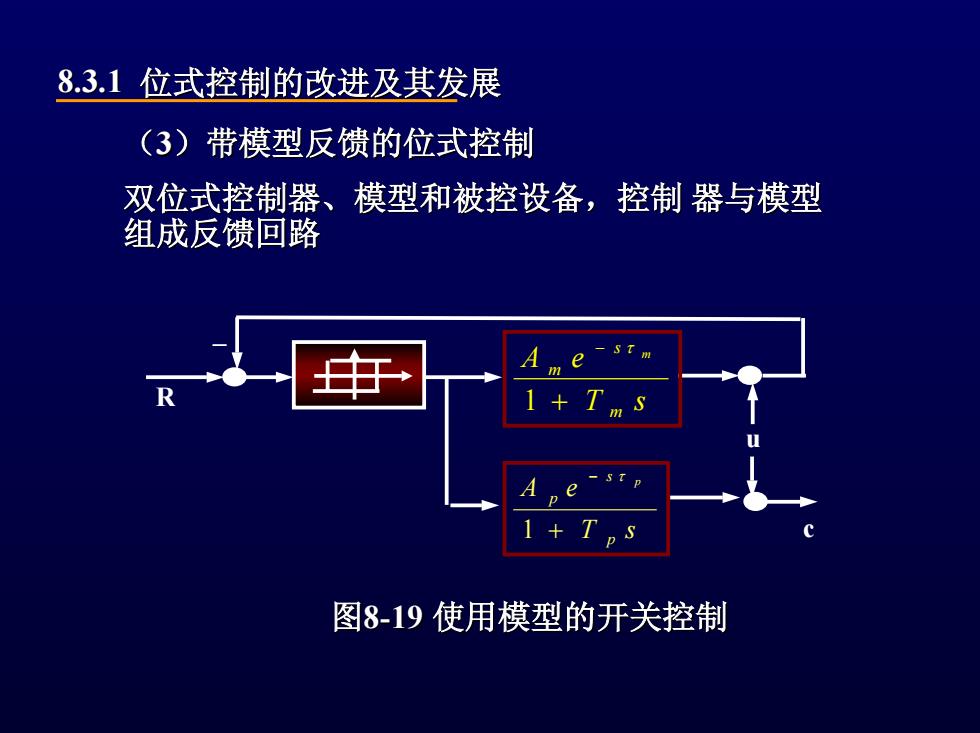
8.3.1 位式控制的改进及其发展 位式控制的改进及其发展 ( 3 )带模型反馈的位式控制 带模型反馈的位式控制 双位式控制器、模型和被控设备,控制 双位式控制器、模型和被控设备,控制 器与模型 组成反馈回路 T s A e m s m m + − 1 τ _ R u T s A e p s p p + − 1 τ c 图 8 -19 使用模型的开关控制 使用模型的开关控制
8.3.2Bang-Bang控制 属于一种最优控制,时间最优控制,可以通过最优控制 理论进行推导 关键:开关时间的计算 (1)手动Bang-Bang控制 操作人员根据开关时间计算公式求出切换时间,手动 控制阀门
8.3.2 Bang-Bang 控制 属于一种最优控制,时间最优控制,可以通过最优控制 属于一种最优控制,时间最优控制,可以通过最优控制 理论进行推导 关键:开关时间的计算 关键:开关时间的计算 (1)手动Bang-Bang控制 操作人员根据开关时间计算公式求出切换时间,手动 操作人员根据开关时间计算公式求出切换时间,手动 控制阀门
8.3.2Bang-Bang控制 (2)自动Bang-Bang控制 快速调节器 0(K1X2) Y=X Gp 2=X S 非线性函数发生器 快速调节器 通过状态反馈,得到开关函数,决定控制作用, 以实现时间最优控制
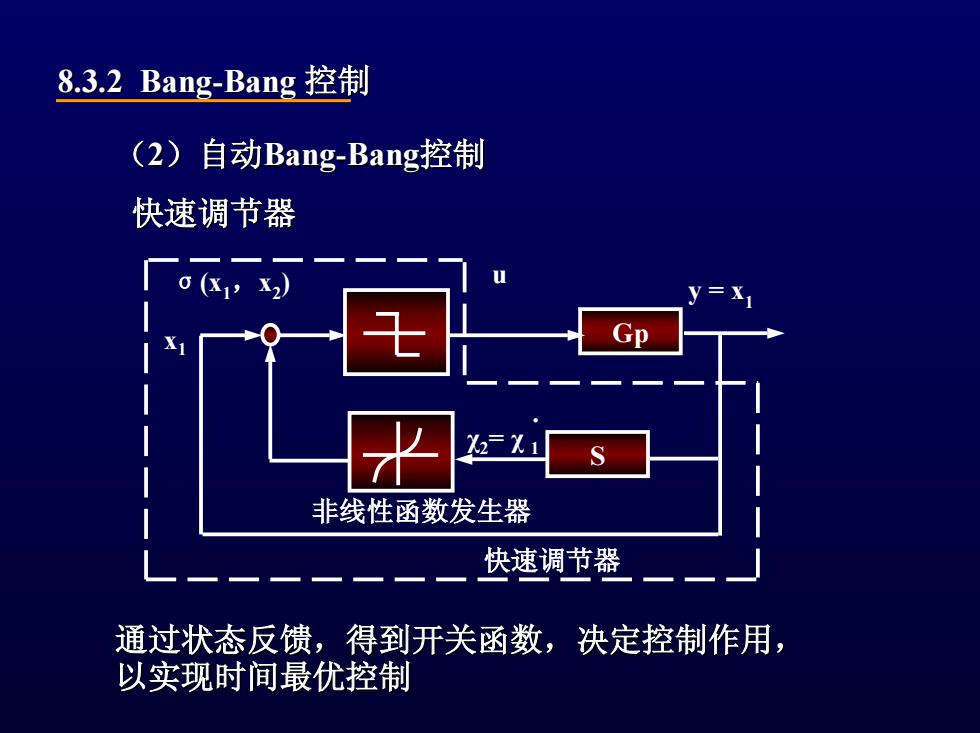
8.3.2 Bang-Bang 控制 (2)自动Bang-Bang控制 快速调节器 x Gp 1 σ(x1,x2) y = x1 u S χ2= χ 1 . 非线性函数发生器 快速调节器 通过状态反馈,得到开关函数,决定控制作用, 通过状态反馈,得到开关函数,决定控制作用, 以实现时间最优控制 以实现时间最优控制