
第3章转速闭环控制的直流调速系统 调节器:比例、积分、微分 根据自动控制原理,将系统的被调节量作为 反馈量引入系统输入端,与给定量进行比较,用 比较后的偏差值对系统进行控制,可以有效地抑 制甚至消除扰动造成的影响,从而维持被调节量 很少变化或不变,这就是反绩控制的基本作用。 在调速系统中,被调节量是转速一一构成的是转速 ()比例调节器 有静差调速 闭环控制的直流周速系统。 (2)I、PI调节器 无静差调速 S3.1有静差(比例控制)的转速闭环直流调速系统 1,转速反馈控制直流调速系统的组成 S3.1.1比例控制直流调速系统的结构与静特性 比例调节器: R =-R 图3】带转速负反馈的闭环直流调速系统原理框图 各环节稳态关系如下: 下面分析闭环调速系统的稳态特性,以 确定它如何减少转速波动。 ()电压比较环节 为了突出主要矛盾,先作如下的假定 调节器的净输入信号 (1)忽略各种非线性因素,假定系统中各 U,=U-U 环节的输入输出关系都是线性的,或者只 ()比斜调节器 取其线性工作段; U.=k,4☑ (2)忽略控制电源和电位器的内阻。 3)测速反馈环节U,=am
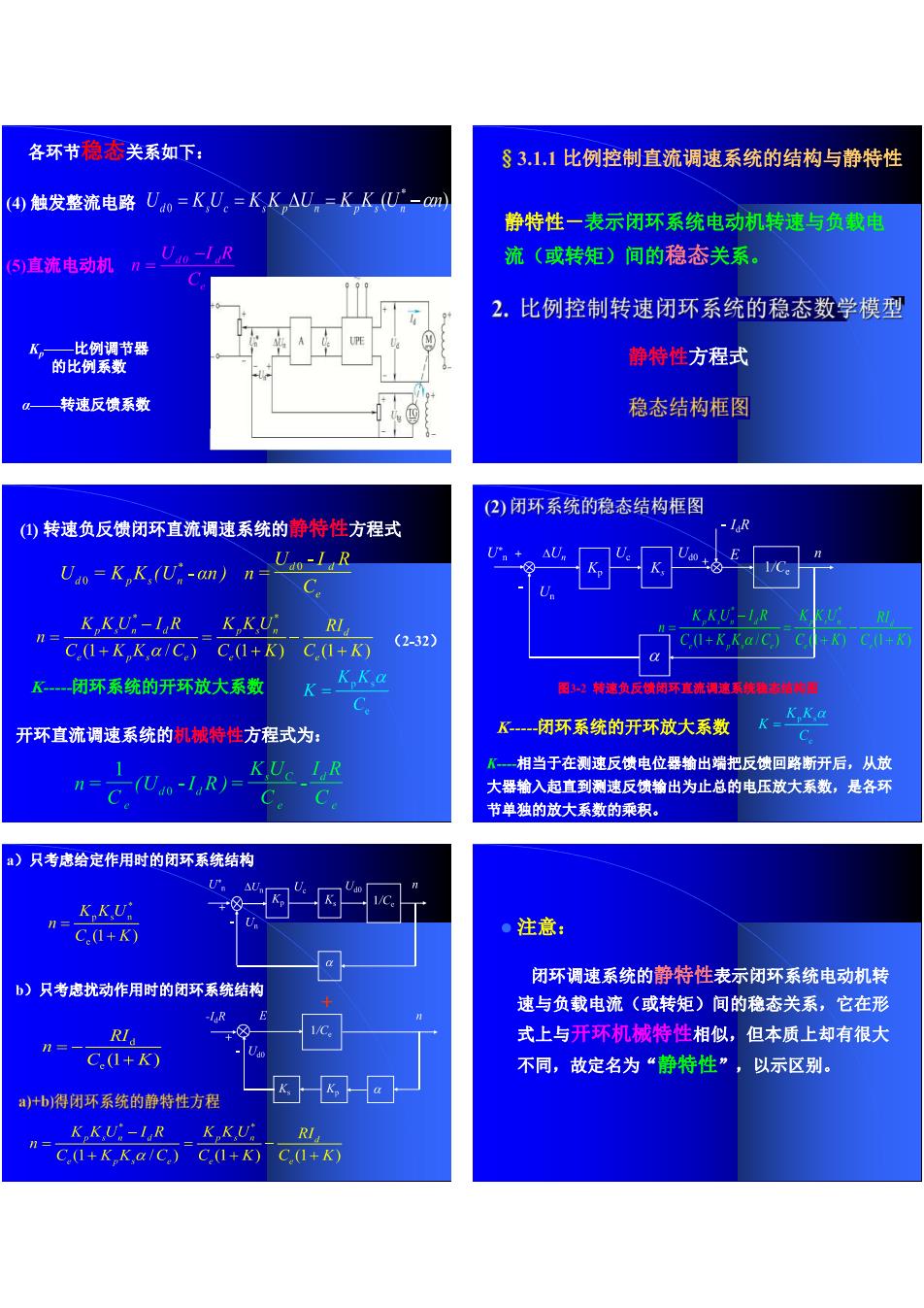
各环节稳态关系如下: S3.1,1比例控制直流调速系统的结构与静特性 4触发整流电路Un=KU=KK△U=KK(U广-am) 静特性一表示闭环系统电动机转速与负载电 5)直流电动机=U一, 流(或转矩)间的稳态关系。 2.比例控制转速闭环系统的稳态数学模型 静特性方程式 转速反债系数 稳态结构框图 (②)闭环系统的稳态结构框图 ()转速负反馈闭环直流调速系统的静特性方程式 Uo=K,K,Ui-an)n Uo-1R C KKU-IRKKU RI /C)C()C.(G) K闭环系统的开环放大系数 磨小特南负反净明醉重满调童成纳非地角门 开环直流调速系统的机城特性方程式为: …闭环系统的开环放大系数 K= n= -(Un-1R)-KU LR K一相当于在测速反馈电位器输出端把反馈回路断开后,从放 大器输入起直到测速反馈输出为止总的电压放大系数,是各环 节单独的放大系数的乘积。 )只考虑给定作用时的闭环系统结构 KK.U' C+K) 注意 b)只考虑扰动作用时的闭环系统结构 闭环调速系统的静特性表示闭环系统电动机转 速与负载电流(或转矩)间的稳态关系,它在形 式上与开环机械特性相似,但本质上却有很大 不同,故定名为“静特性”,以示区别。 ab)得闭环系统的静特性方程 KKU:-IR KKU; n-CIC)C0万 C+)
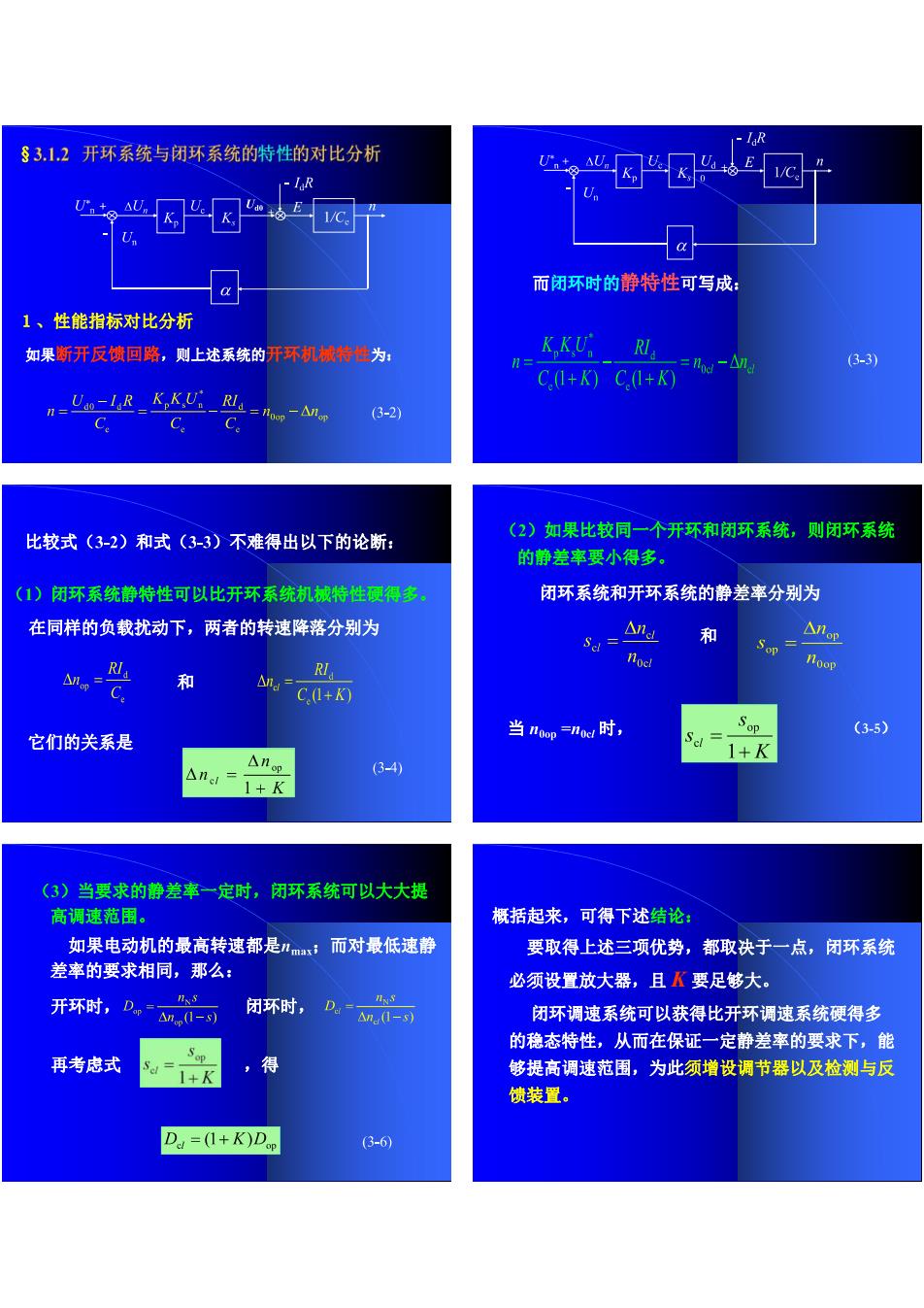
-R 53.12开环系统与闭环系统的特性的对比分析 -IR 而闭环时的静特性可写成 1、性能指标对比分析 如果断开反馈回路,则上述系统的开环机城特性为: KKU._ C0 (3.3 % =6p-n3-2 C 比较式(3-2)和式(3-3)不难得出以下的论断: (2)如果比较同一个开环和闭环系统,则闭环系统 的静差率要小得多, ()闭环系统静特性可以比开环系统机械特性硬得多。 闭环系统和开环系统的静差率分别为 在同样的负载扰动下,两者的转速降落分别为 Sd= △和 RI. An C0+ 它们的关系是 当mp=e时 (3-5) K (34 (3)当要求的静差率一定时,闭环系统可以大大提 高调速范围, 概括起来,可得下述结论: 如果电动机的最高转速都是m:而对最低速静 要取得上述三项优势,都取决于一点,闭环系统 差率的要求相同,那么: 必须设置放大器,且K要足铭大。 开环时,“司 闭环时,司 闭环调速系统可以获得比开环调速系统硬得多 的稳态特性,从而在保证一定静差率的要求下,能 再考虑式 1+K 够提高调速范围,为此须增设调节器以及检测与反 馈装置 Da=(l+K)Dp 3-6
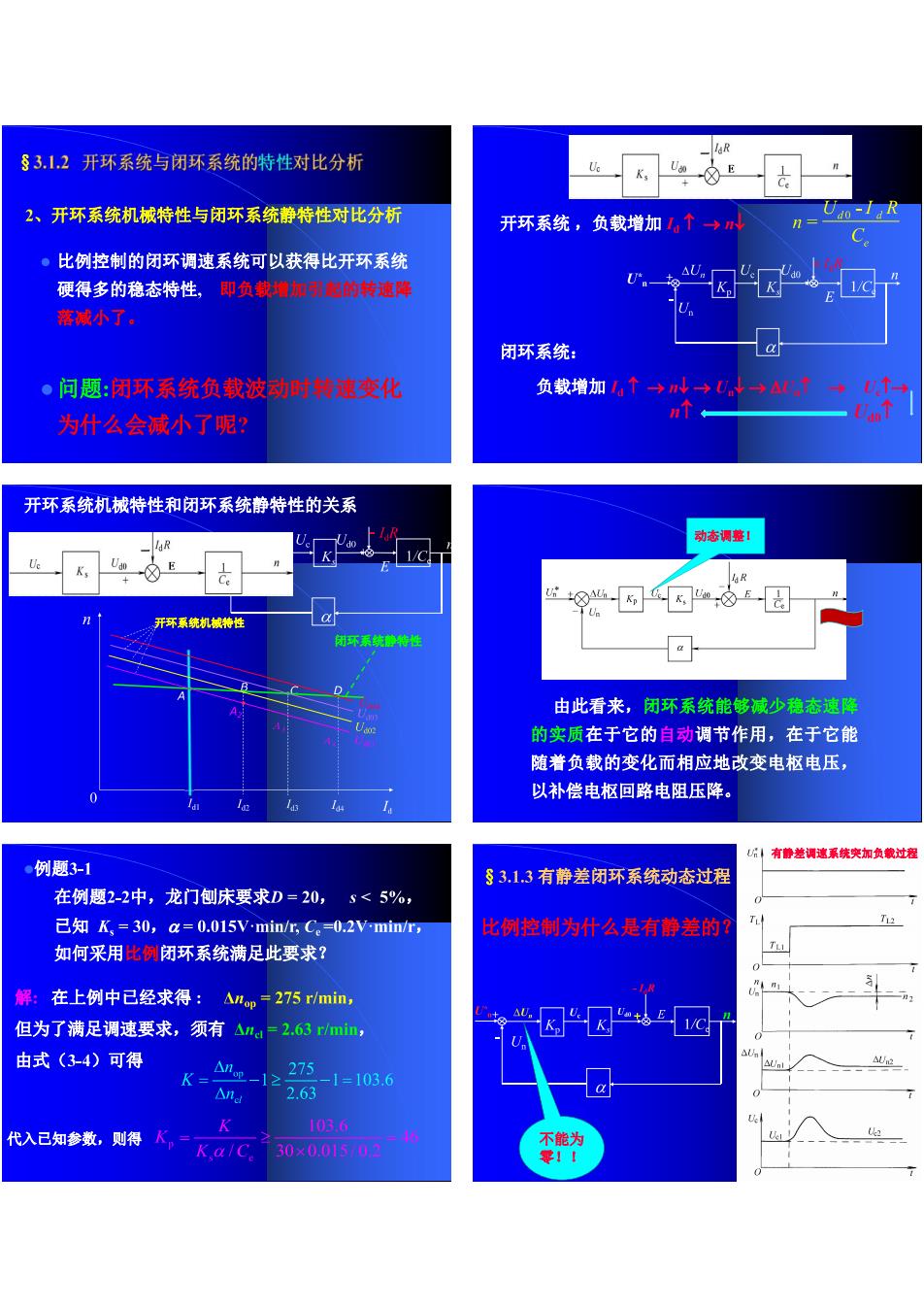
S3,12开环系统与闭环系统的特性对比分析 2、开环系统机城特性与闭环系统静特性对比分析 开环系统,负载增加↑→ n-ao-1aR C 。比例控制的闭环调速系统可以获得比开环系统 硬得多的稳态特性,即负领增加的转速 客减小了 闭环系统: 。问题:闭环系统负载波动时转速变化 负载增加,↑→+ 为什么会减小了呢? 开环系统机械特性和闭环系统静特性的关系 R 开环系统机城性 D 由此看来,闭环系统能够减少稳态速 的实质在于它的自动调节作用,在于它能 随着负载的变化而相应地改变电枢电压, 以补偿电枢回路电阻压降。 ●例题3-1 片!有静楚调速票统突加负教过划 S3.1.3有静差闭环系统动态过程 在例题2-2中,龙门创床要求D=20,s<5%, 已知K=30,a=0.015 V.min/r,.C。=0.2Vmi 比例控制为什么是有静差的 如何采用比例闭环系统满足此要求? 解:在上例中已经求得:△np=275r/min, 但为了满足调速要求,须有△m=2.63r1min, 由式(34)可得 275 a 代入已知李,则得K,一K己 036 30×0.0150

S3.1.4闭环调速系统的反馈控制规律 S3,1.4闭环调速系统的反馈控制规律 1,比例控制系统是被调量有静差的调速系统 闭环时的静特性为: 转速反馈调速系统是一种基本的反馈控制系 -A 统,它具有以下三个基本特征,也就是反馈控制 =M 63 C.0+K0C.0+K0 的基本规律,各种不另加其他调节器的基本反惯 采用比例放大器,闭环系统的开环放大系数 控制系统都服从于这些规律」 值越大,系统的稳态性能越好。然而,闭环系统的稳 态速整为: Ar-C.0+K) 只有 ,才能使△=0,而这是不可能的。因此,这 样的调速系统叫做有静差调速系统。 S3.1.4闭环调速系统的反馈控制规律 ■调速系统的扰动源 2,服从给定,抵抗扰动 负载变化的扰动(使1变化); 交流电源电压波动的扰动(使K变化); 。找动—除给定信号外,作用在控制系统各环节 上的一切会引起输出量变化的因素都叫做“扰动作 电动机励磁的变化的扰动(造成C变化): 用”。 -放大器输出电压漂移的扰动(使K变化); 温升引起主电路电阻增大的扰动(使变化) 检测误差的扰动(使a变化)。 ,变化 ▣抗扰能力分析K。变 电源被动 电变化 电阻变化 变化 爵盛变化 a 检海误若 检意误是 图3一4闭环调速系续的给定作用和扰动作用 。雕是,如果在反续通道上的测速反绩系数受到某种影响而发 例如:→d0l→d→Um→ant 生变化,它非但不能得到反馈控制系统的抑制,反而会增大 被调量的误差, mt←La0↑eCet -例如:a→↑→A,↓→U↓→Um↓→mk 。反馈控制系统对被反馈环包围的前向通道上的找 因此,反锁控制系统所能抑制的只是被反锁环包固的前向 动都有抑制功能, 通道上的扰动