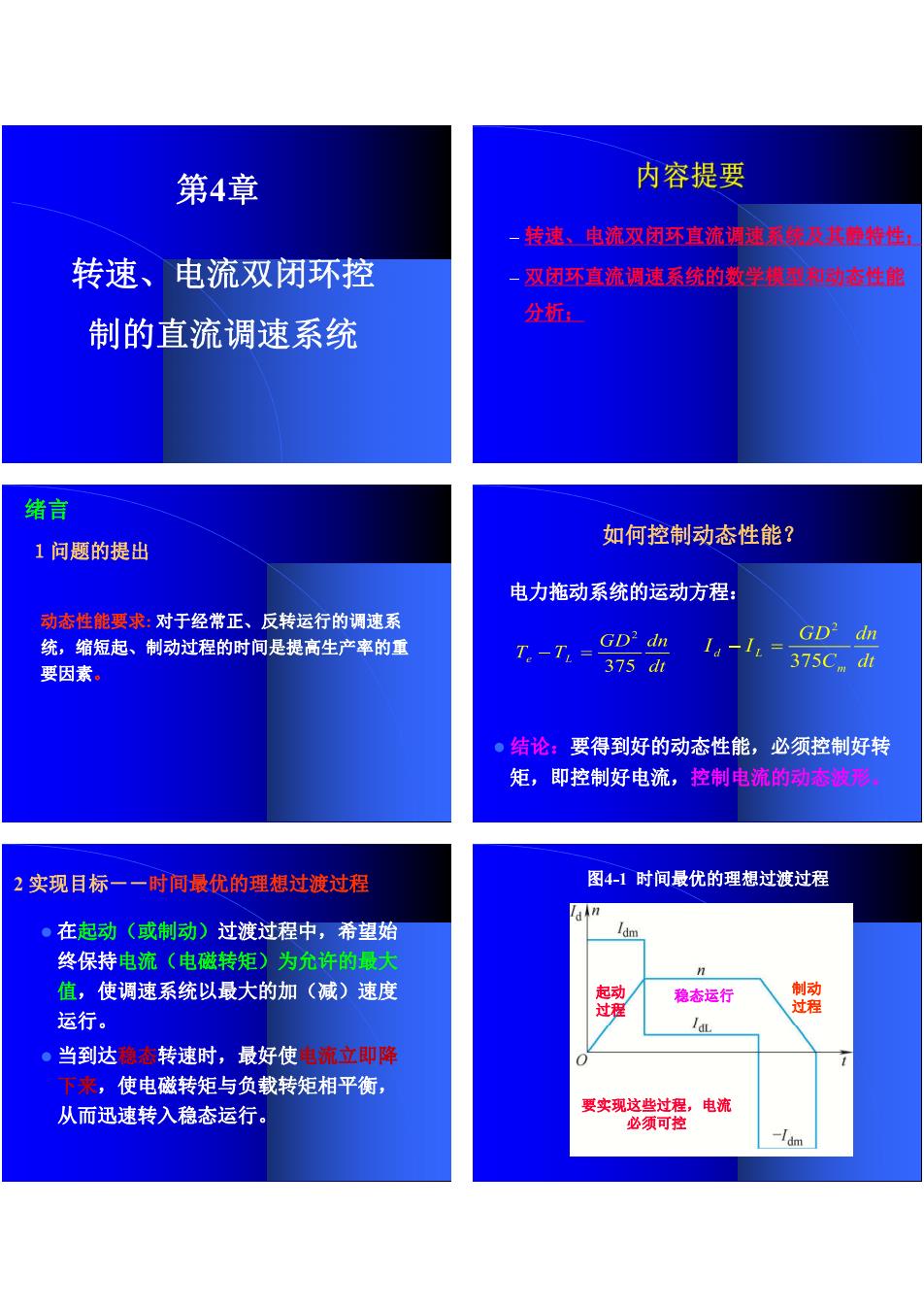
第4章 内容提要 一转速、电流双闭环宜流调速系统投其●特性 转速、电流双闭环控 一双闭环直流调速系统的数学慎型和动者性能 分析: 制的直流调速系统 绪言 如何控制动态性能? 1问题的提出 电力拖动系统的运动方程: 动态性能要求:对于经常正、反转运行的调速系 统,缩短起、制动过程的时间是提高生产率的重 GD2 dn 要因素。 375d 375C dt 。结论:要得到好的动态性能,必须控制好转 矩,即控制好电流,控制电流的动态波形 2实现目标一一时间最优的理想过波过程 图4-1时间最优的理想过渡过程 。在起动(或制动)过渡过程中,希望始 /dm 终保持电流(电磁转矩)为允许的最大 值,使调速系统以最大的加(减)速度 稳态运行 运行。 。当到达卷态转速时,最好使电流立即降 下来,使电磁转矩与负载转矩相平衡, 从而迅速转入稳态运行 要实现这些; 电流

单闭环系统能否实现 3解决思路 为了实现在允 理想的快速起动过 转速单闭环系统不能控制电流(或柜)的动 许条件下的最快起动, 态过程, 关健是要获得一段使 电流保持为最大值/加 的恒流过程。 运行 采用电流负反馈应 该能够得到近似的恒 流过程。 4.1转速、电流反馈控制直流调速系统的 我们希望能实现如下控制: 组成及其静特性 ◆起功过程,只有电流反,有转建 §4.1.1双闭环控制直流调速系统的组成 ◆在系统中设置两个调节器,分别引入转速负反馈 ◆在达到稳态转速后,又希望转速负反债发挥主 和电流负反馈以调节转速和电流, 要作用,不再让电流负反馈起阻碍作用。 ◆把转速调节器的输出当作电流调节器的输入,再 用电流调节器的输出去控制电力电子变换器UPE, 怎样才能做到这种既存在转速和电流两种负反 馈,又使它们能分别在不同的阶段里采用不同配合 ◆从闭环结构上看,电流环在里面,称作内环:转 方式起作用呢? 速环在外边,称作外环。形成了转速、电流反馈 控制直流调速系统(简称双闭环系统)。 S4.1.1双闭环控制直流调速系统的组成 系统电路原理图 系统的组成 TA ASR ACR 外环 下4-2双闭环直流调速系线
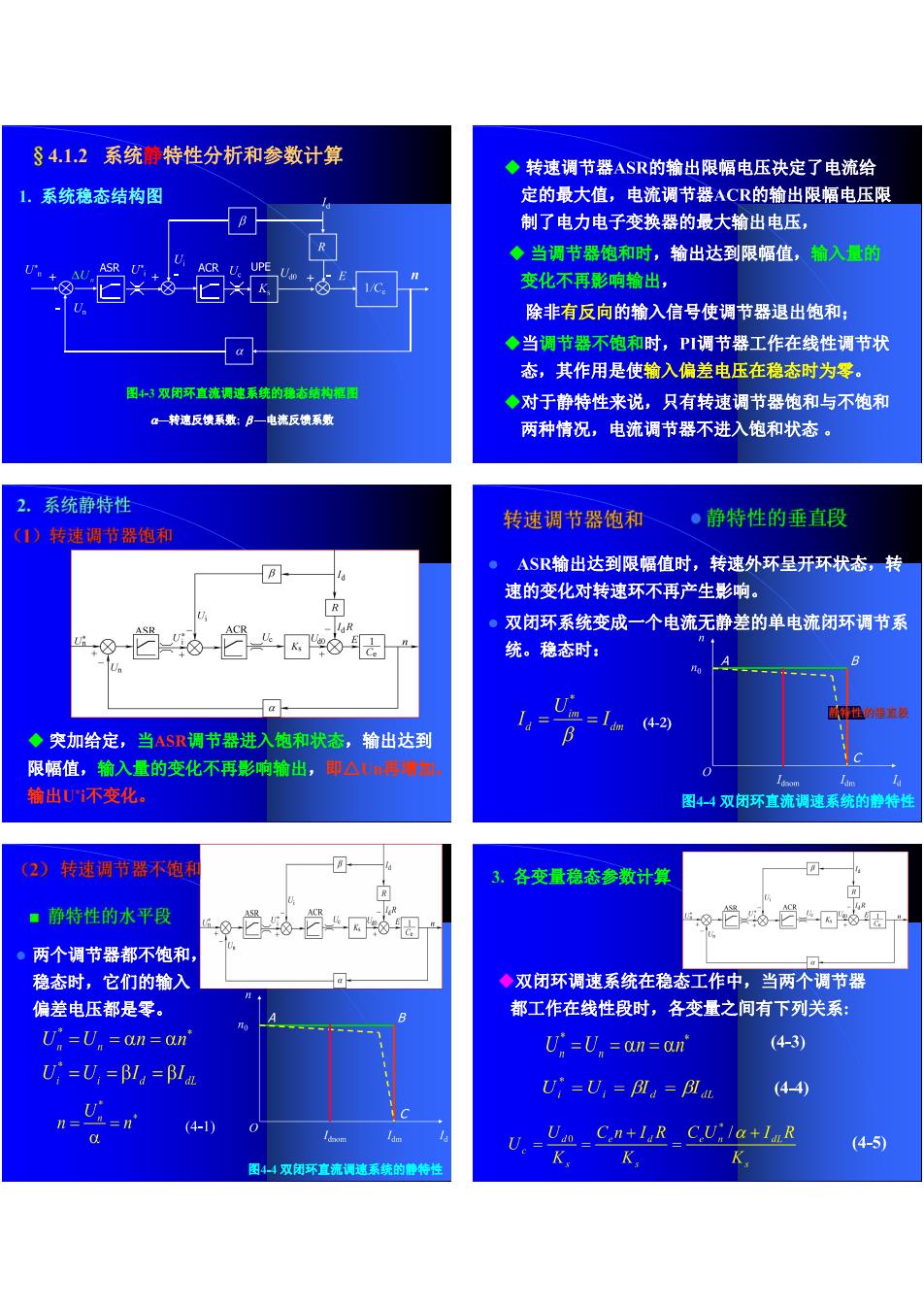
S4.1.2系统静特性分析和参数计算 ◆转速调节器ASR的输出限幅电压决定了电流给 系统稳态结构图 定的最大值,电流调节器ACR的输出限幅电压限 制了电力电子变换器的最大输出电压, ◆当调节器饱和时,输出达到限幅值,输入量的 变化不再影响输出, 除非有反向的输入信号使调节器退出饱和: ◆当调节器不饱和时,P川调节器工作在线性调节状 态,其作用是使输入偏差电压在稳态时为零。 图+:双闭环直流清速系统的角者结构烟图 ◆对于静特性来说,只有转速调节器饱和与不饱和 。特速反博系意:户一电流反缺系感 两种情况,电流调节器不进入饱和状态。 2系统静特性 ●静特性的垂直段 (1)转速调节器饱和 转速调节器饱和 ASR输出达到限幅值时,转速外环呈开环状态,转 速的变化对转速环不再产生影响。 。双闭环系统变成一个电流无静差的单电流闭环调节系 统。稳态时 a ◆突加给定,当ASR调节器进入饱和状态,输出达到 =I(-3) B 限幅值,输入量的变化不再影响输出,即△1本增 输出U不变化。 图44双闭环直流调速系统的静特台 (2)转速调节器不饱 3.各变量稳态参数计算 。静特性的水平段 。两个调节器都不饱和 稳态时,它们的输入 ◆双闭环调速系统在稳态工作中,当两个调节器 偏差电压都是零。 都工作在线性段时,各变量之间有下列关系: U:=U,=an=an U,=U,=an=an' (4-3) U;=U,=BI,=BIa U;=U BI Bl (4 n-U-m (4 U _Uin_C.n+IR_CU:la+laR K (4-5 图4双环流系体的修
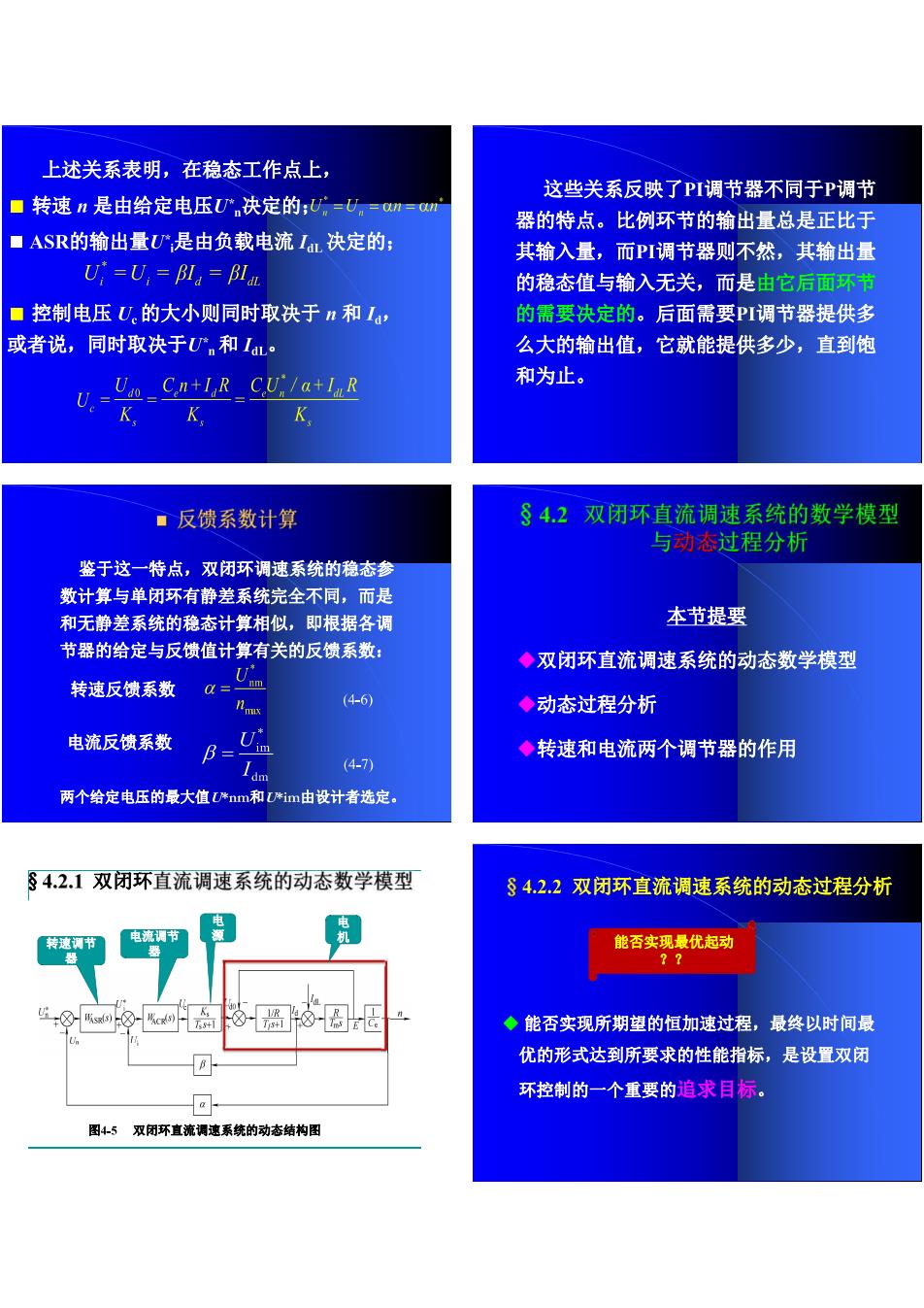
上述关系表明,在稳态工作点上, 转速n是由给定电压U决定的:==m 这些关系反映了PI调节器不同于P调节 器的特点。比例环节的输出量总是正比于 ASR的输出量U是由负载电流I决定的: 其输入量,而PI调节器则不然,其输出量 U:=U,BI,Bla 的稳态值与输入无关,而是由它后面环节 ■控制电压的大小则同时取决于m和 的需要决定的。后面需要PI调节器提供多 或者说,同时取决于”,和1a。 么大的输出值,它就能提供多少,直到饱 U-a-Cn*R.Cga出 和为止。 K K K ■反馈系数计算 §42双闭环直流调速系统的数学模型 与动态过程分析 鉴于这一特点,双闭环调速系统的稳态参 数计算与单闭环有静差系统完全不同,而是 和无静差系统的稳态计算相似,即根据各调 本节提要 节器的给定与反馈值计算有关的反馈系数 ◆双闭环直流调速系统的动态数学模型 转速反馈系数a= (46 ◆动态过程分析 电流反馈系数 B= U ◆转速和电流两个调节器的作用 (4-7) 两个给定电压的最大值Lnm和U*im由设计者选定, §4.2.1双闭环直流调速系统的动态数学模型 $4.2.2双闭环直流调速系统的动态过程分析 能香去动 ◆能否实现所期望的恒加速过程,最终以时间最 优的形式达到所要求的性能指标,是设置双闭 环控制的一个重要的追求目标。 田45和闭环直流调速系统的动态结构田
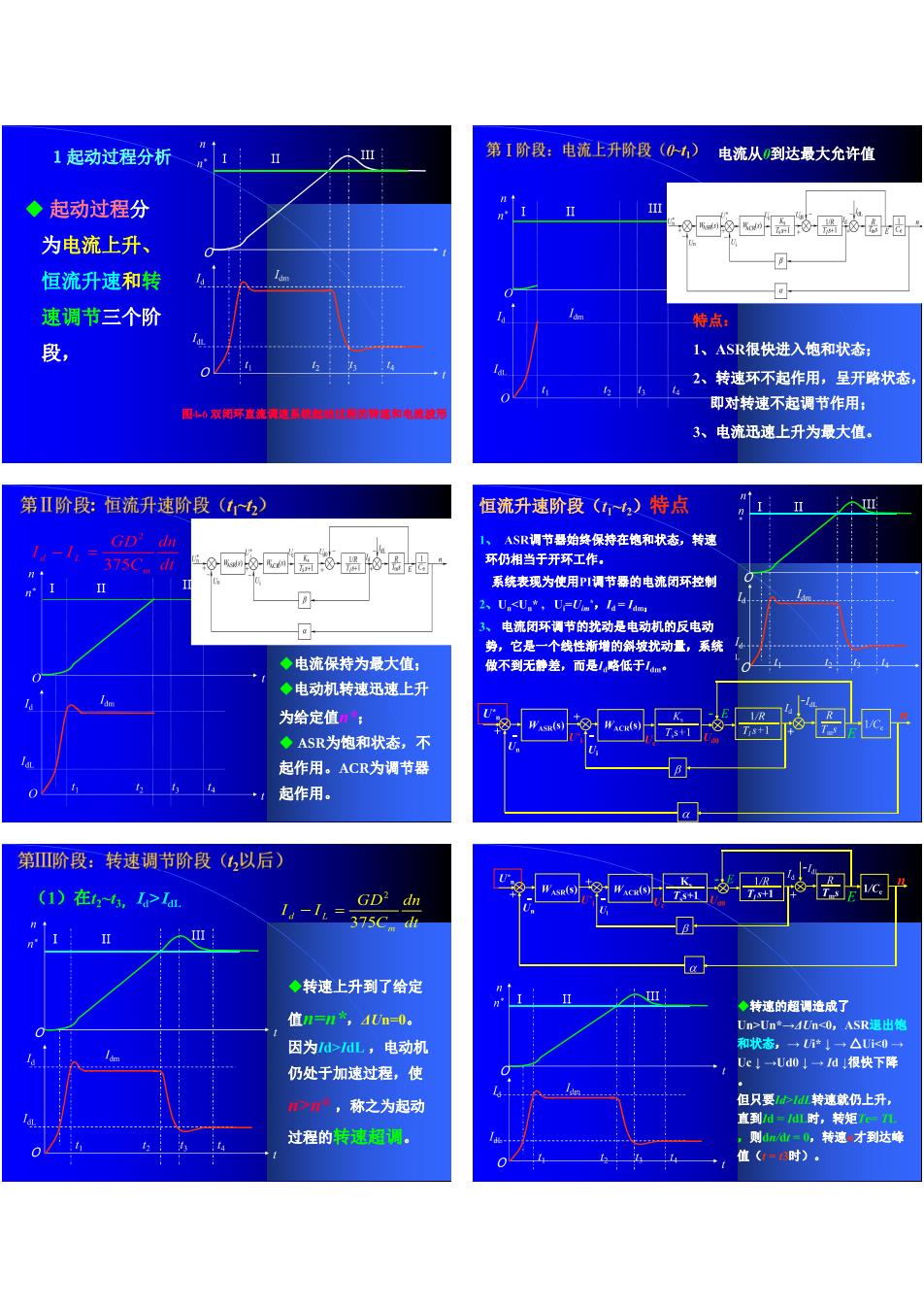
1起动过程分析 第I阶段:电流上升阶段(心)电流从到达最大允许值 ◆起动过程分 为电流上升 恒流升速和转 速调节三个阶 特点: 1、ASR很快进入饱和状态 2、转速环不起作用,呈开路状态 即对转速不起调节作用: 3、电流迅速上升为最大值, 第Ⅱ阶段:恒流升速阶段(2 恒流升速阶段(,)特点 GD du 始降保持在饱和状态,转 系统表现为使用P调节每的电流闭环控制 ,它是一个线性渐增的斜坡扰动量,系 ◆电流保持为最大值 做不到无静差,而是,略低于am。 ◆电动机转速迅速上升 为给定值: ◆ASR为饱和状态,不 起作用。ACR为调节器 起作用。 第阶段:转速调节阶段(,以后 (1)在4,> GD dn 1,-1=375C4 a ◆转速上升到了给定 .T 值1=形*,4亿n=0。 因为dL,电动机 仍处于加速过程,使 →0d快下释 >,称之为起动 只要转速就仍上开 过程的转速超调, 时)